ROS学习点滴记录(一)
2016-09-19 17:28
176 查看
9/19/2016 周一
因为项目原因需要在ros环境下使用kinectV2,所以自学ros系统官方文档,原网址http://wiki.ros.org/ROS/Tutorials/UnderstandingNodes;
本博客内容包含ros教程beginer:1,2,5,6(部分)
rosnode = ros+node : 用来获取node信息的工具
rosrun = ros+run : 从给定包中运行ros node
roscd = ros + cd
rosls = ros + ls
会出现以下场景:
可以观察turtlesim_node和turtle_teleop_key两个node之间的通信,如下:
因为项目原因需要在ros环境下使用kinectV2,所以自学ros系统官方文档,原网址http://wiki.ros.org/ROS/Tutorials/UnderstandingNodes;
本博客内容包含ros教程beginer:1,2,5,6(部分)
1.Understanding ROS Nodes
1)使用ros
$ rosrun [package_name] [node_name]//自动寻找包和node
$ rosrun turtlesim turtlesim_node __name:=my_turtle //使用__name:=可以自定义进程中node的名字
$ rosnode ping my_turtle //使用ping可以测试node是否运行
2)回顾:
roscore = ros+core : master (提供名称服务) + rosout (标准输出和标准报错) + parameter server (这个以后再讲)rosnode = ros+node : 用来获取node信息的工具
rosrun = ros+run : 从给定包中运行ros node
2.Navigating the ROS Filesystem
1)ros系统包含的文件分为两种
Packages,Manifests (package.xml)。包(packages)是库文件, 可执行文件, 脚本, 或其他文档的集合。2)文件工具:
代码会包含在多个package中,所以ros提供工具以便快速查看$ rospack find [package_name]//返回包路径
$ roscd [locationname[/subdir]]//改变当前路径至包路径/还可以添加子路径
$ roscd log//前往日志文件路径,如果当前无程序运行会报错。
$ rosls [locationname[/subdir]]返回包里面的文件
$ pwd//unix系统下用于输出当前路径
3)回顾
rospack = ros + pack(age)roscd = ros + cd
rosls = ros + ls
3.Understanding ROS Topics
1)例程:
//运行 $ rosrun turtlesim turtlesim_node $ rosrun turtlesim turtle_teleop_key
会出现以下场景:
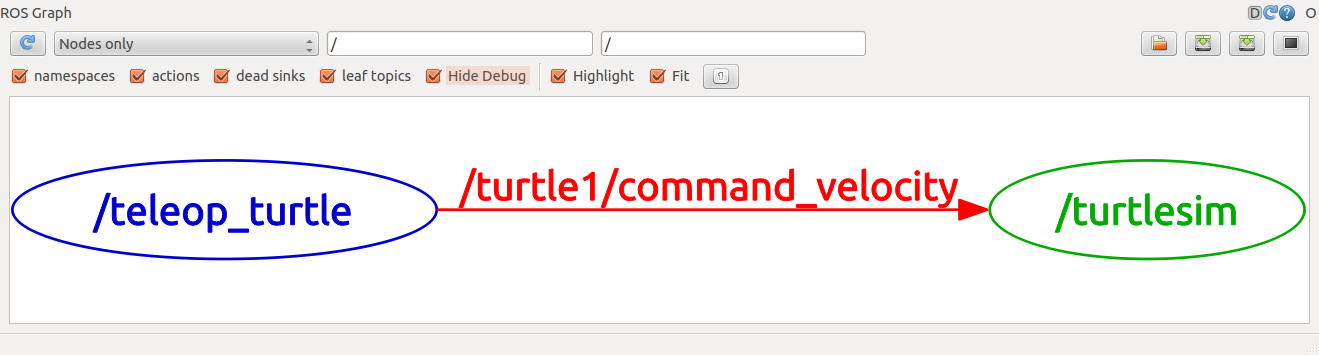
2)使用命令:
$ rosrun rqt_graph rqt_graph
可以观察turtlesim_node和turtle_teleop_key两个node之间的通信,如下:
$ rostopic list -v//可以返回所有的topic

相关文章推荐
- 记录一些平时学习的点滴
- 记录自己学习C++的点滴,(高手请指点) 偶能承受打击
- Windows内核学习点滴记录
- 真正开始记录自己学习技术过程的点滴
- ROS学习记录
- .net学习点滴记录
- CSDN博客,记录生活学习科研点滴
- Mysql学习点滴记录(1)--》数据库和表的操作
- 记录java学习的点滴
- 从今天起,用文字在51cto上记录学习点滴
- JavaScript 学习点滴记录
- 我的新浪博客--记录点滴 Linux 学习过程
- 从今天起开始涉足java的学习,记录学习的点滴
- Mysql学习点滴记录(2)--》数据的操作
- 开博,从今天开始记录IT生活的点滴和学习积累
- MFC OnFileNew OnFileOpen过程分析代码(以记录MFC学习点滴)
- 汇编学习点滴记录
- 记录java学习的点滴
- Python模块学习 ---- fileinput - 成长的点滴,记录与分享 - 博客频道 - CSDN.NET
- 写下第一篇日志,记录嵌入式学习过程的点滴