OpenCV学习记录之视频中的火焰检测识别
2017-04-17 15:53
1011 查看
主要完成两个视频中火焰的检测,主要结合RGB判据和HIS判据,设定合适的阈值条件,检测出火焰对应像素的区域,将原图二值化,经过中值滤波以及数学形态学的膨胀运算等图像处理,消除一些噪声及离散点,连通一些遗漏的区域。基于OpenCV的开源库,在VS2013平台上,实现了两个视频中火焰的检测。
利用OpenCV有强大的图像处理库,直接将图像分离为RGB三通道,设置条件限制,找到火焰的像素位置,将原图处理成二值图像。对于火焰检测,本文结合RGB判据和HIS判据,分割出火焰的区域。一般用于人眼观看的颜色模型是RGB模型,对于火焰而言,红色分量(R)和绿色分量(G)会很大,并且绿色分量(G)会大于蓝色分量(B)。HIS颜色模型分别用H(色度)S(饱和度)I(亮度)描述颜色特性,与人们感受颜色的方式紧密相连。考虑到单一颜色模型的判据准确性不够高,在RGB判据基础上,添加HIS约束条件。具体条件[1]为:
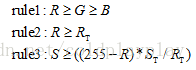
其中,Rt是红色分量阈值,St是饱和度阈值,火焰像素主要取决于红色分量(R)的色度和饱和度。若满足式(1),则判断该位置为火焰像素,显示为白色,否则显示为黑色。判据中阈值的选择对于火焰检测是至关重要的,一般靠经验设定,为了获取火焰识别最好的效果,设置两个滑动条,改变阈值Rt和St的大小,选取最合适的值。
由于(1)中只需要用到HIS中的S分量,所以不需要用到颜色模型转换函数,直接计算S分量即可。
获取二值图像后,需要对其预处理,找到遗漏的点,剔除异常的点。由于存在噪声及离散点,对图像进行平滑滤波,本文采用的是中值滤波,中值滤波是典型的非线性滤波,用像素点邻域灰度值的中值来代替该像素点的灰度值,非常利于消除一些误判断为火焰的像素点。
由于部分火焰的颜色不是介于红黄之间,无法识别,需要实现区域的连通,因此对二值图像进行数学形态学操作。形态学是一种强大的图像处理工具,它可以实现图像去噪、图像分割等功能,最基本的形态学操作有两种,分别是膨胀与腐蚀。它们可以衍生出很多强大的形态学算法,实现我们想要的功能。采用形态学处理的最基础的膨胀操作,作用于火焰的二值图像中。
编写CheckColor函数,将以上3个功能实现。
为了表示出视频中火焰的区域,在预处理过后,将火焰轮廓用矩形框标记,编写了画矩形框的函数DrawFire,其中使用了OpenCV的寻找轮廓的函数findContours,由于作业中test2的火焰位置是分散在不同地方的,所以对整张图像进行区域的划分,分别用不同矩形标记不同区域出现的火焰。
基于OpenCV的库,在VS2013上实现算法,由于视频中的火焰检测是实时动态的,下面截取几帧画面用于展示实验结果:

本文采用RGB判据和HIS判据结合的方法,按照经验法和不断地调试,选择合适的阈值,基于OpenCV在VS2013上实现算法,从test1实验结果可以看出,在背景比较单调且与火焰差别较大时,效果良好,几乎没有任何噪声对其造成干扰。从test2实验结果可以看出,当背景复杂或与火焰颜色比较相似时,会不时出现噪声和误判,需要进一步提高算法。
列出处理test2视频的具体代码:
利用OpenCV有强大的图像处理库,直接将图像分离为RGB三通道,设置条件限制,找到火焰的像素位置,将原图处理成二值图像。对于火焰检测,本文结合RGB判据和HIS判据,分割出火焰的区域。一般用于人眼观看的颜色模型是RGB模型,对于火焰而言,红色分量(R)和绿色分量(G)会很大,并且绿色分量(G)会大于蓝色分量(B)。HIS颜色模型分别用H(色度)S(饱和度)I(亮度)描述颜色特性,与人们感受颜色的方式紧密相连。考虑到单一颜色模型的判据准确性不够高,在RGB判据基础上,添加HIS约束条件。具体条件[1]为:
其中,Rt是红色分量阈值,St是饱和度阈值,火焰像素主要取决于红色分量(R)的色度和饱和度。若满足式(1),则判断该位置为火焰像素,显示为白色,否则显示为黑色。判据中阈值的选择对于火焰检测是至关重要的,一般靠经验设定,为了获取火焰识别最好的效果,设置两个滑动条,改变阈值Rt和St的大小,选取最合适的值。
由于(1)中只需要用到HIS中的S分量,所以不需要用到颜色模型转换函数,直接计算S分量即可。
获取二值图像后,需要对其预处理,找到遗漏的点,剔除异常的点。由于存在噪声及离散点,对图像进行平滑滤波,本文采用的是中值滤波,中值滤波是典型的非线性滤波,用像素点邻域灰度值的中值来代替该像素点的灰度值,非常利于消除一些误判断为火焰的像素点。
由于部分火焰的颜色不是介于红黄之间,无法识别,需要实现区域的连通,因此对二值图像进行数学形态学操作。形态学是一种强大的图像处理工具,它可以实现图像去噪、图像分割等功能,最基本的形态学操作有两种,分别是膨胀与腐蚀。它们可以衍生出很多强大的形态学算法,实现我们想要的功能。采用形态学处理的最基础的膨胀操作,作用于火焰的二值图像中。
编写CheckColor函数,将以上3个功能实现。
为了表示出视频中火焰的区域,在预处理过后,将火焰轮廓用矩形框标记,编写了画矩形框的函数DrawFire,其中使用了OpenCV的寻找轮廓的函数findContours,由于作业中test2的火焰位置是分散在不同地方的,所以对整张图像进行区域的划分,分别用不同矩形标记不同区域出现的火焰。
基于OpenCV的库,在VS2013上实现算法,由于视频中的火焰检测是实时动态的,下面截取几帧画面用于展示实验结果:
本文采用RGB判据和HIS判据结合的方法,按照经验法和不断地调试,选择合适的阈值,基于OpenCV在VS2013上实现算法,从test1实验结果可以看出,在背景比较单调且与火焰差别较大时,效果良好,几乎没有任何噪声对其造成干扰。从test2实验结果可以看出,当背景复杂或与火焰颜色比较相似时,会不时出现噪声和误判,需要进一步提高算法。
列出处理test2视频的具体代码:
#include<opencv2/opencv.hpp>
#include<cv.h>
using namespace cv;
int redThre =49; // 115~135
int saturationTh = 7; //55~65
Mat CheckColor(Mat &inImg);
void DrawFire(Mat &inputImg, Mat foreImg);
int main()
{
VideoCapture capture("test2.avi");
while (1)
{
Mat frame;
capture >> frame;
if (frame.empty())
break;
namedWindow("Control", CV_WINDOW_AUTOSIZE);
cvCreateTrackbar("redThre", "Control", &redThre, 255);
cvCreateTrackbar("saturationTh", "Control", &saturationTh, 255);
CheckColor(frame);
waitKey(1);
}
return 0;
}
//The Color Check is According to "An Early Fire-Detection Method Based on Image Processing"
//The Author is:Thou-Ho (Chao-Ho) Chen, Ping-Hsueh Wu, and Yung-Chuen Chiou
Mat CheckColor(Mat &inImg)
{
Mat fireImg;
fireImg.create(inImg.size(), CV_8UC1);
Mat multiRGB[3];
int a = inImg.channels();
split(inImg, multiRGB); //将图片拆分成R,G,B,三通道的颜色
for (int i = 0; i < inImg.rows; i++)
{
for (int j = 0; j < inImg.cols; j++)
{
float B, G, R;
B = multiRGB[0].at<uchar>(i, j); //每个像素的R,G,B值,动态地址计算法
G = multiRGB[1].at<uchar>(i, j);
R = multiRGB[2].at<uchar>(i, j);
float maxValue = max(max(B, G), R);
float minValue = min(min(B, G), R);
//与HSI中S分量的计算公式
double S = (1 - 3.0*minValue / (R + G + B));//
//R > RT R>=G>=B S>=((255-R)*ST/RT)
if (R > redThre &&R >= G && G>= B && S >((255 - R) * saturationTh / redThre))
{
fireImg.at<uchar>(i, j) = 255;
}
else
{
fireImg.at<uchar>(i, j) = 0;
}
}
}
//erode(fireImg, fireImg, Mat(3, 3, CV_8UC1));
//GaussianBlur(fireImg, fireImg, Size(5, 5), 0, 0);
medianBlur(fireImg, fireImg, 5);
dilate(fireImg, fireImg, Mat(5, 5, CV_8UC1));
imshow("Binary", fireImg);
DrawFire(inImg, fireImg);
return fireImg;
}
void DrawFire(Mat &inputImg, Mat foreImg)
{
vector<vector<Point>> contours_set;//保存轮廓提取后的点集及拓扑关系
findContours(foreImg, contours_set, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_NONE);
Point point1;
Point point2;
float a = 0.4, b = 0.75;
float xmin1 = a*inputImg.cols, ymin1 = inputImg.rows, xmax1 = 0, ymax1 = 0;
float xmin2 = b*inputImg.cols, ymin2 = inputImg.rows, xmax2 = a*inputImg.cols, ymax2 = 0;
float xmin3 = inputImg.cols, ymin3 = inputImg.rows, xmax3 = b*inputImg.cols, ymax3 = 0;
Rect finalRect1;
Rect finalRect2;
Rect finalRect3;
vector<vector<Point> >::iterator iter = contours_set.begin();
for (; iter != contours_set.end();)
{
Rect rect = boundingRect(*iter);
float radius;
Point2f center;
minEnclosingCircle(*iter, center, radius);
if (rect.area()> 0)
{
point1.x = rect.x;
point1.y = rect.y;
point2.x = point1.x + rect.width;
point2.y = point1.y + rect.height;
if (point2.x< a*inputImg.cols)
{
if (point1.x < xmin1)
xmin1 = point1.x;
if (point1.y < ymin1)
ymin1 = point1.y;
if (point2.x > xmax1 && point2.x < x
ab9d
max2)
xmax1 = point2.x;
if (point2.y > ymax1)
ymax1 = point2.y;
}
if (point2.x < b*inputImg.cols&&point2.x > a*inputImg.cols)
{
if (point1.x < xmin2 && point1.x>xmin1)
xmin2 = point1.x;
if (point1.y < ymin2)
ymin2 = point1.y;
if (point2.x > xmax2 && point2.x < xmax3)
xmax2 = point2.x;
if (point2.y > ymax2)
ymax2 = point2.y;
}
if (point2.x < inputImg.cols&&point2.x > b*inputImg.cols)
{
if (point1.x < xmin3 && point1.x>xmin2)
xmin3 = point1.x;
if (point1.y < ymin3)
ymin3 = point1.y;
if (point2.x > xmax3)
xmax3 = point2.x;
if (point2.y > ymax3)
ymax3 = point2.y;
}
++iter;
}
else
{
iter = contours_set.erase(iter);
}
}
if (xmin1 == a*inputImg.cols&& ymin1 == inputImg.rows&&xmax1 == 0 && ymax1== 0)
{
xmin1 = ymin1 = xmax1 = ymax1 = 0;
}
if (xmin2 == b*inputImg.cols&& ymin2 == inputImg.rows&& xmax2 == a*inputImg.cols&& ymax2 == 0)
{
xmin2 = ymin2 = xmax2 = ymax2 = 0;
}
if (xmin3 == inputImg.cols&&ymin3 == inputImg.rows&& xmax3 == b*inputImg.cols&& ymax3 == 0)
{
xmin3 = ymin3 = xmax3 = ymax3 = 0;
}
finalRect1= Rect(xmin1, ymin1, xmax1 - xmin1, ymax1 - ymin1);
finalRect2 = Rect(xmin2, ymin2, xmax2 - xmin2, ymax2 - ymin2);
finalRect3 = Rect(xmin3, ymin3, xmax3 - xmin3, ymax3 - ymin3);
rectangle(inputImg, finalRect1, Scalar(0, 255, 0));
rectangle(inputImg, finalRect2, Scalar(0, 255, 0));
rectangle(inputImg, finalRect3, Scalar(0, 255, 0));
imshow("Fire_Detection", inputImg);
}

相关文章推荐
- 基于OpenCv的人脸检测、识别系统学习制作笔记之三
- OpenCV学习记录(一):使用haar分类器进行人脸识别
- 新手学习opencv--基于Hog的视频行人检测
- 学习opencv——读取视频并进行canny检测
- OpenCV学习 4:摄像头视频读写与边缘检测
- 人脸检测和识别 源代码 下载-opencv3+python3.6完整实战项目源代码 识别视频《欢乐颂》中人物
- OpenCV学习 物体检测 人脸识别 填充颜色
- OpenCV 学习记录6 视频读取人像并对脸部调色
- 学习opencv——从摄像机读取视频流并进行边缘检测
- OpenCV学习——Laplace变换(视频边界检测)
- 基于深度学习框架的火灾识别报警平台搭建----OpenCV3.1.0读取dav视频数据出错
- OpenCV学习之寻找轮廓实现视频流的运动目标检测
- OpenCV学习笔记——视频的边缘检测
- 1.0.x-学习Opencv与MFC混合编程之---视频运动检测
- OpenCV关于视频处理的学习(VideoCapture类)-在检测中一些必要的图像操作
- 1.0.x-学习Opencv与MFC混合编程之---视频运动检测
- 1.0.x-学习Opencv与MFC混合编程之---视频运动检测
- 人脸检测识别深度学习记录
- 代码C++, opencv实现人脸识别,人脸检测,人脸匹配,视频中的人脸检测,摄像头下的人脸检测等
- OpenCV学习记录(二):自己训练haar特征的adaboost分类器进行人脸识别 标签: 脸部识别opencv 2017-07-03 21:38 26人阅读