Edge detection using LoG
intensity梯度值分布跟图片的大小有关, 比如将一张小图片放大后会变得很模糊, 原先清晰的edge, 即大的梯度值变得模糊. 但是原有的边缘通常还是肉眼可分辨的. 但用Sobel 算子可能就检测不出来的. 为了应付不同scale与blur程度图片的边缘检测, 检测算子需要能大能小, 大的用于检测大而blur的图片上的边缘, 小的用于检测精细的边缘. Sobel算子无法满足这个要求.
其实到现在已经可以看出对边缘检测算子的两个要求:
- 可以计算一阶或二阶导数
- 可大可小
Laplacian of Gaussian(LoG)就满足这样的要求.
LoG的定义
LoG里的Gaussian是期望为0的二元正态分布:
\[
G(x, y) = e^{- \frac {x^2 + y^2}{2\sigma^2}}
\]
它的Laplacian算子为:
\[
\triangledown^2 G = \frac {\partial^2 G}{\partial x^2} + \frac {\partial^2 G}{\partial y^2} = \left[ \frac {x^2 + y^2 - \sigma ^ 4}{\sigma ^ 2}\right] e ^{-\frac{x^2 + y^2}{2\sigma^2}}
\]
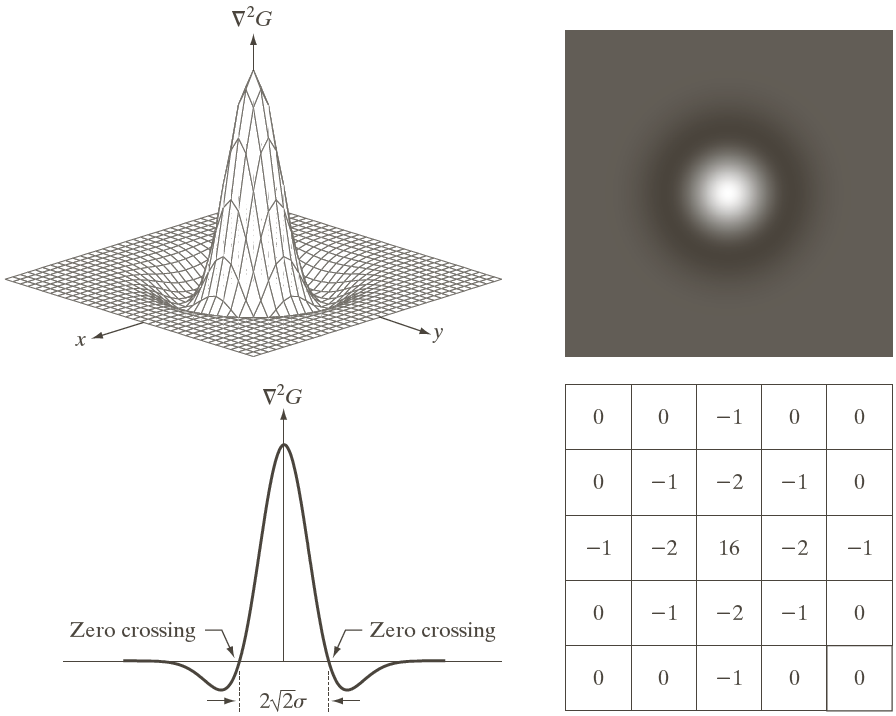
指定mask大小以后, 通过采样可以得到近似的mask. 采样的方法不是唯一的, 唯一的要求是保留\(\triangledown^2 G\)的函数形态.
得到mask之后进行conv操作.
整个变换可以表示为:
\[
T(x, y) = \triangledown^2 G(x, y) \odot I(x, y) = \triangledown^2 [G(x, y) \odot I(x, y))]
\]
其中, $ \odot\(代表conv操作. 可以交换计算顺序的原因是\)Laplacian$也是一个线性操作(通过mask实现), conv操作也是.
Marr-Hildreth edge detection算法
算法步骤:
- 高斯平滑
- 计算Laplacian
- 寻找zero-crossing点(相反方向的两个相邻点的符号相反的点, 原理见前文的第二张图), 作为edge上的点

- 论文阅读《Edge Detection Using Convolutional Neural Network》
- Edge Detection and Image SegmentatiON (EDISON) System
- 深度学习研究理解:OverFeat:Integrated Recognition, Localization and Detection using Convolutional Networks
- 基于轮廓线索的实时人体检测 Real-Time Human Detection Using Contour Cues
- Automatic fall detection of human in video using combination of features译文
- How to Monitor and Log Network Traffic on Linux Using vnStat
- Object Detection by Color: Using the GPU for Real-Time Video Image Processing
- 1202530 - Error: "HTTP Status 500"" when attempting to log on to Java InfoView using Active Directory(配置BOSSO出现的问题解决方案)
- 论文阅读(1)-Pedestrian Detection Using Wavelet Templates
- 【深度学习:目标检测】RCNN学习笔记(9):OverFeat:Integrated Recognition, Localization and Detection using Convolution
- idcard detection using opencv
- Detection Algorithms for Communication Systems Using Deep Learning笔记
- POJ 1009--Edge Detection解题思路
- Unsafe statement written to the binary log using statement format since BINLOG_FORMAT = STATEMENT. S
- Face detection using HTML5, javascript, webrtc, websockets, Jetty and OpenCV
- 论文提要“Scalable Object Detection using Deep Neural Networks”
- 深度学习笔记:Holistically-Nested Edge Detection
- 论文笔记 | OverFeat: Integrated Recognition, Localization and Detection using Convolutional Networks
- Your password has expired. To log in you must change it using a client that supports expired passwor
- Face Detection using Deep Learning: An Improved Faster RCNN Approach论文解读