MoveIt! PR2
2016-10-27 09:50
661 查看
http://wiki.ros.org/pr2_simulator/Tutorialshttp://wiki.ros.org/Robots/PR2/indigohttps://github.com/pr2安装pr2仿真运行命令:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net --recv-key 0xB01FA116 sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116 sudo apt-get update sudo apt-get install ros-indigo-pr2*或者
git clone https://github.com/pr2[/code] 运行:roslaunch pr2_gazebo pr2_empty_world.launchrosrun pr2_controller_manager pr2_controller_manager list停止r_arm_controller使用下面的命令:
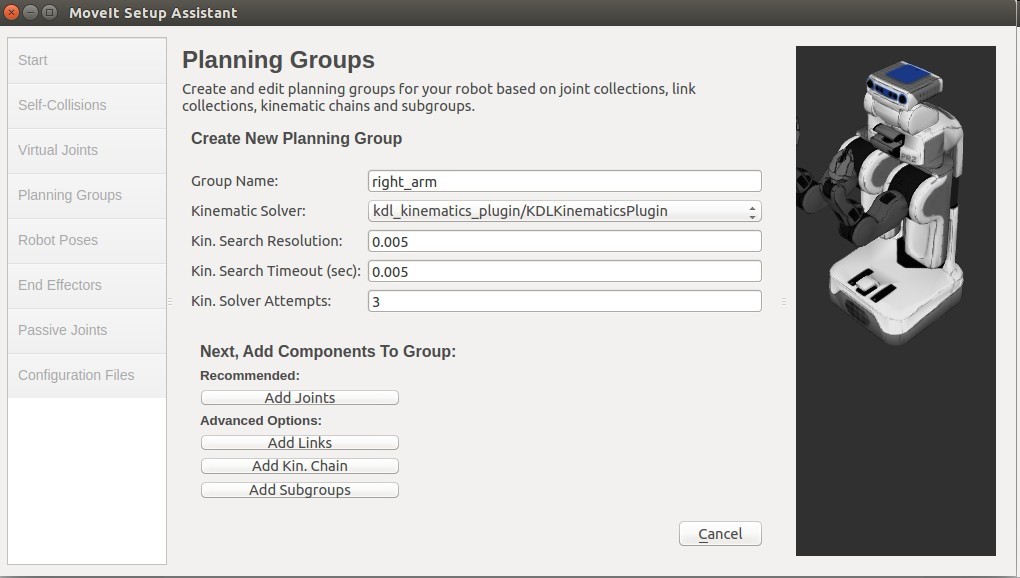
rosrun pr2_controller_manager pr2_controller_manager stop r_arm_controller编辑Gazebo控制器:略增加键盘控制:git clone https://github.com/pr2/pr2_apps.git sudo apt-get install ros-indigo-turtlebot-apps rostopic echo joint_states | less rosmake pr2_teleop roslaunch pr2_teleop teleop_pr2_keyboard.launch运行命令:sudo apt-get install ros-indigo-moveit-pr2安装PR2的MoveIt相关的包sudo apt-get install ros-indigo-moveit-full-pr2更新环境:source /opt/ros/indigo/setup.bash安装MoveItsudo apt-get install ros-indigo-moveit-fullsetup配置使用MoveIt!的第一步是要使用 Setup Assistant工具完成一些配置工作。Setup Assistant会根据用户导入的机器人的urdf模型,生成SRDF( Semantic Robot Description Format)文件,从而生成一个MoveIt!的功能包,来完成机器人的互动、可视化和仿真。首先,来运行setup assistant:roscore rosrun moveit_setup_assistant moveit_setup_assistant按教程设置:http://www.ncnynl.com/archives/201610/1030.htmlcd ~/catkin_ws/ catkin_make source devel/setup.bash roslaunch pr2_moveit_config_new demo.launch碰撞检测:
roscd pr2_moveit_config_new mkdir pr2_scenes gedit pr2_scenes/pr2_pillar.scene






相关文章推荐
- pr2_moveit包解析
- MoveIt!入门教程-笔记
- cvs update: move away ; it is in the way[解决方法]
- MoveIt!入门教程 - 创客智造
- moveit!功能包安装问题
- ros之真实驱动diy6自由度机械臂(moveit中controller源码)
- Turn off cache of Thumdbs.db to prevent the move blocking from it in automation
- 通过Moveit!创建的文件--srdf文件
- 如何利用ROS MoveIt快速搭建机器人运动规划平台?
- Gazebo与ros_control(3):Moveit输出规划轨迹到Gazebo
- MoveIt! 7自由度机械手
- 运动规划 (Motion Planning): MoveIt! 与 OMPL
- 配置MoveIT!时出现REQUIRED process [moveit_setup_assistant-2] has died!问题
- 运动规划 (Motion Planning): MoveIt! 与 OMPL
- ROS之利用moveit驱动机械臂
- (ros/moveit)cob_simulation報錯
- ROS下利用 moveit 控制gazebo模型并在rviz中显示的探索总结
- Given an array nums, write a function to move all 0's to the end of it while maintaining the relativ
- kinetic版本的MoveIt!教程学习一(设置助手篇)
- 在moveit中添加点云场景