基EmguCv/OpenCv的零件的缺陷检测
2017-02-17 10:48
399 查看
基EmguCv/OpenCv的零件的缺陷检测
思路:
对图像去噪和二值化处理;
提取外部轮廓,并填充;
提取内部轮廓并以另一种颜色填充;
外轮廓和内轮廓叠加,得到缺陷区域;
对缺陷区域做二值化处理,并提取轮廓计算缺陷面积;
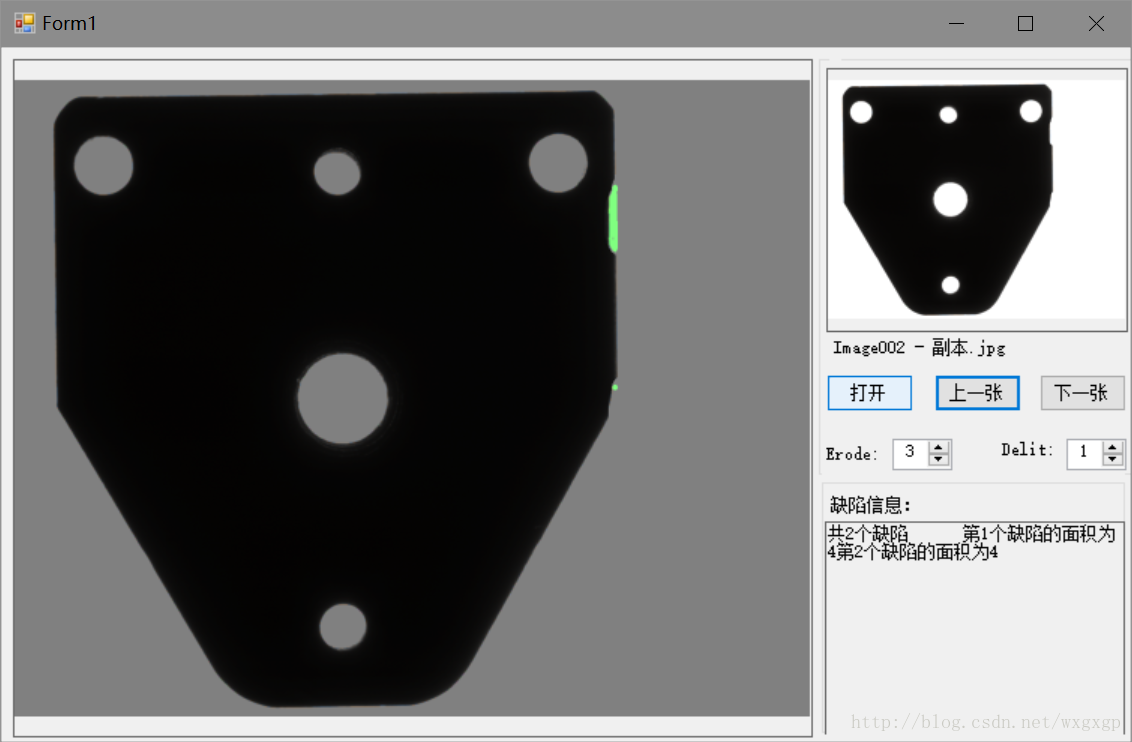
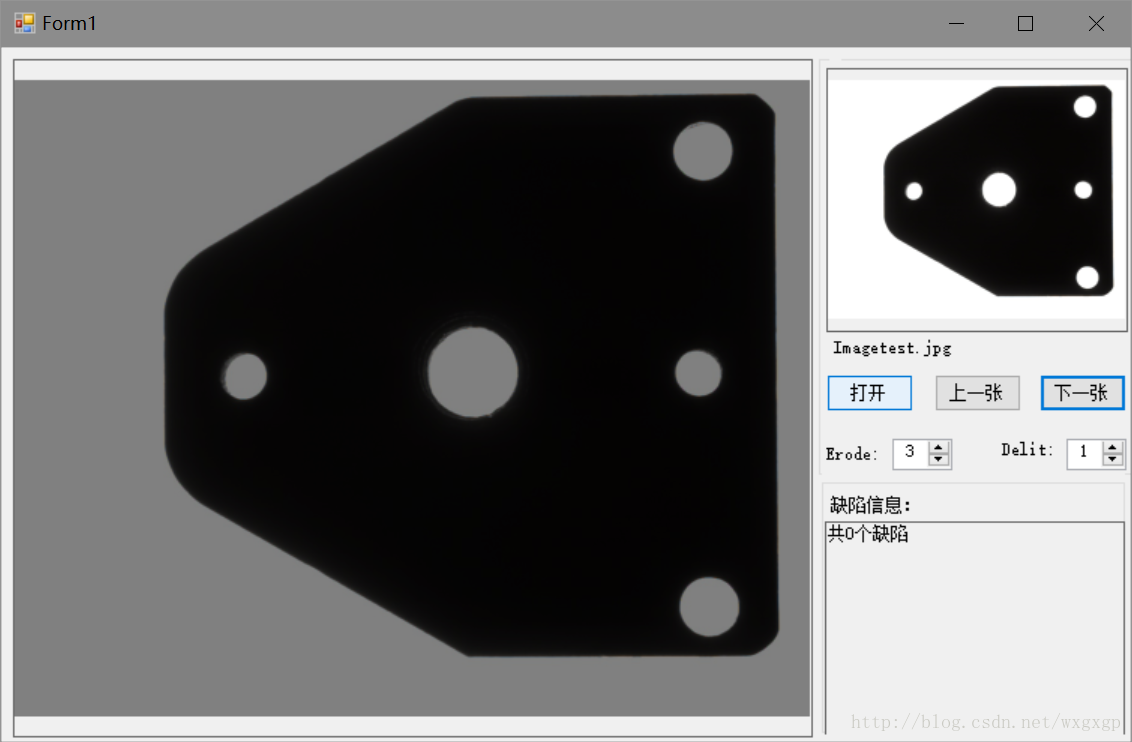
标记处缺陷位置。
存在的缺陷:只能检测外测缺陷,无法检测内部缺陷。
效果图

源代码(c#)
思路:
对图像去噪和二值化处理;
提取外部轮廓,并填充;
提取内部轮廓并以另一种颜色填充;
外轮廓和内轮廓叠加,得到缺陷区域;
对缺陷区域做二值化处理,并提取轮廓计算缺陷面积;
标记处缺陷位置。
存在的缺陷:只能检测外测缺陷,无法检测内部缺陷。
效果图
源代码(c#)
using Emgu.CV;
using Emgu.CV.CvEnum;
using Emgu.CV.Structure;
using Emgu.CV.Util;
using System;
using System.Drawing;
using System.IO;
using System.Windows.Forms;
namespace DefectDetection2
{
public partial class Form1 : Form
{
public Form1()
{
InitializeComponent();
}
private string[] FileNmae = null;//读取文件夹下的文件
private int times = 0;//上一张/下一张按钮点击次数(对应图片数组的索引)
private int ErodeVaule = 1, DelitVaule = 1;//膨胀/腐蚀运算
private Image<Bgr, byte> picture = null;//原始图片
private int BinVaule = 0;//二值化阈值
private int y = 0, cr_min = 0, cb_min = 0, cr_max = 0,cb_max=0;//YCC颜色阈值
private double area1 = 0, area2 = 0;//缺陷面积
/// <summary>
/// Erode值
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void domainUpDown1_SelectedItemChanged(object sender, EventArgs e)
{
ErodeVaule = Convert.ToInt16(domainUpDown1.Text);
}
/// <summary>
/// Delite值
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void domainUpDown2_SelectedItemChanged(object sender, EventArgs e)
{
DelitVaule = Convert.ToInt16(domainUpDown2.Text);
}
/// <summary>
/// 选择图片
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void button1_Click(object sender, EventArgs e)
{
OpenFileDialog ofd = new OpenFileDialog();
if (ofd.ShowDialog() == DialogResult.OK)
{
pictureBox2.Image = Image.FromFile(ofd.FileName);
picture = new Image<Bgr, byte>(ofd.FileName);
Image <Bgr ,byte >pic= new Image<Bgr, byte>(PicSubtraction(ContourFilling(ToBin(picture)), ContourFilling2(ToBin(picture))).Bitmap);
pictureBox1.Image = ContourFilling3(pic).Bitmap;
label4.Text = Path.GetFileName(ofd.FileName);
}
}
/// <summary>
/// 上一张
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void button2_Click(object sender, EventArgs e)
{
FileNmae = Directory.GetFiles(@"D:\work\HCI\工件样品");
times--;
if (times < 0)
times = FileNmae.Length - 1;
picture = new Image<Bgr, byte>(FileNmae[times]);
pictureBox2.Image = Image.FromFile(FileNmae[times]);
label4.Text = Path.GetFileName(FileNmae[times]);
Image<Bgr, byte> pic = new Image<Bgr, byte>(PicSubtraction(ContourFilling(ToBin(picture)), ContourFilling2(ToBin(picture))).Bitmap);
pictureBox1.Image = ContourFilling3(pic).Bitmap;
}
/// <summary>
/// 下一张
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void button3_Click(object sender, EventArgs e)
{
FileNmae = Directory.GetFiles(@"D:\work\HCI\工件样品");
times++;
if (times > FileNmae.Length - 1)
times = 0;
picture = new Image<Bgr, byte>(FileNmae[times]);
pictureBox2.Image = Image.FromFile(FileNmae[times]);
label4.Text = Path.GetFileName(FileNmae[times]);
Image<Bgr, byte> pic = new Image<Bgr, byte>(PicSubtraction(ContourFilling(ToBin(picture)), ContourFilling2(ToBin(picture))).Bitmap);
pictureBox1.Image = ContourFilling3(pic).Bitmap;
}
/// <summary>
/// 二值化
/// </summary>
/// <param name="pic">输入Bgr图片</param>
/// <returns></returns>
private Image<Gray, byte> ToBin(Image<Bgr, byte> pic)
{
Image<Gray, byte> outpic = pic.Convert<Gray, byte>();
outpic = outpic.ThresholdBinary(new Gray(100), new Gray(255));
outpic = outpic.Erode(ErodeVaule);
outpic = outpic.Dilate(DelitVaule);
return outpic;
}
/// <summary>
/// 补全轮廓并填充
/// </summary>
/// <param name="pic">输入灰度图</param>
/// <returns></returns>
private Image<Bgr, byte> ContourFilling(Image<Gray, byte> pic)
{
Image<Bgr, byte> outpic = new Image<Bgr, byte>(pic.Size);
pic = pic.Canny(100, 255);
Image<Gray, byte> outcon = new Image<Gray, byte>(pic.Size);
VectorOfVectorOfPoint con = new VectorOfVectorOfPoint();
CvInvoke.FindContours(pic, con, outcon, RetrType.External, ChainApproxMethod.ChainApproxNone);
Point[][] con1 = con.ToArrayOfArray();
PointF[][] con2 = Array.ConvertAll(con1, new Converter<Point[], PointF[]>(PointToPointF));
PointF[] hull = new PointF[con[0].Size];
for (int i = 0; i < con.Size; i++)
{
hull = CvInvoke.ConvexHull(con2[i], true);
for (int j = 0; j < hull.Length; j++)
{
Point p1 = new Point((int)(hull[j].X + 0.5), (int)(hull[j].Y + 0.5));
Point p2;
if (j == hull.Length - 1)
{
p2 = new Point((int)(hull[0].X + 0.5), (int)(hull[0].Y + 0.5));
}
else
p2 = new Point((int)(hull[j + 1].X + 0.5), (int)(hull[j + 1].Y + 0.5));
CvInvoke.Line(outpic, p1, p2, new MCvScalar(255, 0, 255, 255), 2, 0, 0);
}
}
Image<Gray, byte> gray = new Image<Gray, byte>(pic.Size);
gray = outpic.Convert<Gray, byte>();
gray = gray.ThresholdBinary(new Gray(100), new Gray(255));
gray = gray.Canny(100, 255);
VectorOfVectorOfPoint con3 = new VectorOfVectorOfPoint();
CvInvoke.FindContours(gray, con3, outcon, RetrType.External, ChainApproxMethod.ChainApproxNone);
for (int i = 0; i < con3.Size; i++)
{
CvInvoke.DrawContours(outpic, con3, i, new MCvScalar(255, 0, 0), -1);
}
return outpic;
}
/// <summary>
/// 填充缺陷轮廓
/// </summary>
/// <param name="pic"></param>
/// <returns></returns>
private Image<Bgr, byte> ContourFilling2(Image<Gray, byte> pic)
{
Image<Bgr, byte> outpic = new Image<Bgr, byte>(pic.Size);
pic = pic.Canny(100, 255);
Image<Gray, byte> outcon = new Image<Gray, byte>(pic.Size);
VectorOfVectorOfPoint con = new VectorOfVectorOfPoint();
CvInvoke.FindContours(pic, con, outcon, RetrType.External, ChainApproxMethod.ChainApproxNone);
for (int i = 0; i < con.Size; i++)
{
CvInvoke.DrawContours(outpic, con, i, new MCvScalar(0, 255, 255, 0), -1);
}
for (int i = 0; i < con.Size; i++)
{
CvInvoke.DrawContours(outpic, con, i, new MCvScalar(0, 255, 255, 0),10);
}
return outpic;
}
/// <summary>
/// 叠加图像
/// </summary>
/// <param name="pic1">输入Bgr图像1</param>
/// <param name="pic2">输入Bgr图像2</param>
/// <returns></returns>
private Image<Bgr, byte> PicSubtraction(Image<Bgr, byte> pic1, Image<Bgr, byte> pic2)
{
Image<Bgr, byte> outpic = new Image<Bgr, byte>(pic1.Size);
pic1 = ContourFilling(ToBin(picture));
pic2 = ContourFilling2(ToBin(picture));
CvInvoke.AddWeighted(pic1, 0.5, pic2, 0.5, 1, outpic);
return outpic;
}
/// <summary>
/// Point转换为PointF
/// </summary>
/// <param name="pt">输入Point</param>
/// <returns></returns>
private PointF[] PointToPointF(Point[] pt)
{
PointF[] aaa = new PointF[pt.Length];
int num = 0;
foreach (var point in pt)
{
aaa[num].X = point.X;
aaa[num++].Y = (int)point.Y;
}
return aaa;
}
/// <summary>
/// 填充缺陷轮廓
/// </summary>
/// <param name="pic">输入Bgr图像</param>
/// <returns></returns>
private Image<Bgr, byte> ContourFilling3(Image<Bgr, byte> pic)
{
Image<Bgr, byte> outpic = new Image<Bgr, byte>(pic.Size);
Image<Ycc, byte> ycc = pic.Convert<Ycc, byte>();
for(int i=0;i<ycc.Height;i++)
for(int j=0;j<ycc.Width;j++)
{
if (ycc[i, j].Cr > 35 && ycc[i, j].Cr < 148 &&
ycc[i, j].Cb > 48 && ycc[i, j].Cb < 141)
{
ycc[i, j] = new Ycc(0, 0, 0);
}
else ycc[i, j] = new Ycc(255, 255, 255);
}
Image<Gray, byte> gray = ycc.Convert<Gray, byte>();
gray = gray.ThresholdBinary(new Gray(100 ), new Gray(255));
gray = gray.Canny(100, 60);
Image<Gray, byte> outcon = new Image<Gray, byte>(pic.Size);
VectorOfVectorOfPoint con = new VectorOfVectorOfPoint();
CvInvoke.FindContours(gray, con, outcon, RetrType.External, ChainApproxMethod.ChainApproxNone);
int n=0;
for (int i = 0; i < con.Size; i++)
{
if (CvInvoke.ContourArea(con[i]) >0)
{
n++;
}
}
textBox1.Text = "共" + n.ToString() + "个缺陷"+" ";
n = 0;
for (int i = 0; i <con .Size ; i++)
{
if (CvInvoke.ContourArea(con[i]) >0)
{
CvInvoke.DrawContours(outpic, con, i, new MCvScalar(0, 255, 0), 5);
textBox1.Text = textBox1.Text + "第" + (++n).ToString() + "个缺陷的面积为" + CvInvoke.ContourArea(con[i]);
}
}
CvInvoke.AddWeighted(outpic , 0.5,picture , 0.5, 0, outpic);
return outpic;
}
}
}

相关文章推荐
- 机器视觉缺陷检测-边学边做-OpenCV + Visiual Studio 2017 C++环境搭建
- OpenCV项目实战机器视觉之零件缺陷检测(1)
- 利用OpenCV的convexHull和convexityDefects做凸包(凸壳)检测及凸包(凸壳)的缺陷检测
- OpenCV凸包凸缺陷检测
- [置顶] opencv 玻璃镜面缺陷检测,缺陷信息标记及提取
- OpenCV-Python—图像梯度和Canny边缘检测
- 【OpenCV】角点检测:Harris角点及Shi-Tomasi角点检测
- OpenCV自学笔记14:Harris角点检测实例
- opencv 霍夫变换检测直线
- 学习OpenCV——肤色检测
- opencv三帧差分法运动检测
- opencv+Recorder︱OpenCV 中使用 Haar 分类器进行面部检测
- OpenCV 边缘检测:Canny算子,Sobel算子,Laplace算子,Scharr滤波器合辑
- opencv学习笔记(六)二值化以及边缘检测
- OpenCV笔记12:霍夫变换检测圆
- OpenCV【5】---通过反投影直方图以检测特定的图像内容
- OpenCV编程->HOG检测(2)
- OpenCV 摄像头Canny边缘检测 (python)
- 图像腐蚀,模糊,canny边缘检测,opencv中摄像头捕捉的图像
- 人脸识别系统开发(8) -- OpenCV人脸检测