IMX6Q移植ft5x06_ts触摸屏驱动
2017-08-24 10:43
162 查看
一、附上原理图
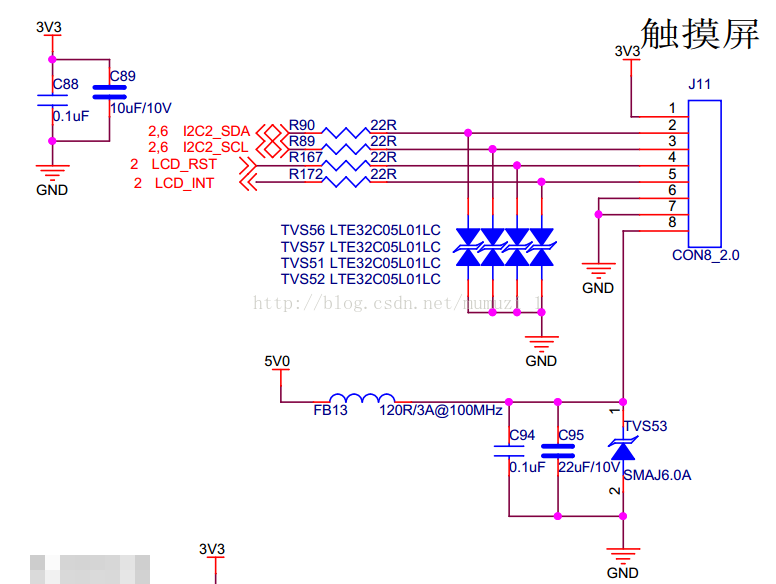
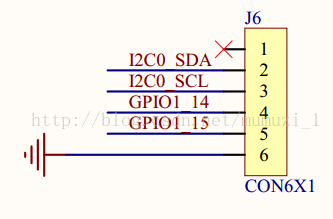
第一张图是开发板的触摸屏原理图,第二张是显示屏触摸屏接口原理图。对应起来只用到了六个脚,开发板7、8脚不用管。
从开发板触摸屏接口可以看到用到了i2c2_scl、i2c2_sda,RST、INT四个主要的引脚,这里要查看触摸屏接口的GPIO_14/15对应的是RST和INT的哪个脚,具体看核心板原理图。
首先对i2c进行分析。由于内核自带i2c,基本不需要做修改,我们需要在板级文件中注册触摸屏ft5x06的i2c信息,与ft5x06.c驱动文件匹配。代码如下:
static struct i2c_board_info mxc_i2c1_board_info[] __initdata = {
{
I2C_BOARD_INFO("ft5x0x_ts", 0x38),//touch screen i2c2
},
};
然后添加头文件中的引脚信息:
MX6Q_PAD_CSI0_DAT12__GPIO_5_30,//lcd touch screen INT
MX6Q_PAD_CSI0_DAT13__GPIO_5_31,//lcd touch screen rest
在板级文件中的代码就写好了,主要是配置一下两个引脚,使之正常工作。
在ft5x06.c驱动文件中做如下修改:
添加:
#define GPIO_TO_PIN(bank, gpio) (32 * (bank-1) + (gpio))
#define GPIO5_30 GPIO_TO_PIN(5, 30)
#define GPIO5_31 GPIO_TO_PIN(5, 31)
#define GPIO_INT GPIO5_30
#define GPIO_RESET GPIO5_31
#define ATTB GPIO_INT
#define get_attb_value gpio_get_value
#define RESETPIN_SET0 gpio_direction_output(GPIO_RESET,0)
#define RESETPIN_SET1 gpio_direction_output(GPIO_RESET,1)
#define RESETPIN_REQUEST gpio_request(GPIO_RESET, "GPIO_RESET")
#define RESETPIN_FREE gpio_free(GPIO_RESET)
在下面用到了复位和中断引脚,在这里需要配置一下,也可以在板级文件中定义,然后在驱动i代码中引用一下。
ft5x06.c实现代码如下:
/*
* drivers/input/touchscreen/ft5x06_ts.c
*
* FocalTech ft5x06 TouchScreen driver.
*
* Copyright (c) 2010 Focal tech Ltd.
*
* This software is licensed under the terms of the GNU General Public
* License version 2, as published by the Free Software Foundation, and
* may be copied, distributed, and modified under those terms.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* VERSION DATE AUTHOR
* 1.0 2010-01-05 WenFS
*
* note: only support mulititouch Wenfs 2010-10-01
*/
#include <linux/slab.h>
#include <linux/module.h>
#include <linux/i2c.h>
#include <linux/input.h>
#include "ft5x06_ts.h"
#include <linux/earlysuspend.h>
#include <linux/interrupt.h>
#include <linux/delay.h>
//#include <asm/jzsoc.h>
#include <mach/gpio.h>
#include <linux/gpio.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#define GPIO_TO_PIN(bank, gpio) (32 * (bank-1) + (gpio))
#define GPIO5_30 GPIO_TO_PIN(5, 30)
#define GPIO5_31 GPIO_TO_PIN(5, 31)
#define GPIO_INT GPIO5_30
#define GPIO_RESET GPIO5_31
#define ATTB GPIO_INT
#define get_attb_value gpio_get_value
#define RESETPIN_SET0 gpio_direction_output(GPIO_RESET,0)
#define RESETPIN_SET1 gpio_direction_output(GPIO_RESET,1)
#define RESETPIN_REQUEST gpio_request(GPIO_RESET, "GPIO_RESET")
#define RESETPIN_FREE gpio_free(GPIO_RESET)
static struct i2c_client *this_client;
static struct ft5x06_ts_platform_data *pdata;
//#define CONFIG_FT5X06_MULTITOUCH 1
struct ts_event {
u16 x1;
u16 y1;
u16 x2;
u16 y2;
u16 x3;
u16 y3;
u16 x4;
u16 y4;
u16 x5;
u16 y5;
u16 pressure;
u8 touch_point;
};
struct ft5x06_ts_data {
struct input_dev *input_dev;
struct ts_event event;
struct work_struct pen_event_work;
struct workqueue_struct *ts_workqueue;
struct early_suspend early_suspend;
};
/***********************************************************************************************
Name : ft5x06_i2c_rxdata
Input : *rxdata
*length
Output : ret
function :
***********************************************************************************************/
static int ft5x06_i2c_rxdata(char *rxdata, int length)
{
int ret;
printk("========ft5x06_i2c_rxdata========\n");
struct i2c_msg msgs[] = {
{
.addr = this_client->addr,
.flags = 0,
.len = 1,
.buf = rxdata,
},
{
.addr = this_client->addr,
.flags = I2C_M_RD,
.len = length,
.buf = rxdata,
},
};
//msleep(1);
ret = i2c_transfer(this_client->adapter, msgs, 2);
if (ret < 0)
pr_err("msg %s i2c read error: %d\n", __func__, ret);
return ret;
}
/***********************************************************************************************
Name :
Input :
Output :
function :
***********************************************************************************************/
static int ft5x06_i2c_txdata(char *txdata, int length)
{
//printk("Step 2\n");
int ret;
struct i2c_msg msg[] = {
{
.addr = this_client->addr,
.flags = 0,
.len = length,
.buf = txdata,
},
};
//msleep(1);
ret = i2c_transfer(this_client->adapter, msg, 1);
if (ret < 0)
pr_err("%s i2c write error: %d\n", __func__, ret);
return ret;
}
/***********************************************************************************************
Name : ft5x06_write_reg
Input : addr -- address
para -- parameter
Output :
function : write register of ft5x06
***********************************************************************************************/
static int ft5x06_write_reg(u8 addr, u8 para)
{
//printk("Step 3\n");
u8 buf[3];
int ret = -1;
buf[0] = addr;
buf[1] = para;
ret = ft5x06_i2c_txdata(buf, 2);
if (ret < 0) {
pr_err("write reg failed! %#x ret: %d", buf[0], ret);
return -1;
}
return 0;
}
/***********************************************************************************************
Name : ft5x06_read_reg
Input : addr
pdata
Output :
function : read register of ft5x06
***********************************************************************************************/
static int ft5x06_read_reg(u8 addr, u8 *pdata)
{
//printk("Step 4\n");
int ret;
u8 buf[2] = {0};
buf[0] = addr;
struct i2c_msg msgs[] = {
{
.addr = this_client->addr,
.flags = 0,
.len = 1,
.buf = buf,
},
{
.addr = this_client->addr,
.flags = I2C_M_RD,
.len = 1,
.buf = buf,
},
};
//msleep(1);
ret = i2c_transfer(this_client->adapter, msgs, 2);
if (ret < 0)
pr_err("msg %s i2c read error: %d\n", __func__, ret);
*pdata = buf[0];
return ret;
}
/***********************************************************************************************
Name : ft5x06_read_fw_ver
Input : void
4000
Output : firmware version
function : read TP firmware version
***********************************************************************************************/
static unsigned char ft5x06_read_fw_ver(void)
{
//printk("Step 5\n");
unsigned char ver;
ft5x06_read_reg(FT5X0X_REG_FIRMID, &ver);
return(ver);
}
#define CONFIG_SUPPORT_FTS_CTP_UPG
#ifdef CONFIG_SUPPORT_FTS_CTP_UPG
typedef enum
{
ERR_OK,
ERR_MODE,
ERR_READID,
ERR_ERASE,
ERR_STATUS,
ERR_ECC,
ERR_DL_ERASE_FAIL,
ERR_DL_PROGRAM_FAIL,
ERR_DL_VERIFY_FAIL
}E_UPGRADE_ERR_TYPE;
typedef unsigned char FTS_BYTE; //8 bit
typedef unsigned short FTS_WORD; //16 bit
typedef unsigned int FTS_DWRD; //16 bit
typedef unsigned char FTS_BOOL; //8 bit
#define FTS_NULL 0x0
#define FTS_TRUE 0x01
#define FTS_FALSE 0x0
#define I2C_CTPM_ADDRESS 0x70
void delay_qt_ms(unsigned long w_ms)
{
//printk("Step 6\n");
unsigned long i;
unsigned long j;
for (i = 0; i < w_ms; i++)
{
for (j = 0; j < 1000; j++)
{
udelay(1);
}
}
}
/*
[function]:
callback: read data from ctpm by i2c interface,implemented by special user;
[parameters]:
bt_ctpm_addr[in] :the address of the ctpm;
pbt_buf[out] :data buffer;
dw_lenth[in] :the length of the data buffer;
[return]:
FTS_TRUE :success;
FTS_FALSE :fail;
*/
FTS_BOOL i2c_read_interface(FTS_BYTE bt_ctpm_addr, FTS_BYTE* pbt_buf, FTS_DWRD dw_lenth)
{
int ret;
ret=i2c_master_recv(this_client, pbt_buf, dw_lenth);
if(ret<=0)
{
//printk("[TSP]i2c_read_interface error\n");
return FTS_FALSE;
}
return FTS_TRUE;
}
/*
[function]:
callback: write data to ctpm by i2c interface,implemented by special user;
[parameters]:
bt_ctpm_addr[in] :the address of the ctpm;
pbt_buf[in] :data buffer;
dw_lenth[in] :the length of the data buffer;
[return]:
FTS_TRUE :success;
FTS_FALSE :fail;
*/
FTS_BOOL i2c_write_interface(FTS_BYTE bt_ctpm_addr, FTS_BYTE* pbt_buf, FTS_DWRD dw_lenth)
{
int ret;
ret=i2c_master_send(this_client, pbt_buf, dw_lenth);
if(ret<=0)
{
//printk("[TSP]i2c_write_interface error line = %d, ret = %d\n", __LINE__, ret);
return FTS_FALSE;
}
return FTS_TRUE;
}
/*
[function]:
send a command to ctpm.
[parameters]:
btcmd[in] :command code;
btPara1[in] :parameter 1;
btPara2[in] :parameter 2;
btPara3[in] :parameter 3;
num[in] :the valid input parameter numbers, if only command code needed and no parameters followed,then the num is 1;
[return]:
FTS_TRUE :success;
FTS_FALSE :io fail;
*/
FTS_BOOL cmd_write(FTS_BYTE btcmd,FTS_BYTE btPara1,FTS_BYTE btPara2,FTS_BYTE btPara3,FTS_BYTE num)
{
FTS_BYTE write_cmd[4] = {0};
write_cmd[0] = btcmd;
write_cmd[1] = btPara1;
write_cmd[2] = btPara2;
write_cmd[3] = btPara3;
return i2c_write_interface(I2C_CTPM_ADDRESS, write_cmd, num);
}
/*
[function]:
write data to ctpm , the destination address is 0.
[parameters]:
pbt_buf[in] :point to data buffer;
bt_len[in] :the data numbers;
[return]:
FTS_TRUE :success;
FTS_FALSE :io fail;
*/
FTS_BOOL byte_write(FTS_BYTE* pbt_buf, FTS_DWRD dw_len)
{
return i2c_write_interface(I2C_CTPM_ADDRESS, pbt_buf, dw_len);
}
/*
[function]:
read out data from ctpm,the destination address is 0.
[parameters]:
pbt_buf[out] :point to data buffer;
bt_len[in] :the data numbers;
[return]:
FTS_TRUE :success;
FTS_FALSE :io fail;
*/
FTS_BOOL byte_read(FTS_BYTE* pbt_buf, FTS_BYTE bt_len)
{
return i2c_read_interface(I2C_CTPM_ADDRESS, pbt_buf, bt_len);
}
/*
[function]:
burn the FW to ctpm.
[parameters]:(ref. SPEC)
pbt_buf[in] :point to Head+FW ;
dw_lenth[in]:the length of the FW + 6(the Head length);
bt_ecc[in] :the ECC of the FW
[return]:
ERR_OK :no error;
ERR_MODE :fail to switch to UPDATE mode;
ERR_READID :read id fail;
ERR_ERASE :erase chip fail;
ERR_STATUS :status error;
ERR_ECC :ecc error.
*/
#define FTS_PACKET_LENGTH 128
static unsigned char CTPM_FW[]=
{
#define FT_UPDATE_FIRMWARE_FILENAME "ft070101_app_1118.i"
};
E_UPGRADE_ERR_TYPE fts_ctpm_fw_upgrade(FTS_BYTE* pbt_buf, FTS_DWRD dw_lenth)
{
FTS_BYTE reg_val[2] = {0};
FTS_DWRD i = 0;
FTS_DWRD packet_number;
FTS_DWRD j;
FTS_DWRD temp;
FTS_DWRD lenght;
FTS_BYTE packet_buf[FTS_PACKET_LENGTH + 6];
FTS_BYTE auc_i2c_write_buf[10];
FTS_BYTE bt_ecc;
int i_ret;
/*********Step 1:Reset CTPM *****/
/*write 0xaa to register 0xfc*/
ft5x06_write_reg(0xfc,0xaa);
delay_qt_ms(50);
/*write 0x55 to register 0xfc*/
ft5x06_write_reg(0xfc,0x55);
//printk("[TSP] Step 1: Reset CTPM test\n");
delay_qt_ms(30);
/*********Step 2:Enter upgrade mode *****/
auc_i2c_write_buf[0] = 0x55;
auc_i2c_write_buf[1] = 0xaa;
do
{
i ++;
i_ret = ft5x06_i2c_txdata(auc_i2c_write_buf, 2);
delay_qt_ms(5);
}while(i_ret <= 0 && i < 5 );
/*********Step 3:check READ-ID***********************/
cmd_write(0x90,0x00,0x00,0x00,4);
byte_read(reg_val,2);
if (reg_val[0] == 0x79 && reg_val[1] == 0x3)
{
//printk("[TSP] Step 3: CTPM ID,ID1 = 0x%x,ID2 = 0x%x\n",reg_val[0],reg_val[1]);
}
else
{
return ERR_READID;
//i_is_new_protocol = 1;
}
/*********Step 4:erase app*******************************/
cmd_write(0x61,0x00,0x00,0x00,1);
delay_qt_ms(1500);
//printk("[TSP] Step 4: erase. \n");
/*********Step 5:write firmware(FW) to ctpm flash*********/
bt_ecc = 0;
//printk("[TSP] Step 5: start upgrade. \n");
dw_lenth = dw_lenth - 8;
packet_number = (dw_lenth) / FTS_PACKET_LENGTH;
packet_buf[0] = 0xbf;
packet_buf[1] = 0x00;
for (j=0;j<packet_number;j++)
{
temp = j * FTS_PACKET_LENGTH;
packet_buf[2] = (FTS_BYTE)(temp>>8);
packet_buf[3] = (FTS_BYTE)temp;
lenght = FTS_PACKET_LENGTH;
packet_buf[4] = (FTS_BYTE)(lenght>>8);
packet_buf[5] = (FTS_BYTE)lenght;
for (i=0;i<FTS_PACKET_LENGTH;i++)
{
packet_buf[6+i] = pbt_buf[j*FTS_PACKET_LENGTH + i];
bt_ecc ^= packet_buf[6+i];
}
byte_write(&packet_buf[0],FTS_PACKET_LENGTH + 6);
delay_qt_ms(FTS_PACKET_LENGTH/6 + 1);
if ((j * FTS_PACKET_LENGTH % 1024) == 0)
{
//printk("[TSP] upgrade the 0x%x th byte.\n", ((unsigned int)j) * FTS_PACKET_LENGTH);
}
}
if ((dw_lenth) % FTS_PACKET_LENGTH > 0)
{
temp = packet_number * FTS_PACKET_LENGTH;
packet_buf[2] = (FTS_BYTE)(temp>>8);
packet_buf[3] = (FTS_BYTE)temp;
temp = (dw_lenth) % FTS_PACKET_LENGTH;
packet_buf[4] = (FTS_BYTE)(temp>>8);
packet_buf[5] = (FTS_BYTE)temp;
for (i=0;i<temp;i++)
{
packet_buf[6+i] = pbt_buf[ packet_number*FTS_PACKET_LENGTH + i];
bt_ecc ^= packet_buf[6+i];
}
byte_write(&packet_buf[0],temp+6);
delay_qt_ms(20);
}
//send the last six byte
for (i = 0; i<6; i++)
{
temp = 0x6ffa + i;
packet_buf[2] = (FTS_BYTE)(temp>>8);
packet_buf[3] = (FTS_BYTE)temp;
temp =1;
packet_buf[4] = (FTS_BYTE)(temp>>8);
packet_buf[5] = (FTS_BYTE)temp;
packet_buf[6] = pbt_buf[ dw_lenth + i];
bt_ecc ^= packet_buf[6];
byte_write(&packet_buf[0],7);
delay_qt_ms(20);
}
/*********Step 6: read out checksum***********************/
/*send the opration head*/
cmd_write(0xcc,0x00,0x00,0x00,1);
byte_read(reg_val,1);
//printk("[TSP] Step 6: ecc read 0x%x, new firmware 0x%x. \n", reg_val[0], bt_ecc);
if(reg_val[0] != bt_ecc)
{
return ERR_ECC;
}
/*********Step 7: reset the new FW***********************/
cmd_write(0x07,0x00,0x00,0x00,1);
return ERR_OK;
}
int fts_ctpm_fw_upgrade_with_i_file(void)
{
//printk("Step 7\n");
FTS_BYTE* pbt_buf = FTS_NULL;
int i_ret;
//=========FW upgrade========================*/
pbt_buf = CTPM_FW;
/*call the upgrade function*/
i_ret = fts_ctpm_fw_upgrade(pbt_buf,sizeof(CTPM_FW));
if (i_ret != 0)
{
//error handling ...
//TBD
}
return i_ret;
}
unsigned char fts_ctpm_get_upg_ver(void)
{
//printk("Step 8\n");
unsigned int ui_sz;
ui_sz = sizeof(CTPM_FW);
if (ui_sz > 2)
{
return CTPM_FW[ui_sz - 2];
}
else
{
//TBD, error handling?
return 0xff; //default value
}
}
#endif
/***********************************************************************************************
Name :
Input :
Output :
function :
***********************************************************************************************/
static void ft5x06_ts_release(void)
{
//printk("Step 9\n");
struct ft5x06_ts_data *data = i2c_get_clientdata(this_client);
#ifdef CONFIG_FT5X06_MULTITOUCH
input_report_abs(data->input_dev, ABS_MT_TOUCH_MAJOR, 0);
#else
input_report_abs(data->input_dev, ABS_PRESSURE, 0);
input_report_key(data->input_dev, BTN_TOUCH, 0);
#endif
input_sync(data->input_dev);
}
static int ft5x06_read_data(void)
{
//printk("Step 10\n");
struct ft5x06_ts_data *data = i2c_get_clientdata(this_client);
struct ts_event *event = &data->event;
// u8 buf[14] = {0};
u8 buf[32] = {0};
int ret = -1;
printk("===========ft5x0x start read data============\n");
#ifdef CONFIG_FT5X06_MULTITOUCH
// ret = ft5x06_i2c_rxdata(buf, 13);
ret = ft5x06_i2c_rxdata(buf, 31);
#else
ret = ft5x06_i2c_rxdata(buf, 7);
#endif
if (ret < 0) {
printk("%s read_data i2c_rxdata failed: %d\n", __func__, ret);
return ret;
}
memset(event, 0, sizeof(struct ts_event));
// event->touch_point = buf[2] & 0x03;// 0000 0011
event->touch_point = buf[2] & 0x07;// 000 0111
if (event->touch_point == 0) {
ft5x06_ts_release();
return 1;
}
#ifdef CONFIG_FT5X06_MULTITOUCH
switch (event->touch_point) {
case 5:
event->x5 = (s16)(buf[0x1b] & 0x0F)<<8 | (s16)buf[0x1c];
event->y5 = (s16)(buf[0x1d] & 0x0F)<<8 | (s16)buf[0x1e];
case 4:
event->x4 = (s16)(buf[0x15] & 0x0F)<<8 | (s16)buf[0x16];
event->y4 = (s16)(buf[0x17] & 0x0F)<<8 | (s16)buf[0x18];
case 3:
event->x3 = (s16)(buf[0x0f] & 0x0F)<<8 | (s16)buf[0x10];
event->y3 = (s16)(buf[0x11] & 0x0F)<<8 | (s16)buf[0x12];
case 2:
event->x2 = (s16)(buf[9] & 0x0F)<<8 | (s16)buf[10];
event->y2 = (s16)(buf[11] & 0x0F)<<8 | (s16)buf[12];
case 1:
event->x1 = (s16)(buf[3] & 0x0F)<<8 | (s16)buf[4];
event->y1 = (s16)(buf[5] & 0x0F)<<8 | (s16)buf[6];
break;
default:
return -1;
}
#else
if (event->touch_point == 1) {
event->x1 = (s16)(buf[3] & 0x0F)<<8 | (s16)buf[4];
event->y1 = (s16)(buf[5] & 0x0F)<<8 | (s16)buf[6];
}
#endif
event->pressure = 200;
dev_dbg(&this_client->dev, "%s: 1:%d %d 2:%d %d \n", __func__,
event->x1, event->y1, event->x2, event->y2);
////printk("%d (%d, %d), (%d, %d)\n", event->touch_point, event->x1, event->y1, event->x2, event->y2);
printk("===========ft5x0x read datav over!!============\n");
return 0;
}
/***********************************************************************************************
Name :
Input :
Output :
function :
***********************************************************************************************/
static void ft5x06_report_value(void)
{
struct ft5x06_ts_data *data = i2c_get_clientdata(this_client);
struct ts_event *event = &data->event;
u8 uVersion;
// printk("==ft5x06_report_value =\n");
#ifdef CONFIG_FT5X06_MULTITOUCH
switch(event->touch_point) {
case 5:
input_report_abs(data->input_dev, ABS_MT_TOUCH_MAJOR, event->pressure);
input_report_abs(data->input_dev, ABS_MT_POSITION_X, event->x5);
input_report_abs(data->input_dev, ABS_MT_POSITION_Y, event->y5);
//input_report_abs(data->input_dev, ABS_MT_WIDTH_MAJOR, 1);
input_mt_sync(data->input_dev);
printk("===x5 = %d,y5 = %d ====\n",event->x5,event->y5);
case 4:
input_report_abs(data->input_dev, ABS_MT_TOUCH_MAJOR, event->pressure);
input_report_abs(data->input_dev, ABS_MT_POSITION_X, event->x4);
input_report_abs(data->input_dev, ABS_MT_POSITION_Y, event->y4);
//input_report_abs(data->input_dev, ABS_MT_WIDTH_MAJOR, 1);
input_mt_sync(data->input_dev);
printk("===x4 = %d,y4 = %d ====\n",event->x4,event->y4);
case 3:
input_report_abs(data->input_dev, ABS_MT_TOUCH_MAJOR, event->pressure);
input_report_abs(data->input_dev, ABS_MT_POSITION_X, event->x3);
input_report_abs(data->input_dev, ABS_MT_POSITION_Y, event->y3);
//input_report_abs(data->input_dev, ABS_MT_WIDTH_MAJOR, 1);
input_mt_sync(data->input_dev);
printk("===x3 = %d,y3 = %d ====\n",event->x3,event->y3);
case 2:
input_report_abs(data->input_dev, ABS_MT_TOUCH_MAJOR, event->pressure);
input_report_abs(data->input_dev, ABS_MT_POSITION_X, event->x2);
input_report_abs(data->input_dev, ABS_MT_POSITION_Y, event->y2);
//input_report_abs(data->input_dev, ABS_MT_WIDTH_MAJOR, 1);
input_mt_sync(data->input_dev);
printk("===x2 = %d,y2 = %d ====\n",event->x2,event->y2);
case 1:
input_report_abs(data->input_dev, ABS_MT_SLOT, 0);
input_report_abs(data->input_dev, ABS_MT_TRACKING_ID, 45);
//input_report_abs(data->input_dev, ABS_MT_TOUCH_MAJOR, event->pressure);
input_report_abs(data->input_dev, ABS_MT_POSITION_X, event->x1);
input_report_abs(data->input_dev, ABS_MT_POSITION_Y, event->y1);
//input_report_abs(data->input_dev, ABS_MT_WIDTH_MAJOR, 1);
//input_mt_sync(data->input_dev);
input_report_abs(data->input_dev, ABS_MT_TRACKING_ID, -1);
input_sync(data->input_dev);
//input_syn_report(data->input_dev);
printk("===x1 = %d,y1 = %d ====\n",event->x1,event->y1);
default:
printk("==touch_point default =\n");
break;
}
#else /* CONFIG_FT5X06_MULTITOUCH*/
if (event->touch_point == 1) {
// printk("===x1 = %d,y1 = %d ====\n",event->x1,event->y1);
input_report_abs(data->input_dev, ABS_X, event->x1);
input_report_abs(data->input_dev, ABS_Y, 600-event->y1);
input_report_abs(data->input_dev, ABS_PRESSURE, event->pressure);
}
input_report_key(data->input_dev, BTN_TOUCH, 1);
#endif /* CONFIG_FT5X06_MULTITOUCH*/
input_sync(data->input_dev);
dev_dbg(&this_client->dev, "%s: 1:%d %d 2:%d %d \n", __func__,
event->x1, event->y1, event->x2, event->y2);
} /*end ft5x06_report_value*/
/***********************************************************************************************
Name :
Input :
Output :
function :
***********************************************************************************************/
static void ft5x06_ts_pen_irq_work(struct work_struct *work)
{
//printk("Step 12\n");
int ret = -1;
//printk("==work 1=\n");
ret = ft5x06_read_data();
if (ret == 0) {
ft5x06_report_value();
}
else //printk("data package read error\n");
//printk("==work 2=\n");
msleep(1);
// enable_irq(this_client->irq);
// enable_irq(this_client->irq);
}
/***********************************************************************************************
Name :
Input :
Output :
function :
*****************************************************************************************
d6db
******/
static irqreturn_t ft5x06_ts_interrupt(int irq, void *dev_id)
{
struct ft5x06_ts_data *ft5x06_ts = dev_id;
//disable_irq_nosync_lockdep
//disable_irq_lockdep
//disable_irq_nosync_lockdep(this_client->irq);
//disable_irq(ft5x06_ts->this_client->irq);
//printk("Step 13.b\n");
////printk("Disable IRQ 2\n");
//disable_irq(190);
//disable_irq_lockdep(this_client->irq);
// //printk("==int=\n");
//printk("Step 13.c\n");
if (!work_pending(&ft5x06_ts->pen_event_work)) {
//printk("Step 13.d\n");
queue_work(ft5x06_ts->ts_workqueue, &ft5x06_ts->pen_event_work);
//printk("Step 13.e\n");
}
//printk("Step 13.f\n");
return IRQ_HANDLED;
}
#ifdef CONFIG_HAS_EARLYSUSPEND
/***********************************************************************************************
Name :
Input :
Output :
function :
***********************************************************************************************/
static void ft5x06_ts_suspend(struct early_suspend *handler)
{
//printk("Step 14\n");
// struct ft5x06_ts_data *ts;
// ts = container_of(handler, struct ft5x06_ts_data, early_suspend);
//printk("==ft5x06_ts_suspend=\n");
// disable_irq(this_client->irq);
// disable_irq(this_client->irq);
// cancel_work_sync(&ts->pen_event_work);
// flush_workqueue(ts->ts_workqueue);
// ==set mode ==,
// ft5x06_set_reg(FT5X06_REG_PMODE, PMODE_HIBERNATE);
}
/***********************************************************************************************
Name :
Input :
Output :
function :
***********************************************************************************************/
static void ft5x06_ts_resume(struct early_suspend *handler)
{
//printk("Step 15\n");
//printk("==ft5x06_ts_resume=\n");
// wake the mode
// __gpio_as_output(GPIO_FT5X06_WAKE);
// __gpio_clear_pin(GPIO_FT5X06_WAKE); //set wake = 0,base on system
// msleep(100);
// __gpio_set_pin(GPIO_FT5X06_WAKE); //set wake = 1,base on system
// msleep(100);
// enable_irq(this_client->irq);
// enable_irq(this_client->irq);
}
#endif //CONFIG_HAS_EARLYSUSPEND
/***********************************************************************************************
Name :
Input :
Output :
function :
***********************************************************************************************/
static int
ft5x06_ts_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
//printk("Step 16\n");
struct ft5x06_ts_data *ft5x06_ts;
struct input_dev *input_dev;
int err = 0;
unsigned char uc_reg_value;
//printk("==ft5x06_ts_probe=\n");
RESETPIN_REQUEST;
RESETPIN_SET1;
//mdelay(1000);
gpio_set_value(GPIO_RESET,0);
// printk("GPIO1_14 is %d \n ", gpio_get_value(GPIO1_14));
mdelay(50);
gpio_set_value(GPIO_RESET,1);
mdelay(100);
// printk("GPIO1_14 is %d \n ", gpio_get_value(GPIO1_14));
if (!i2c_check_functionality(client->adapter, I2C_FUNC_I2C)) {
err = -ENODEV;
goto exit_check_functionality_failed;
}
//printk("==kzalloc=\n");
ft5x06_ts = kzalloc(sizeof(*ft5x06_ts), GFP_KERNEL);
if (!ft5x06_ts) {
err = -ENOMEM;
goto exit_alloc_data_failed;
}
this_client = client;
i2c_set_clientdata(client, ft5x06_ts);
INIT_WORK(&ft5x06_ts->pen_event_work, ft5x06_ts_pen_irq_work);
ft5x06_ts->ts_workqueue = create_singlethread_workqueue(dev_name(&client->dev));
if (!ft5x06_ts->ts_workqueue) {
err = -ESRCH;
goto exit_create_singlethread;
}
// pdata = client->dev.platform_data;
// if (pdata == NULL) {
// dev_err(&client->dev, "%s: platform data is null\n", __func__);
// goto exit_platform_data_null;
// }
// //printk("==request_irq=\n");
// err = request_irq(client->irq, ft5x06_ts_interrupt, IRQF_DISABLED, "ft5x06_ts", ft5x06_ts);
this_client->irq = gpio_to_irq(GPIO_INT);
if (this_client->irq < 0)
{
printk("Unable to get irq number for GPIO_NUM\n");
goto exit_irq_request_failed;
}
err = request_irq(this_client->irq, ft5x06_ts_interrupt, IRQF_TRIGGER_FALLING, "ft5x06_ts", ft5x06_ts);
if (err < 0) {
dev_err(&client->dev, "ft5x06_probe: request irq failed\n");
goto exit_irq_request_failed;
}
printk(">>>>>>>>>>>>>request_irq\n");
// __gpio_as_irq_fall_edge(pdata->intr); //
// disable_irq(this_client->irq);
//printk("Disable IRQ 1\n");
disable_irq(this_client->irq);
input_dev = input_allocate_device();
if (!input_dev) {
err = -ENOMEM;
dev_err(&client->dev, "failed to allocate input device\n");
goto exit_input_dev_alloc_failed;
}
// printk("==input_allocate_device=\n");
ft5x06_ts->input_dev = input_dev;
#ifdef CONFIG_FT5X06_MULTITOUCH
set_bit(ABS_MT_TOUCH_MAJOR, input_dev->absbit);
set_bit(ABS_MT_POSITION_X, input_dev->absbit);
set_bit(ABS_MT_POSITION_Y, input_dev->absbit);
set_bit(ABS_MT_WIDTH_MAJOR, input_dev->absbit);
input_set_abs_params(input_dev,
ABS_MT_POSITION_X, 0, SCREEN_MAX_X, 0, 0);
input_set_abs_params(input_dev,
ABS_MT_POSITION_Y, 0, SCREEN_MAX_Y, 0, 0);
input_set_abs_params(input_dev,
ABS_MT_TOUCH_MAJOR, 0, PRESS_MAX, 0, 0);
input_set_abs_params(input_dev,
ABS_MT_WIDTH_MAJOR, 0, 200, 0, 0);
// printk("==> ABS_MT_POSITION_X = %x\n",ABS_MT_POSITION_X);
// printk("==> ABS_MT_POSITION_Y = %x\n",ABS_MT_POSITION_Y);
// printk("==> ABS_MT_TOUCH_MAJOR = %x\n",ABS_MT_TOUCH_MAJOR);
// printk("==> ABS_MT_WIDTH_MAJOR = %x\n",ABS_MT_WIDTH_MAJOR);
#else
set_bit(ABS_X, input_dev->absbit);
set_bit(ABS_Y, input_dev->absbit);
set_bit(ABS_PRESSURE, input_dev->absbit);
set_bit(BTN_TOUCH, input_dev->keybit);
input_set_abs_params(input_dev, ABS_X, 0, SCREEN_MAX_X, 0, 0);
input_set_abs_params(input_dev, ABS_Y, 0, SCREEN_MAX_Y, 0, 0);
input_set_abs_params(input_dev,
ABS_PRESSURE, 0, PRESS_MAX, 0 , 0);
#endif
set_bit(EV_ABS, input_dev->evbit);
set_bit(EV_KEY, input_dev->evbit);
input_dev->name = FT5X0X_NAME; //dev_name(&client->dev)
err = input_register_device(input_dev);
if (err) {
dev_err(&client->dev,
"ft5x06_ts_probe: failed to register input device: %s\n",
dev_name(&client->dev));
goto exit_input_register_device_failed;
}
#ifdef CONFIG_HAS_EARLYSUSPEND
//printk("==register_early_suspend =\n");
ft5x06_ts->early_suspend.level = EARLY_SUSPEND_LEVEL_BLANK_SCREEN + 1;
ft5x06_ts->early_suspend.suspend = ft5x06_ts_suspend;
ft5x06_ts->early_suspend.resume = ft5x06_ts_resume;
register_early_suspend(&ft5x06_ts->early_suspend);
#endif
msleep(50);
//get some register information
uc_reg_value = ft5x06_read_fw_ver();
printk("[FST] Firmware version = 0x%x\n", uc_reg_value);
// fts_ctpm_fw_upgrade_with_i_file();
//wake the CTPM
// __gpio_as_output(GPIO_FT5X06_WAKE);
// __gpio_clear_pin(GPIO_FT5X06_WAKE); //set wake = 0,base on system
// msleep(100);
// __gpio_set_pin(GPIO_FT5X06_WAKE); //set wake = 1,base on system
// msleep(100);
// ft5x06_set_reg(0x88, 0x05); //5, 6,7,8
// ft5x06_set_reg(0x80, 30);
// msleep(50);
// enable_irq(this_client->irq);
enable_irq(this_client->irq);
printk("==probe over =\n");
return 0;
exit_input_register_device_failed:
input_free_device(input_dev);
exit_input_dev_alloc_failed:
// free_irq(client->irq, ft5x06_ts);
free_irq(this_client->irq, ft5x06_ts);
exit_irq_request_failed:
exit_platform_data_null:
cancel_work_sync(&ft5x06_ts->pen_event_work);
destroy_workqueue(ft5x06_ts->ts_workqueue);
exit_create_singlethread:
//printk("==singlethread error =\n");
i2c_set_clientdata(client, NULL);
kfree(ft5x06_ts);
exit_alloc_data_failed:
exit_check_functionality_failed:
return err;
}
/***********************************************************************************************
Name :
Input :
Output :
function :
***********************************************************************************************/
static int __devexit ft5x06_ts_remove(struct i2c_client *client)
{
//printk("Step 17\n");
//printk("==ft5x06_ts_remove=\n");
struct ft5x06_ts_data *ft5x06_ts = i2c_get_clientdata(client);
unregister_early_suspend(&ft5x06_ts->early_suspend);
// free_irq(client->irq, ft5x06_ts);
free_irq(this_client->irq, ft5x06_ts);
gpio_free(GPIO_RESET);
input_unregister_device(ft5x06_ts->input_dev);
kfree(ft5x06_ts);
cancel_work_sync(&ft5x06_ts->pen_event_work);
destroy_workqueue(ft5x06_ts->ts_workqueue);
i2c_set_clientdata(client, NULL);
return 0;
}
static const struct i2c_device_id ft5x06_ts_id[] = {
{ FT5X0X_NAME, 0 },{ }
};
MODULE_DEVICE_TABLE(i2c, ft5x06_ts_id);
static struct i2c_driver ft5x06_ts_driver = {
.probe = ft5x06_ts_probe,
.remove = __devexit_p(ft5x06_ts_remove),
.id_table = ft5x06_ts_id,
.driver = {
.name = FT5X0X_NAME,
.owner = THIS_MODULE,
},
};
/***********************************************************************************************
Name :
Input :
Output :
function :
***********************************************************************************************/
static int __init ft5x06_ts_init(void)
{
//printk("Step 18\n");
int ret;
printk("==ft5x06_ts_init==\n");
ret = i2c_add_driver(&ft5x06_ts_driver);
//printk("ret=%d\n",ret);
return ret;
// return i2c_add_driver(&ft5x06_ts_driver);
}
/***********************************************************************************************
Name :
Input :
Output :
function :
***********************************************************************************************/
static void __exit ft5x06_ts_exit(void)
{
//printk("Step 19\n");
//printk("==ft5x06_ts_exit==\n");
i2c_del_driver(&ft5x06_ts_driver);
}
module_init(ft5x06_ts_init);
module_exit(ft5x06_ts_exit);
MODULE_AUTHOR("<wenfs@Focaltech-systems.com>");
MODULE_DESCRIPTION("FocalTech ft5x06 TouchScreen driver");
MODULE_LICENSE("GPL");
如何移植驱动和测试网上都有例程,自行百度。
第一张图是开发板的触摸屏原理图,第二张是显示屏触摸屏接口原理图。对应起来只用到了六个脚,开发板7、8脚不用管。
从开发板触摸屏接口可以看到用到了i2c2_scl、i2c2_sda,RST、INT四个主要的引脚,这里要查看触摸屏接口的GPIO_14/15对应的是RST和INT的哪个脚,具体看核心板原理图。
首先对i2c进行分析。由于内核自带i2c,基本不需要做修改,我们需要在板级文件中注册触摸屏ft5x06的i2c信息,与ft5x06.c驱动文件匹配。代码如下:
static struct i2c_board_info mxc_i2c1_board_info[] __initdata = {
{
I2C_BOARD_INFO("ft5x0x_ts", 0x38),//touch screen i2c2
},
};
然后添加头文件中的引脚信息:
MX6Q_PAD_CSI0_DAT12__GPIO_5_30,//lcd touch screen INT
MX6Q_PAD_CSI0_DAT13__GPIO_5_31,//lcd touch screen rest
在板级文件中的代码就写好了,主要是配置一下两个引脚,使之正常工作。
在ft5x06.c驱动文件中做如下修改:
添加:
#define GPIO_TO_PIN(bank, gpio) (32 * (bank-1) + (gpio))
#define GPIO5_30 GPIO_TO_PIN(5, 30)
#define GPIO5_31 GPIO_TO_PIN(5, 31)
#define GPIO_INT GPIO5_30
#define GPIO_RESET GPIO5_31
#define ATTB GPIO_INT
#define get_attb_value gpio_get_value
#define RESETPIN_SET0 gpio_direction_output(GPIO_RESET,0)
#define RESETPIN_SET1 gpio_direction_output(GPIO_RESET,1)
#define RESETPIN_REQUEST gpio_request(GPIO_RESET, "GPIO_RESET")
#define RESETPIN_FREE gpio_free(GPIO_RESET)
在下面用到了复位和中断引脚,在这里需要配置一下,也可以在板级文件中定义,然后在驱动i代码中引用一下。
ft5x06.c实现代码如下:
/*
* drivers/input/touchscreen/ft5x06_ts.c
*
* FocalTech ft5x06 TouchScreen driver.
*
* Copyright (c) 2010 Focal tech Ltd.
*
* This software is licensed under the terms of the GNU General Public
* License version 2, as published by the Free Software Foundation, and
* may be copied, distributed, and modified under those terms.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* VERSION DATE AUTHOR
* 1.0 2010-01-05 WenFS
*
* note: only support mulititouch Wenfs 2010-10-01
*/
#include <linux/slab.h>
#include <linux/module.h>
#include <linux/i2c.h>
#include <linux/input.h>
#include "ft5x06_ts.h"
#include <linux/earlysuspend.h>
#include <linux/interrupt.h>
#include <linux/delay.h>
//#include <asm/jzsoc.h>
#include <mach/gpio.h>
#include <linux/gpio.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#define GPIO_TO_PIN(bank, gpio) (32 * (bank-1) + (gpio))
#define GPIO5_30 GPIO_TO_PIN(5, 30)
#define GPIO5_31 GPIO_TO_PIN(5, 31)
#define GPIO_INT GPIO5_30
#define GPIO_RESET GPIO5_31
#define ATTB GPIO_INT
#define get_attb_value gpio_get_value
#define RESETPIN_SET0 gpio_direction_output(GPIO_RESET,0)
#define RESETPIN_SET1 gpio_direction_output(GPIO_RESET,1)
#define RESETPIN_REQUEST gpio_request(GPIO_RESET, "GPIO_RESET")
#define RESETPIN_FREE gpio_free(GPIO_RESET)
static struct i2c_client *this_client;
static struct ft5x06_ts_platform_data *pdata;
//#define CONFIG_FT5X06_MULTITOUCH 1
struct ts_event {
u16 x1;
u16 y1;
u16 x2;
u16 y2;
u16 x3;
u16 y3;
u16 x4;
u16 y4;
u16 x5;
u16 y5;
u16 pressure;
u8 touch_point;
};
struct ft5x06_ts_data {
struct input_dev *input_dev;
struct ts_event event;
struct work_struct pen_event_work;
struct workqueue_struct *ts_workqueue;
struct early_suspend early_suspend;
};
/***********************************************************************************************
Name : ft5x06_i2c_rxdata
Input : *rxdata
*length
Output : ret
function :
***********************************************************************************************/
static int ft5x06_i2c_rxdata(char *rxdata, int length)
{
int ret;
printk("========ft5x06_i2c_rxdata========\n");
struct i2c_msg msgs[] = {
{
.addr = this_client->addr,
.flags = 0,
.len = 1,
.buf = rxdata,
},
{
.addr = this_client->addr,
.flags = I2C_M_RD,
.len = length,
.buf = rxdata,
},
};
//msleep(1);
ret = i2c_transfer(this_client->adapter, msgs, 2);
if (ret < 0)
pr_err("msg %s i2c read error: %d\n", __func__, ret);
return ret;
}
/***********************************************************************************************
Name :
Input :
Output :
function :
***********************************************************************************************/
static int ft5x06_i2c_txdata(char *txdata, int length)
{
//printk("Step 2\n");
int ret;
struct i2c_msg msg[] = {
{
.addr = this_client->addr,
.flags = 0,
.len = length,
.buf = txdata,
},
};
//msleep(1);
ret = i2c_transfer(this_client->adapter, msg, 1);
if (ret < 0)
pr_err("%s i2c write error: %d\n", __func__, ret);
return ret;
}
/***********************************************************************************************
Name : ft5x06_write_reg
Input : addr -- address
para -- parameter
Output :
function : write register of ft5x06
***********************************************************************************************/
static int ft5x06_write_reg(u8 addr, u8 para)
{
//printk("Step 3\n");
u8 buf[3];
int ret = -1;
buf[0] = addr;
buf[1] = para;
ret = ft5x06_i2c_txdata(buf, 2);
if (ret < 0) {
pr_err("write reg failed! %#x ret: %d", buf[0], ret);
return -1;
}
return 0;
}
/***********************************************************************************************
Name : ft5x06_read_reg
Input : addr
pdata
Output :
function : read register of ft5x06
***********************************************************************************************/
static int ft5x06_read_reg(u8 addr, u8 *pdata)
{
//printk("Step 4\n");
int ret;
u8 buf[2] = {0};
buf[0] = addr;
struct i2c_msg msgs[] = {
{
.addr = this_client->addr,
.flags = 0,
.len = 1,
.buf = buf,
},
{
.addr = this_client->addr,
.flags = I2C_M_RD,
.len = 1,
.buf = buf,
},
};
//msleep(1);
ret = i2c_transfer(this_client->adapter, msgs, 2);
if (ret < 0)
pr_err("msg %s i2c read error: %d\n", __func__, ret);
*pdata = buf[0];
return ret;
}
/***********************************************************************************************
Name : ft5x06_read_fw_ver
Input : void
4000
Output : firmware version
function : read TP firmware version
***********************************************************************************************/
static unsigned char ft5x06_read_fw_ver(void)
{
//printk("Step 5\n");
unsigned char ver;
ft5x06_read_reg(FT5X0X_REG_FIRMID, &ver);
return(ver);
}
#define CONFIG_SUPPORT_FTS_CTP_UPG
#ifdef CONFIG_SUPPORT_FTS_CTP_UPG
typedef enum
{
ERR_OK,
ERR_MODE,
ERR_READID,
ERR_ERASE,
ERR_STATUS,
ERR_ECC,
ERR_DL_ERASE_FAIL,
ERR_DL_PROGRAM_FAIL,
ERR_DL_VERIFY_FAIL
}E_UPGRADE_ERR_TYPE;
typedef unsigned char FTS_BYTE; //8 bit
typedef unsigned short FTS_WORD; //16 bit
typedef unsigned int FTS_DWRD; //16 bit
typedef unsigned char FTS_BOOL; //8 bit
#define FTS_NULL 0x0
#define FTS_TRUE 0x01
#define FTS_FALSE 0x0
#define I2C_CTPM_ADDRESS 0x70
void delay_qt_ms(unsigned long w_ms)
{
//printk("Step 6\n");
unsigned long i;
unsigned long j;
for (i = 0; i < w_ms; i++)
{
for (j = 0; j < 1000; j++)
{
udelay(1);
}
}
}
/*
[function]:
callback: read data from ctpm by i2c interface,implemented by special user;
[parameters]:
bt_ctpm_addr[in] :the address of the ctpm;
pbt_buf[out] :data buffer;
dw_lenth[in] :the length of the data buffer;
[return]:
FTS_TRUE :success;
FTS_FALSE :fail;
*/
FTS_BOOL i2c_read_interface(FTS_BYTE bt_ctpm_addr, FTS_BYTE* pbt_buf, FTS_DWRD dw_lenth)
{
int ret;
ret=i2c_master_recv(this_client, pbt_buf, dw_lenth);
if(ret<=0)
{
//printk("[TSP]i2c_read_interface error\n");
return FTS_FALSE;
}
return FTS_TRUE;
}
/*
[function]:
callback: write data to ctpm by i2c interface,implemented by special user;
[parameters]:
bt_ctpm_addr[in] :the address of the ctpm;
pbt_buf[in] :data buffer;
dw_lenth[in] :the length of the data buffer;
[return]:
FTS_TRUE :success;
FTS_FALSE :fail;
*/
FTS_BOOL i2c_write_interface(FTS_BYTE bt_ctpm_addr, FTS_BYTE* pbt_buf, FTS_DWRD dw_lenth)
{
int ret;
ret=i2c_master_send(this_client, pbt_buf, dw_lenth);
if(ret<=0)
{
//printk("[TSP]i2c_write_interface error line = %d, ret = %d\n", __LINE__, ret);
return FTS_FALSE;
}
return FTS_TRUE;
}
/*
[function]:
send a command to ctpm.
[parameters]:
btcmd[in] :command code;
btPara1[in] :parameter 1;
btPara2[in] :parameter 2;
btPara3[in] :parameter 3;
num[in] :the valid input parameter numbers, if only command code needed and no parameters followed,then the num is 1;
[return]:
FTS_TRUE :success;
FTS_FALSE :io fail;
*/
FTS_BOOL cmd_write(FTS_BYTE btcmd,FTS_BYTE btPara1,FTS_BYTE btPara2,FTS_BYTE btPara3,FTS_BYTE num)
{
FTS_BYTE write_cmd[4] = {0};
write_cmd[0] = btcmd;
write_cmd[1] = btPara1;
write_cmd[2] = btPara2;
write_cmd[3] = btPara3;
return i2c_write_interface(I2C_CTPM_ADDRESS, write_cmd, num);
}
/*
[function]:
write data to ctpm , the destination address is 0.
[parameters]:
pbt_buf[in] :point to data buffer;
bt_len[in] :the data numbers;
[return]:
FTS_TRUE :success;
FTS_FALSE :io fail;
*/
FTS_BOOL byte_write(FTS_BYTE* pbt_buf, FTS_DWRD dw_len)
{
return i2c_write_interface(I2C_CTPM_ADDRESS, pbt_buf, dw_len);
}
/*
[function]:
read out data from ctpm,the destination address is 0.
[parameters]:
pbt_buf[out] :point to data buffer;
bt_len[in] :the data numbers;
[return]:
FTS_TRUE :success;
FTS_FALSE :io fail;
*/
FTS_BOOL byte_read(FTS_BYTE* pbt_buf, FTS_BYTE bt_len)
{
return i2c_read_interface(I2C_CTPM_ADDRESS, pbt_buf, bt_len);
}
/*
[function]:
burn the FW to ctpm.
[parameters]:(ref. SPEC)
pbt_buf[in] :point to Head+FW ;
dw_lenth[in]:the length of the FW + 6(the Head length);
bt_ecc[in] :the ECC of the FW
[return]:
ERR_OK :no error;
ERR_MODE :fail to switch to UPDATE mode;
ERR_READID :read id fail;
ERR_ERASE :erase chip fail;
ERR_STATUS :status error;
ERR_ECC :ecc error.
*/
#define FTS_PACKET_LENGTH 128
static unsigned char CTPM_FW[]=
{
#define FT_UPDATE_FIRMWARE_FILENAME "ft070101_app_1118.i"
};
E_UPGRADE_ERR_TYPE fts_ctpm_fw_upgrade(FTS_BYTE* pbt_buf, FTS_DWRD dw_lenth)
{
FTS_BYTE reg_val[2] = {0};
FTS_DWRD i = 0;
FTS_DWRD packet_number;
FTS_DWRD j;
FTS_DWRD temp;
FTS_DWRD lenght;
FTS_BYTE packet_buf[FTS_PACKET_LENGTH + 6];
FTS_BYTE auc_i2c_write_buf[10];
FTS_BYTE bt_ecc;
int i_ret;
/*********Step 1:Reset CTPM *****/
/*write 0xaa to register 0xfc*/
ft5x06_write_reg(0xfc,0xaa);
delay_qt_ms(50);
/*write 0x55 to register 0xfc*/
ft5x06_write_reg(0xfc,0x55);
//printk("[TSP] Step 1: Reset CTPM test\n");
delay_qt_ms(30);
/*********Step 2:Enter upgrade mode *****/
auc_i2c_write_buf[0] = 0x55;
auc_i2c_write_buf[1] = 0xaa;
do
{
i ++;
i_ret = ft5x06_i2c_txdata(auc_i2c_write_buf, 2);
delay_qt_ms(5);
}while(i_ret <= 0 && i < 5 );
/*********Step 3:check READ-ID***********************/
cmd_write(0x90,0x00,0x00,0x00,4);
byte_read(reg_val,2);
if (reg_val[0] == 0x79 && reg_val[1] == 0x3)
{
//printk("[TSP] Step 3: CTPM ID,ID1 = 0x%x,ID2 = 0x%x\n",reg_val[0],reg_val[1]);
}
else
{
return ERR_READID;
//i_is_new_protocol = 1;
}
/*********Step 4:erase app*******************************/
cmd_write(0x61,0x00,0x00,0x00,1);
delay_qt_ms(1500);
//printk("[TSP] Step 4: erase. \n");
/*********Step 5:write firmware(FW) to ctpm flash*********/
bt_ecc = 0;
//printk("[TSP] Step 5: start upgrade. \n");
dw_lenth = dw_lenth - 8;
packet_number = (dw_lenth) / FTS_PACKET_LENGTH;
packet_buf[0] = 0xbf;
packet_buf[1] = 0x00;
for (j=0;j<packet_number;j++)
{
temp = j * FTS_PACKET_LENGTH;
packet_buf[2] = (FTS_BYTE)(temp>>8);
packet_buf[3] = (FTS_BYTE)temp;
lenght = FTS_PACKET_LENGTH;
packet_buf[4] = (FTS_BYTE)(lenght>>8);
packet_buf[5] = (FTS_BYTE)lenght;
for (i=0;i<FTS_PACKET_LENGTH;i++)
{
packet_buf[6+i] = pbt_buf[j*FTS_PACKET_LENGTH + i];
bt_ecc ^= packet_buf[6+i];
}
byte_write(&packet_buf[0],FTS_PACKET_LENGTH + 6);
delay_qt_ms(FTS_PACKET_LENGTH/6 + 1);
if ((j * FTS_PACKET_LENGTH % 1024) == 0)
{
//printk("[TSP] upgrade the 0x%x th byte.\n", ((unsigned int)j) * FTS_PACKET_LENGTH);
}
}
if ((dw_lenth) % FTS_PACKET_LENGTH > 0)
{
temp = packet_number * FTS_PACKET_LENGTH;
packet_buf[2] = (FTS_BYTE)(temp>>8);
packet_buf[3] = (FTS_BYTE)temp;
temp = (dw_lenth) % FTS_PACKET_LENGTH;
packet_buf[4] = (FTS_BYTE)(temp>>8);
packet_buf[5] = (FTS_BYTE)temp;
for (i=0;i<temp;i++)
{
packet_buf[6+i] = pbt_buf[ packet_number*FTS_PACKET_LENGTH + i];
bt_ecc ^= packet_buf[6+i];
}
byte_write(&packet_buf[0],temp+6);
delay_qt_ms(20);
}
//send the last six byte
for (i = 0; i<6; i++)
{
temp = 0x6ffa + i;
packet_buf[2] = (FTS_BYTE)(temp>>8);
packet_buf[3] = (FTS_BYTE)temp;
temp =1;
packet_buf[4] = (FTS_BYTE)(temp>>8);
packet_buf[5] = (FTS_BYTE)temp;
packet_buf[6] = pbt_buf[ dw_lenth + i];
bt_ecc ^= packet_buf[6];
byte_write(&packet_buf[0],7);
delay_qt_ms(20);
}
/*********Step 6: read out checksum***********************/
/*send the opration head*/
cmd_write(0xcc,0x00,0x00,0x00,1);
byte_read(reg_val,1);
//printk("[TSP] Step 6: ecc read 0x%x, new firmware 0x%x. \n", reg_val[0], bt_ecc);
if(reg_val[0] != bt_ecc)
{
return ERR_ECC;
}
/*********Step 7: reset the new FW***********************/
cmd_write(0x07,0x00,0x00,0x00,1);
return ERR_OK;
}
int fts_ctpm_fw_upgrade_with_i_file(void)
{
//printk("Step 7\n");
FTS_BYTE* pbt_buf = FTS_NULL;
int i_ret;
//=========FW upgrade========================*/
pbt_buf = CTPM_FW;
/*call the upgrade function*/
i_ret = fts_ctpm_fw_upgrade(pbt_buf,sizeof(CTPM_FW));
if (i_ret != 0)
{
//error handling ...
//TBD
}
return i_ret;
}
unsigned char fts_ctpm_get_upg_ver(void)
{
//printk("Step 8\n");
unsigned int ui_sz;
ui_sz = sizeof(CTPM_FW);
if (ui_sz > 2)
{
return CTPM_FW[ui_sz - 2];
}
else
{
//TBD, error handling?
return 0xff; //default value
}
}
#endif
/***********************************************************************************************
Name :
Input :
Output :
function :
***********************************************************************************************/
static void ft5x06_ts_release(void)
{
//printk("Step 9\n");
struct ft5x06_ts_data *data = i2c_get_clientdata(this_client);
#ifdef CONFIG_FT5X06_MULTITOUCH
input_report_abs(data->input_dev, ABS_MT_TOUCH_MAJOR, 0);
#else
input_report_abs(data->input_dev, ABS_PRESSURE, 0);
input_report_key(data->input_dev, BTN_TOUCH, 0);
#endif
input_sync(data->input_dev);
}
static int ft5x06_read_data(void)
{
//printk("Step 10\n");
struct ft5x06_ts_data *data = i2c_get_clientdata(this_client);
struct ts_event *event = &data->event;
// u8 buf[14] = {0};
u8 buf[32] = {0};
int ret = -1;
printk("===========ft5x0x start read data============\n");
#ifdef CONFIG_FT5X06_MULTITOUCH
// ret = ft5x06_i2c_rxdata(buf, 13);
ret = ft5x06_i2c_rxdata(buf, 31);
#else
ret = ft5x06_i2c_rxdata(buf, 7);
#endif
if (ret < 0) {
printk("%s read_data i2c_rxdata failed: %d\n", __func__, ret);
return ret;
}
memset(event, 0, sizeof(struct ts_event));
// event->touch_point = buf[2] & 0x03;// 0000 0011
event->touch_point = buf[2] & 0x07;// 000 0111
if (event->touch_point == 0) {
ft5x06_ts_release();
return 1;
}
#ifdef CONFIG_FT5X06_MULTITOUCH
switch (event->touch_point) {
case 5:
event->x5 = (s16)(buf[0x1b] & 0x0F)<<8 | (s16)buf[0x1c];
event->y5 = (s16)(buf[0x1d] & 0x0F)<<8 | (s16)buf[0x1e];
case 4:
event->x4 = (s16)(buf[0x15] & 0x0F)<<8 | (s16)buf[0x16];
event->y4 = (s16)(buf[0x17] & 0x0F)<<8 | (s16)buf[0x18];
case 3:
event->x3 = (s16)(buf[0x0f] & 0x0F)<<8 | (s16)buf[0x10];
event->y3 = (s16)(buf[0x11] & 0x0F)<<8 | (s16)buf[0x12];
case 2:
event->x2 = (s16)(buf[9] & 0x0F)<<8 | (s16)buf[10];
event->y2 = (s16)(buf[11] & 0x0F)<<8 | (s16)buf[12];
case 1:
event->x1 = (s16)(buf[3] & 0x0F)<<8 | (s16)buf[4];
event->y1 = (s16)(buf[5] & 0x0F)<<8 | (s16)buf[6];
break;
default:
return -1;
}
#else
if (event->touch_point == 1) {
event->x1 = (s16)(buf[3] & 0x0F)<<8 | (s16)buf[4];
event->y1 = (s16)(buf[5] & 0x0F)<<8 | (s16)buf[6];
}
#endif
event->pressure = 200;
dev_dbg(&this_client->dev, "%s: 1:%d %d 2:%d %d \n", __func__,
event->x1, event->y1, event->x2, event->y2);
////printk("%d (%d, %d), (%d, %d)\n", event->touch_point, event->x1, event->y1, event->x2, event->y2);
printk("===========ft5x0x read datav over!!============\n");
return 0;
}
/***********************************************************************************************
Name :
Input :
Output :
function :
***********************************************************************************************/
static void ft5x06_report_value(void)
{
struct ft5x06_ts_data *data = i2c_get_clientdata(this_client);
struct ts_event *event = &data->event;
u8 uVersion;
// printk("==ft5x06_report_value =\n");
#ifdef CONFIG_FT5X06_MULTITOUCH
switch(event->touch_point) {
case 5:
input_report_abs(data->input_dev, ABS_MT_TOUCH_MAJOR, event->pressure);
input_report_abs(data->input_dev, ABS_MT_POSITION_X, event->x5);
input_report_abs(data->input_dev, ABS_MT_POSITION_Y, event->y5);
//input_report_abs(data->input_dev, ABS_MT_WIDTH_MAJOR, 1);
input_mt_sync(data->input_dev);
printk("===x5 = %d,y5 = %d ====\n",event->x5,event->y5);
case 4:
input_report_abs(data->input_dev, ABS_MT_TOUCH_MAJOR, event->pressure);
input_report_abs(data->input_dev, ABS_MT_POSITION_X, event->x4);
input_report_abs(data->input_dev, ABS_MT_POSITION_Y, event->y4);
//input_report_abs(data->input_dev, ABS_MT_WIDTH_MAJOR, 1);
input_mt_sync(data->input_dev);
printk("===x4 = %d,y4 = %d ====\n",event->x4,event->y4);
case 3:
input_report_abs(data->input_dev, ABS_MT_TOUCH_MAJOR, event->pressure);
input_report_abs(data->input_dev, ABS_MT_POSITION_X, event->x3);
input_report_abs(data->input_dev, ABS_MT_POSITION_Y, event->y3);
//input_report_abs(data->input_dev, ABS_MT_WIDTH_MAJOR, 1);
input_mt_sync(data->input_dev);
printk("===x3 = %d,y3 = %d ====\n",event->x3,event->y3);
case 2:
input_report_abs(data->input_dev, ABS_MT_TOUCH_MAJOR, event->pressure);
input_report_abs(data->input_dev, ABS_MT_POSITION_X, event->x2);
input_report_abs(data->input_dev, ABS_MT_POSITION_Y, event->y2);
//input_report_abs(data->input_dev, ABS_MT_WIDTH_MAJOR, 1);
input_mt_sync(data->input_dev);
printk("===x2 = %d,y2 = %d ====\n",event->x2,event->y2);
case 1:
input_report_abs(data->input_dev, ABS_MT_SLOT, 0);
input_report_abs(data->input_dev, ABS_MT_TRACKING_ID, 45);
//input_report_abs(data->input_dev, ABS_MT_TOUCH_MAJOR, event->pressure);
input_report_abs(data->input_dev, ABS_MT_POSITION_X, event->x1);
input_report_abs(data->input_dev, ABS_MT_POSITION_Y, event->y1);
//input_report_abs(data->input_dev, ABS_MT_WIDTH_MAJOR, 1);
//input_mt_sync(data->input_dev);
input_report_abs(data->input_dev, ABS_MT_TRACKING_ID, -1);
input_sync(data->input_dev);
//input_syn_report(data->input_dev);
printk("===x1 = %d,y1 = %d ====\n",event->x1,event->y1);
default:
printk("==touch_point default =\n");
break;
}
#else /* CONFIG_FT5X06_MULTITOUCH*/
if (event->touch_point == 1) {
// printk("===x1 = %d,y1 = %d ====\n",event->x1,event->y1);
input_report_abs(data->input_dev, ABS_X, event->x1);
input_report_abs(data->input_dev, ABS_Y, 600-event->y1);
input_report_abs(data->input_dev, ABS_PRESSURE, event->pressure);
}
input_report_key(data->input_dev, BTN_TOUCH, 1);
#endif /* CONFIG_FT5X06_MULTITOUCH*/
input_sync(data->input_dev);
dev_dbg(&this_client->dev, "%s: 1:%d %d 2:%d %d \n", __func__,
event->x1, event->y1, event->x2, event->y2);
} /*end ft5x06_report_value*/
/***********************************************************************************************
Name :
Input :
Output :
function :
***********************************************************************************************/
static void ft5x06_ts_pen_irq_work(struct work_struct *work)
{
//printk("Step 12\n");
int ret = -1;
//printk("==work 1=\n");
ret = ft5x06_read_data();
if (ret == 0) {
ft5x06_report_value();
}
else //printk("data package read error\n");
//printk("==work 2=\n");
msleep(1);
// enable_irq(this_client->irq);
// enable_irq(this_client->irq);
}
/***********************************************************************************************
Name :
Input :
Output :
function :
*****************************************************************************************
d6db
******/
static irqreturn_t ft5x06_ts_interrupt(int irq, void *dev_id)
{
struct ft5x06_ts_data *ft5x06_ts = dev_id;
//disable_irq_nosync_lockdep
//disable_irq_lockdep
//disable_irq_nosync_lockdep(this_client->irq);
//disable_irq(ft5x06_ts->this_client->irq);
//printk("Step 13.b\n");
////printk("Disable IRQ 2\n");
//disable_irq(190);
//disable_irq_lockdep(this_client->irq);
// //printk("==int=\n");
//printk("Step 13.c\n");
if (!work_pending(&ft5x06_ts->pen_event_work)) {
//printk("Step 13.d\n");
queue_work(ft5x06_ts->ts_workqueue, &ft5x06_ts->pen_event_work);
//printk("Step 13.e\n");
}
//printk("Step 13.f\n");
return IRQ_HANDLED;
}
#ifdef CONFIG_HAS_EARLYSUSPEND
/***********************************************************************************************
Name :
Input :
Output :
function :
***********************************************************************************************/
static void ft5x06_ts_suspend(struct early_suspend *handler)
{
//printk("Step 14\n");
// struct ft5x06_ts_data *ts;
// ts = container_of(handler, struct ft5x06_ts_data, early_suspend);
//printk("==ft5x06_ts_suspend=\n");
// disable_irq(this_client->irq);
// disable_irq(this_client->irq);
// cancel_work_sync(&ts->pen_event_work);
// flush_workqueue(ts->ts_workqueue);
// ==set mode ==,
// ft5x06_set_reg(FT5X06_REG_PMODE, PMODE_HIBERNATE);
}
/***********************************************************************************************
Name :
Input :
Output :
function :
***********************************************************************************************/
static void ft5x06_ts_resume(struct early_suspend *handler)
{
//printk("Step 15\n");
//printk("==ft5x06_ts_resume=\n");
// wake the mode
// __gpio_as_output(GPIO_FT5X06_WAKE);
// __gpio_clear_pin(GPIO_FT5X06_WAKE); //set wake = 0,base on system
// msleep(100);
// __gpio_set_pin(GPIO_FT5X06_WAKE); //set wake = 1,base on system
// msleep(100);
// enable_irq(this_client->irq);
// enable_irq(this_client->irq);
}
#endif //CONFIG_HAS_EARLYSUSPEND
/***********************************************************************************************
Name :
Input :
Output :
function :
***********************************************************************************************/
static int
ft5x06_ts_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
//printk("Step 16\n");
struct ft5x06_ts_data *ft5x06_ts;
struct input_dev *input_dev;
int err = 0;
unsigned char uc_reg_value;
//printk("==ft5x06_ts_probe=\n");
RESETPIN_REQUEST;
RESETPIN_SET1;
//mdelay(1000);
gpio_set_value(GPIO_RESET,0);
// printk("GPIO1_14 is %d \n ", gpio_get_value(GPIO1_14));
mdelay(50);
gpio_set_value(GPIO_RESET,1);
mdelay(100);
// printk("GPIO1_14 is %d \n ", gpio_get_value(GPIO1_14));
if (!i2c_check_functionality(client->adapter, I2C_FUNC_I2C)) {
err = -ENODEV;
goto exit_check_functionality_failed;
}
//printk("==kzalloc=\n");
ft5x06_ts = kzalloc(sizeof(*ft5x06_ts), GFP_KERNEL);
if (!ft5x06_ts) {
err = -ENOMEM;
goto exit_alloc_data_failed;
}
this_client = client;
i2c_set_clientdata(client, ft5x06_ts);
INIT_WORK(&ft5x06_ts->pen_event_work, ft5x06_ts_pen_irq_work);
ft5x06_ts->ts_workqueue = create_singlethread_workqueue(dev_name(&client->dev));
if (!ft5x06_ts->ts_workqueue) {
err = -ESRCH;
goto exit_create_singlethread;
}
// pdata = client->dev.platform_data;
// if (pdata == NULL) {
// dev_err(&client->dev, "%s: platform data is null\n", __func__);
// goto exit_platform_data_null;
// }
// //printk("==request_irq=\n");
// err = request_irq(client->irq, ft5x06_ts_interrupt, IRQF_DISABLED, "ft5x06_ts", ft5x06_ts);
this_client->irq = gpio_to_irq(GPIO_INT);
if (this_client->irq < 0)
{
printk("Unable to get irq number for GPIO_NUM\n");
goto exit_irq_request_failed;
}
err = request_irq(this_client->irq, ft5x06_ts_interrupt, IRQF_TRIGGER_FALLING, "ft5x06_ts", ft5x06_ts);
if (err < 0) {
dev_err(&client->dev, "ft5x06_probe: request irq failed\n");
goto exit_irq_request_failed;
}
printk(">>>>>>>>>>>>>request_irq\n");
// __gpio_as_irq_fall_edge(pdata->intr); //
// disable_irq(this_client->irq);
//printk("Disable IRQ 1\n");
disable_irq(this_client->irq);
input_dev = input_allocate_device();
if (!input_dev) {
err = -ENOMEM;
dev_err(&client->dev, "failed to allocate input device\n");
goto exit_input_dev_alloc_failed;
}
// printk("==input_allocate_device=\n");
ft5x06_ts->input_dev = input_dev;
#ifdef CONFIG_FT5X06_MULTITOUCH
set_bit(ABS_MT_TOUCH_MAJOR, input_dev->absbit);
set_bit(ABS_MT_POSITION_X, input_dev->absbit);
set_bit(ABS_MT_POSITION_Y, input_dev->absbit);
set_bit(ABS_MT_WIDTH_MAJOR, input_dev->absbit);
input_set_abs_params(input_dev,
ABS_MT_POSITION_X, 0, SCREEN_MAX_X, 0, 0);
input_set_abs_params(input_dev,
ABS_MT_POSITION_Y, 0, SCREEN_MAX_Y, 0, 0);
input_set_abs_params(input_dev,
ABS_MT_TOUCH_MAJOR, 0, PRESS_MAX, 0, 0);
input_set_abs_params(input_dev,
ABS_MT_WIDTH_MAJOR, 0, 200, 0, 0);
// printk("==> ABS_MT_POSITION_X = %x\n",ABS_MT_POSITION_X);
// printk("==> ABS_MT_POSITION_Y = %x\n",ABS_MT_POSITION_Y);
// printk("==> ABS_MT_TOUCH_MAJOR = %x\n",ABS_MT_TOUCH_MAJOR);
// printk("==> ABS_MT_WIDTH_MAJOR = %x\n",ABS_MT_WIDTH_MAJOR);
#else
set_bit(ABS_X, input_dev->absbit);
set_bit(ABS_Y, input_dev->absbit);
set_bit(ABS_PRESSURE, input_dev->absbit);
set_bit(BTN_TOUCH, input_dev->keybit);
input_set_abs_params(input_dev, ABS_X, 0, SCREEN_MAX_X, 0, 0);
input_set_abs_params(input_dev, ABS_Y, 0, SCREEN_MAX_Y, 0, 0);
input_set_abs_params(input_dev,
ABS_PRESSURE, 0, PRESS_MAX, 0 , 0);
#endif
set_bit(EV_ABS, input_dev->evbit);
set_bit(EV_KEY, input_dev->evbit);
input_dev->name = FT5X0X_NAME; //dev_name(&client->dev)
err = input_register_device(input_dev);
if (err) {
dev_err(&client->dev,
"ft5x06_ts_probe: failed to register input device: %s\n",
dev_name(&client->dev));
goto exit_input_register_device_failed;
}
#ifdef CONFIG_HAS_EARLYSUSPEND
//printk("==register_early_suspend =\n");
ft5x06_ts->early_suspend.level = EARLY_SUSPEND_LEVEL_BLANK_SCREEN + 1;
ft5x06_ts->early_suspend.suspend = ft5x06_ts_suspend;
ft5x06_ts->early_suspend.resume = ft5x06_ts_resume;
register_early_suspend(&ft5x06_ts->early_suspend);
#endif
msleep(50);
//get some register information
uc_reg_value = ft5x06_read_fw_ver();
printk("[FST] Firmware version = 0x%x\n", uc_reg_value);
// fts_ctpm_fw_upgrade_with_i_file();
//wake the CTPM
// __gpio_as_output(GPIO_FT5X06_WAKE);
// __gpio_clear_pin(GPIO_FT5X06_WAKE); //set wake = 0,base on system
// msleep(100);
// __gpio_set_pin(GPIO_FT5X06_WAKE); //set wake = 1,base on system
// msleep(100);
// ft5x06_set_reg(0x88, 0x05); //5, 6,7,8
// ft5x06_set_reg(0x80, 30);
// msleep(50);
// enable_irq(this_client->irq);
enable_irq(this_client->irq);
printk("==probe over =\n");
return 0;
exit_input_register_device_failed:
input_free_device(input_dev);
exit_input_dev_alloc_failed:
// free_irq(client->irq, ft5x06_ts);
free_irq(this_client->irq, ft5x06_ts);
exit_irq_request_failed:
exit_platform_data_null:
cancel_work_sync(&ft5x06_ts->pen_event_work);
destroy_workqueue(ft5x06_ts->ts_workqueue);
exit_create_singlethread:
//printk("==singlethread error =\n");
i2c_set_clientdata(client, NULL);
kfree(ft5x06_ts);
exit_alloc_data_failed:
exit_check_functionality_failed:
return err;
}
/***********************************************************************************************
Name :
Input :
Output :
function :
***********************************************************************************************/
static int __devexit ft5x06_ts_remove(struct i2c_client *client)
{
//printk("Step 17\n");
//printk("==ft5x06_ts_remove=\n");
struct ft5x06_ts_data *ft5x06_ts = i2c_get_clientdata(client);
unregister_early_suspend(&ft5x06_ts->early_suspend);
// free_irq(client->irq, ft5x06_ts);
free_irq(this_client->irq, ft5x06_ts);
gpio_free(GPIO_RESET);
input_unregister_device(ft5x06_ts->input_dev);
kfree(ft5x06_ts);
cancel_work_sync(&ft5x06_ts->pen_event_work);
destroy_workqueue(ft5x06_ts->ts_workqueue);
i2c_set_clientdata(client, NULL);
return 0;
}
static const struct i2c_device_id ft5x06_ts_id[] = {
{ FT5X0X_NAME, 0 },{ }
};
MODULE_DEVICE_TABLE(i2c, ft5x06_ts_id);
static struct i2c_driver ft5x06_ts_driver = {
.probe = ft5x06_ts_probe,
.remove = __devexit_p(ft5x06_ts_remove),
.id_table = ft5x06_ts_id,
.driver = {
.name = FT5X0X_NAME,
.owner = THIS_MODULE,
},
};
/***********************************************************************************************
Name :
Input :
Output :
function :
***********************************************************************************************/
static int __init ft5x06_ts_init(void)
{
//printk("Step 18\n");
int ret;
printk("==ft5x06_ts_init==\n");
ret = i2c_add_driver(&ft5x06_ts_driver);
//printk("ret=%d\n",ret);
return ret;
// return i2c_add_driver(&ft5x06_ts_driver);
}
/***********************************************************************************************
Name :
Input :
Output :
function :
***********************************************************************************************/
static void __exit ft5x06_ts_exit(void)
{
//printk("Step 19\n");
//printk("==ft5x06_ts_exit==\n");
i2c_del_driver(&ft5x06_ts_driver);
}
module_init(ft5x06_ts_init);
module_exit(ft5x06_ts_exit);
MODULE_AUTHOR("<wenfs@Focaltech-systems.com>");
MODULE_DESCRIPTION("FocalTech ft5x06 TouchScreen driver");
MODULE_LICENSE("GPL");
如何移植驱动和测试网上都有例程,自行百度。

相关文章推荐
- Linux设备驱动工程师之路——触摸屏驱动s3c2410_ts.c分析
- linux触摸屏驱动开发中的s3c_ts_probe()函数的分析
- (原创)6410触摸屏驱动分析(s3c-ts.c)(Linux)(分析)
- Linux设备驱动工程师之路——触摸屏驱动s3c2410_ts.c分析
- Linux触摸屏驱动分析(6410) -- s3c-ts
- linux触摸屏驱动开发中的s3c_ts_probe()函数的分析
- 触摸屏驱动s3c2410_ts.c分析
- Linux设备驱动工程师之路——触摸屏驱动s3c2410_ts.c分析
- Linux设备驱动工程师之路——触摸屏驱动s3c2410_ts.c分析
- 6410触摸屏驱动分析(s3c-ts.c)(Linux)(分析)
- 触摸屏驱动分析之S3C2440_ts.c
- 6410触摸屏驱动分析(s3c-ts.c)(Linux)(分析)
- 触摸屏驱动分析之S3C2440_ts.c
- 触摸屏驱动分析之S3C2440_ts.c
- 6410触摸屏驱动分析(s3c-ts.c)(Linux)(分析)
- 触摸屏驱动分析之——ts_test.c
- 6410触摸屏驱动分析(s3c-ts.c)(Linux)(分析)
- 触摸屏驱动分析(s3c-ts.c)(Linux)(分析)
- input子系统整体流程全面分析(触摸屏驱动为例)
- 18.Llinux-触摸屏驱动(详解)