OpenCV XML和YAML文件的写入和读取
2016-08-28 09:57
239 查看
一. 实验描述
用OpenCV来进行XML和YAML文件的写入和读取。二. 实验代码
//XML和YAML文件的写入
class Task11 {
public:
void deal() {
FileStorage fs("test.xml", FileStorage::WRITE);
// FileStorage fs("test.yaml", FileStorage::WRITE);
fs << "frame_count" << 5;
time_t rawtime;
time(&rawtime);
fs << "time" << asctime(localtime(&rawtime));
Mat camera_mat = (Mat_<double>(3, 3) << 1000, 0, 320, 0, 1000, 240, 0, 0, 1);
Mat dist_coeffs = (Mat_<double>(5, 1) << 0.1, 0.01, -0.001, 0, 0);
fs << "camera_mat" << camera_mat << "dist_coeffs" << dist_coeffs;
fs << "features" << "[";
for (int i = 0; i < 3; ++i) {
int x = rand() % 640;
int y = rand() % 480;
uchar lbp = rand() % 256;
fs << "{:" << "x" << x << "y" << y << "lbp" << "[:";
for (int j = 0; j < 8; ++j) {
fs << ((lbp >> j) & 1);
}
fs << "]" << "}";
}
fs << "]";
fs.release();
printf("生成文件完毕\n");
}
};//XML和YAML文件的读取
class Task12 {
public:
void deal() {
FileStorage fs("test.xml", FileStorage::READ);
// FileStorage fs("test.yaml", FileStorage::READ);
int frame_count = fs["frame_count"]; //bug
cout << "frame_count: " << frame_count << endl;
string time;
fs["time"] >> time;
cout << "time:" << time << endl;
Mat camera_mat;
fs["camera_mat"] >> camera_mat;
cout << "camera_mat:" << camera_mat << endl;
Mat dist_coeffs;
fs["dist_coeffs"] >> dist_coeffs;
cout << "dist_coeffs:" << dist_coeffs << endl;
FileNode features = fs["features"];
FileNodeIterator it = features.begin(), it_end = features.end();
int idx = 0;
vector<uchar> ibpval;
for (; it != it_end; ++it, ++idx) {
cout << "features #" << idx << ":";
cout << "x=" << (int)(*it)["x"] << ",y=" << (int)(*it)["y"] << ",lbp:(";
(*it)["lbp"] >> ibpval;
for (int i = 0; i < ibpval.size(); ++i) {
cout << " " << (int)ibpval[i];
}
cout << ")" << endl;
}
fs.release();
}
};三. 实验结果
生成的“test.xml”文件<?xml version="1.0"?> <opencv_storage> <frame_count>5</frame_count> <time>"Sat Aug 27 22:04:44 2016 "</time> <camera_mat type_id="opencv-matrix"> <rows>3</rows> <cols>3</cols> <dt>d</dt> <data> 1000. 0. 320. 0. 1000. 240. 0. 0. 1.</data></camera_mat> <dist_coeffs type_id="opencv-matrix"> <rows>5</rows> <cols>1</cols> <dt>d</dt> <data> 1.0000000000000001e-001 1.0000000000000000e-002 -1.0000000000000000e-003 0. 0.</data></dist_coeffs> <features> <_><x>41</x> <y>227</y> <lbp> 0 1 1 1 1 1 0 1</lbp></_> <_><x>260</x> <y>449</y> <lbp> 0 0 1 1 0 1 1 0</lbp></_> <_><x>598</x> <y>78</y> <lbp> 0 1 0 0 1 0 1 0</lbp></_></features> </opencv_storage>
生成的“test.yaml”文件
%YAML:1.0
frame_count: 5
time: "Sat Aug 27 22:03:38 2016\n"
camera_mat: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 1000., 0., 320., 0., 1000., 240., 0., 0., 1. ]
dist_coeffs: !!opencv-matrix
rows: 5
cols: 1
dt: d
data: [ 1.0000000000000001e-001, 1.0000000000000000e-002,
-1.0000000000000000e-003, 0., 0. ]
features:
- { x:41, y:227, lbp:[ 0, 1, 1, 1, 1, 1, 0, 1 ] }
- { x:260, y:449, lbp:[ 0, 0, 1, 1, 0, 1, 1, 0 ] }
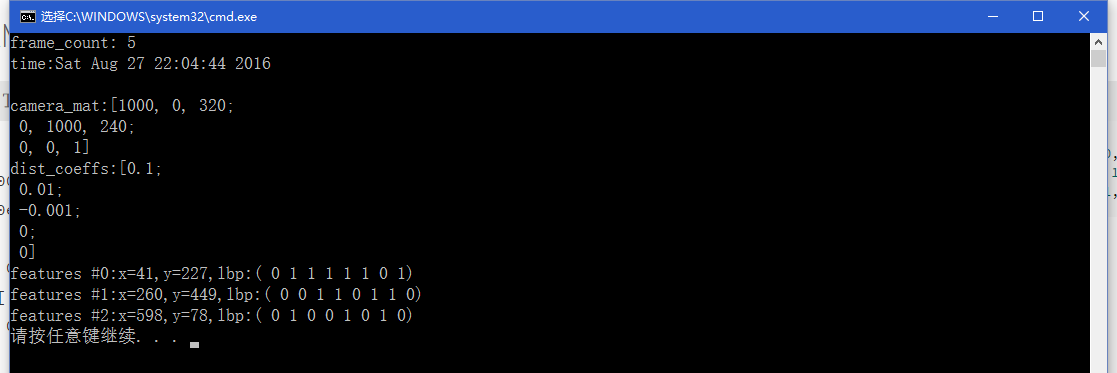
- { x:598, y:78, lbp:[ 0, 1, 0, 0, 1, 0, 1, 0 ] }读取文件效果

相关文章推荐
- Java读取/写入Yaml配置文件
- 使用FileReader和FileWriter读取写入文件内容
- IO流读取与写入文件+SQL替换更新字段脚本
- asp.net(c#)如何读取上传过程中的.txt文件中的数据,并将其写入数据库的
- txt文件读取和写入(.net)
- 文件操作:包括读取 写入 和上传。 ( 拾遗,很多知识点用的不多 都忘记了 温故而知新吧 )
- SAS技术应用-以流的方式读取、写入文件
- Asp.Net 文件操作基类(读取,删除,批量拷贝,批量删除,写入)
- Asp.Net 文件操作基类(读取,删除,批量拷贝,批量删除,写入)
- 从数据库中读取图片文件和将图片和写入到数据库中
- 文件的读取和写入
- Asp.Net 文件操作基类(读取,删除,批量拷贝,批量删除,写入)
- Asp.Net 文件操作基类(读取,删除,批量拷贝,批量删除,写入)
- jsp文件操作(新建,删除,读取,写入)
- c#大文件读取和写入数据库(带进度条的源代码)
- 用ASP读取/写入UTF-8编码格式的文件
- c#大文件读取和写入数据库
- 读取文件,解密,加密,写入文件,存储过程的应用
- 大文本文件的读取与写入
- USB通讯,检测U盘插入与卸载,并可以写入、读取文件