ROS:关于tf的探索(4)Learning about tf and time(Python)
2016-10-14 21:35
651 查看
本教程教你使用waitForTransform函数等待变换在tf树上可用。
编辑nodes/ turtle_tf_listener.py并将lookupTransform()调用和except语句更改为:
1.tf and time
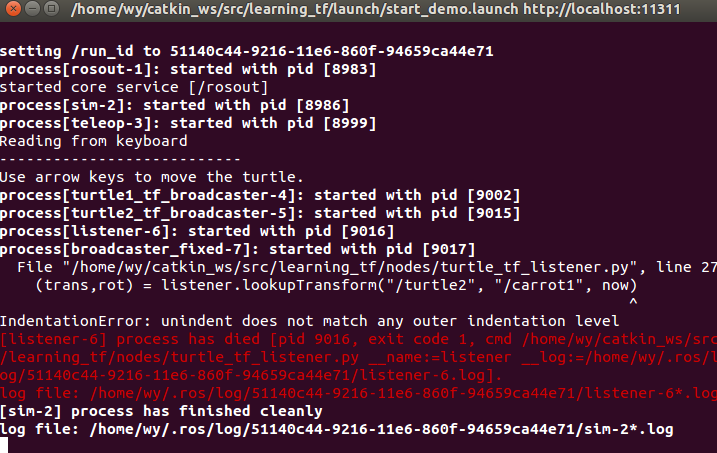
在前面的教程中,我们了解了tf如何跟踪坐标框架树。 此树随时间变化,tf为每个变换存储时间快照(默认情况下最多为10秒)。 直到现在,我们使用lookupTransform()函数来获取该tf树中最新的可用变换,而不知道什么时候记录变换。 本教程将教您如何在特定时间获取转换。编辑nodes/ turtle_tf_listener.py并将lookupTransform()调用和except语句更改为:
try:
now = rospy.Time.now()
(trans,rot) = listener.lookupTransform("/turtle2", "/carrot1", now)
except (tf.LookupException, tf.ConnectivityException):

相关文章推荐
- ROS:关于tf的探索(1) Writing a tf broadcaster(Python)
- ROS:关于tf的探索(2)Writing a tf listener(Python)
- tf教程(五):Learning about tf and time
- ROS:关于tf的探索(3)Adding a frame(Python)
- ROS Learning-021 learning_tf-05(编程) now() 和 Time(0) 的区别 (Python版)
- ROS Learning-021 learning_tf-05(编程) now() 和 Time(0) 的区别 (Python版)
- ROS Learning-014 learning_tf(编程) 坐标系变换(tf)广播员 (Python版)
- ROS Learning-022 learning_tf-06(编程) 现在与过去中穿梭 (Python版) --- waitForTransformFull() 函数
- ROS Learning-014 learning_tf(编程) 坐标系变换(tf)广播员 (Python版)
- ROS Learning-022 learning_tf-06(编程) 现在与过去中穿梭 (Python版) --- waitForTransformFull() 函数
- ROS Learning-019 learning_tf-03(编程) 添加额外的坐标系 (Python版)
- ROS Learning-019 learning_tf-03(编程) 添加额外的坐标系 (Python版)
- Data Structures and algorithm analysis—1.1 What's the book about? (数据结构1.1—关于本书)
- Python review(2) -- About importing a module and dir-operation
- 关于python的time、datetime模块的官方文档阅读
- Steve Loughran:Why not raid 0,its about time and snowflakes!!!
- python布尔类型关于and和or用法说明马克
- 8.1. datetime — Basic date and time types — Python v2.7.3 documentation
- Date and Time Representation in Python
- Python [Leetcode 121]Best Time to Buy and Sell Stock