阴影
2016-06-30 14:52
148 查看
先说下开发环境.VS2013,C++空项目,引用glut,glew.glut包含基本窗口操作,免去我们自己新建win32窗口一些操作.glew使我们能使用最新opengl的API,因winodw本身只包含opengl 1.1版本的API,根本是不能用的.
其中矩阵计算采用gitHub项目openvr中的三份文件, Vectors.h ,Matrices.h, Matrices.cpp,分别是矢量与点类,矩阵类,我们需要的一些操作,矢量的叉乘和点乘,矩阵转置,矩阵的逆,矩阵与矢量相剩等.
这里主要简单介绍这二种阴影实现.Shadow Mapping简单来说,就是以灯光为视角,得到整个场景的深度图(深度图请看下面一段仔细说明).然后在正常视角下,把顶点转化成原灯光视角下的顶点,根据顶点位置找到深度纹理中存放的深度,如果顶点的深度值大于纹理中的深度值(说明在灯光视角中,顶点上有遮挡物,如下图),说明在阴影范围内.
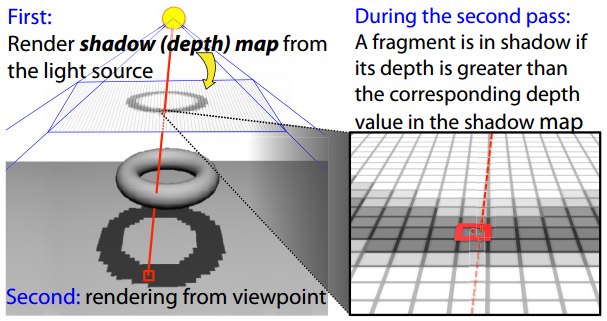
(此图引用博友http://www.cnblogs.com/liangliangh/p/4131103.html中图片)
在这里,有必要讲一下深度图,不然有些位置大家可能理解不了,这个深度图是全屏渲染图,意思就是是场景中的三维物体经过投影成二维,这样就达到一种效果,纹理坐标与三维物体的坐标是有对应关系的,简单来说,三维物体经过投影后,我们经过(xyzw)/w,这样x,y,z 都在(-1,1)之间,再经过乘0.5加0.5后对应(0,1)之间,也就是深度图的纹理坐标,这过程和3D中物体由局部坐标到屏幕坐标的变换(屏幕Y是从上到下,还需要转换,这里先不说)一样.那么深度图一共包含了二样关系,一是纹理坐标st,对应3维中顶点xy.二是深度图本身保存的深度,这个深度是经过深度测试和深度写入(所以这二个GL_DEPTH_TEST,
glDepthMask记的打开)的深度,默认的是深度比较算法是画家算法(GL_LESS,不要改),意思是深度度上全是最近的深度.
这样深度图就是一个三维场景,结合摄像机的设置,就可以把这个场景所有像素都重新投影到三维空间中去.
在附件中, Shadow Mapping主要有二种实现,一种是固定管线,一种是可编程管线,我们先看下固定管线的实现流程,再对比可编程管线的实现来理解整个过程.
如下是固定管线中纹理初始化的设置.

阴影纹理初始化
其中有几个主要设置拿出来说下:
glTexParameteri(GL_TEXTURE_2D, GL_DEPTH_TEXTURE_MODE, GL_LUMINANCE);
这个是让纹理值替换深度到那些分量上,我们知道纹理一个像素是4分量,分别是rgba,其中GL_LUMINANCE把深度复制到rgb中, GL_INTENSITY 则是rgba中, GL_ALPHA复制到a中,这个我试了,在固定管线下,不设置也行,在可管程管线中,则要根据设置的值取不同的分量.
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_COMPARE_MODE, GL_COMPARE_R_TO_TEXTURE);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_COMPARE_FUNC, GL_LEQUAL);
这二设定一个是指明纹理是是引用贴图对比模式,指明纹理坐标R(strq,r是纹理第三分量)对比纹理本身的值.第二个设置是第一对比模式的补充,说明小于或等于是1,而大于是0.
最后glTexGeni指明纹理坐标生成方式, GL_OBJECT_LINEAR指明是在模型空间内,顶点坐标拿来纹理坐标.
在这里,我们把桢缓冲区的数据转出到纹理,采用的是FBO的方式,如果硬件不能使用FBO,大家可以改写用Pbuffer或CopyPixels的方式.
然后在渲染时,我们首先以灯光做为视点,生成视图坐标,选择一个合适的透视矩阵,输出深度到深度纹理中.
输出深度到纹理
然后我们需要记录当前MVP矩阵,在前面说过,MVP后要转化(-1,1)到(0,1),所以前面还需要*0.5+0.5.纹理坐标生成采用GL_OBJECT_LINEAR,下面为了glTexGenfv传参方便,我们转置一下矩阵.这样顶点经过这个转换后,自动生成的纹理坐标其实是对应的原灯光视图下的顶点.
纹理坐标转化矩阵
最后我们正常输出场景,在这里,记得前面设定的GL_COMPARE_R_TO_TEXTURE不,纹理坐标大于纹理深度值则是阴影.
正常输出
说起来就是这么回事,但是仔细回想下,其实完全都是由openGL内部实现,我们完全搞不清楚真的是怎么实现的,我们用的也是一些API,大家可能也对实现过程N多疑惑,那么下面可编程管线实现的Shadow Mapping能让我们完全搞清楚怎么回事,也没有这些GL_COMPARE_R_TO_TEXTURE, GL_LEQUAL,纹理坐标自动生成这些完全不知道内部操作的设定.
首先我们需要对Plane改写,支持VBO渲染,增加一个类glslprogram用于管理着色器相关.
plane
VBO输出
下面是可编程管线的初始化代码.
可编程管线
深度纹理初始化
可以发现,少了很多前面单独拿出来说的设定,这里只是让FBO把深度输出到纹理中,纹理中用float保存.
输出FBO同上面一样,不同的正常输出场景,在这里,我们设定好着色器相关的参数.传入顶点着色器中.
glsl
正常输出
glsl
顶点着色器
我们可以看到oShadowTexCoord代表顶点(这是正常场景坐标)转化成原灯光视图下的坐标.并转化到(0,1)之间,然后到像素着色器中.
glsl
像素着色器
在像素着色器中,纹理坐标st取出深度值a(前面我设定GL_DEPTH_TEXTURE_MODE为GL_ALPHA,想一下,取r,g,b会不会有效果),然后比较纹理坐标r与纹理值来判断是否有阴影.其中有一段光照代码,在这就没必要看了,只要知道生成光照就行了,在像素着色器中,阴影显示成什么颜色我们能也完全控制了,通过着色器代码的实现,我们应该很清楚Shadow
Mapping是如何工作的了.
当然在可编程管线下,我们一样是可以使用GL_TEXTURE_COMPARE_MODE- GL_COMPARE_R_TO_TEXTURE的,这样我们需要把sampler2D改写成sampler2Dshadow,用纹理坐标取出来的深度值就只有0和1了,OpenGL自己帮我们比较了,为0则表示GL_LEQUAL失败,在阴影中.
说完了Shadow Mapping,我们来了解下Shadow Volumes的原理,如下图:
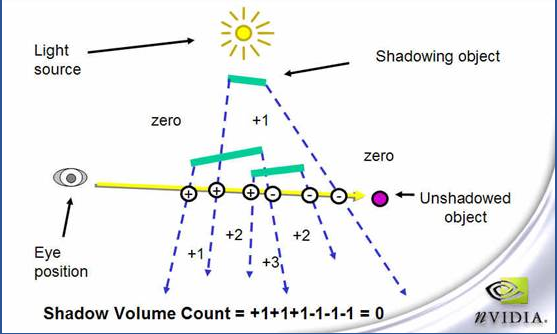
简单来说,就是在灯光与顶点扩展成锥体形式,进入锥体就加模板值1,出去锥体就减模板值1,最后判断模板值不为0则是阴影区域,原理可以比说Shadow Mapping还简单,确实Shadow Volumes难的不是理念,更多是如何形成有效简便的锥体结构.在这说,我们主要讲解Shadow Volumes是工作原理,故采用二来简单的三角形来说明.
在说明代码之前,我们需要先了解模版缓冲区与模版测试.模版测试属于片断处理,在像素着色器之后,先进行Alpha测试后就是模版测试,模版测试后是深度测试,记的模版测试在片断着色器之后,深度测试之前,这个测试针对的就是模版缓冲区,你可以把模版缓冲区当做和深度缓冲区差不多的东东,每个像素有一个模板值,初始我们一般设为0,有API能对此进行操作.然后我们还需要知道在opengl中,我们把逆时针连接的面称为正面,另一面就是反面.
Shadow Volumes简单来说,一般包含三次Pass.三次Pass都需要开启深度测试.
第一次我们正常渲染模型.先清空颜色,深度,模版缓冲区,然后打开深度缓冲区可写.先不用打开模版测试.(注意glut也需要在窗口初始化时传入模板参数)
Shadow
Volumes正常渲染模型
第二次我们得到阴影区,关闭颜色缓冲区可写,关闭深度缓冲区可写(注意深度测试还是打开的,意思可以比较现在写入的深度与以前的深度,但是不会更新到深度缓冲区),打开模版测试,重置模板缓冲区内所有数据为0,设定模板测试直接通过,模板缓冲区操作时设定,正面通过深度缓冲区后加1,反面通过测试缓冲区减1. 注意前面说的,深度测试在模板测试之后,模板测试通过了才有深度测试,在这里,我们设定模板直接通过,深度测试不通过不修改,只有模板与深度全通对模板缓冲区修改,所以也叫zpass算法.
下面三图分别指示正面通过(+1),反面通过(-1)和正反相加的情形:


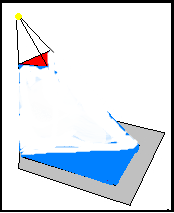
前二图是在http://www.yakergong.net/blog/archives/23 中的,不知为啥没给出我想要的第三图,我就自己画了,第一张图上淡蓝色是正面(截体外面)通过深度测试的像素(模板加1),第二张图是背面通过深度测试的像素(模板减1),第三张图就是模板值还是1的像素,也就是我们的阴影区域.从上图知,通过第一张图(正面测试的)像素个数是第二和第三张图之和,我们可以验证.
得到阴影区域
有些读取模板取的代码在上面屏掉,大家可以分别测试glStencilOpSeparate中的1:GL_FRONT启用,2:GL_BACK启用,3二者都启用,看看是否第一种情况的像素值是第二和第三之和.
第三次Pass,渲染上面的阴影区.下面的一些状态我就不仔细说了,代码里有注释,主要是打开模板测试,把整个屏幕刷黑,但是只有模板值为1的像素才能通过测试,更新颜色到桢缓冲区.
渲染阴影区域
zpass主要就是上面的过程,不过有个缺点,就是视点进入到了 shadow volume 里面后,zpass算法就失效了,大家可以移步[转]阴影锥原理与展望—真实的游戏效果的实现里有详细说明.在此基础上,几个牛人研究出了zfail方法.原理如下图:

如前面所说,深度测试在模板测试之后,模板测试通过了才有深度测试,如果模板测试通过,深度测试不通过,zfail就是在这步针对模板值修改,因其与zpass大部分相同,只是在第二步pass得到阴影区域的计算不同,故只贴出这部分代码.
zfail得到阴影区
参考:
Shadow
Map阴影贴图技术之探系列
Shadow
Volume 阴影锥技术之探系列
OpenGL阴影,Shadow
Mapping(附源程序)
OpenGL阴影,Shadow
Volumes(附源程序,使用 VCGlib )
[转]阴影锥原理与展望—真实的游戏效果的实现
Shadow
Volume(阴影锥)技术详解
下面是附件,其中camera提供第一人称与第三人称摄像机实现,loadtexture实现了bmp图片文件的导入,plane与sphere分别对应平面与球的实现,其中window原本是打算用win32实现,后面用glut代替,sample开头的文件分别对应shadow mapping固定管线,可编程管线与shadow volume中的zpass与zfail实现,这四个类分别是glshow的子类,在main中,直接修改glshow分别是那种子类,就能看各个效果.引用的头文件与lib,dll全放入lib文件夹下,其中二个dll文件在32位操作环境放入C:\Windows\System32,64位操作系统放入C:\Windows\SysWOW64.
附件:OpenglTest.zip 打不开或是出错请联系我.
其中矩阵计算采用gitHub项目openvr中的三份文件, Vectors.h ,Matrices.h, Matrices.cpp,分别是矢量与点类,矩阵类,我们需要的一些操作,矢量的叉乘和点乘,矩阵转置,矩阵的逆,矩阵与矢量相剩等.
这里主要简单介绍这二种阴影实现.Shadow Mapping简单来说,就是以灯光为视角,得到整个场景的深度图(深度图请看下面一段仔细说明).然后在正常视角下,把顶点转化成原灯光视角下的顶点,根据顶点位置找到深度纹理中存放的深度,如果顶点的深度值大于纹理中的深度值(说明在灯光视角中,顶点上有遮挡物,如下图),说明在阴影范围内.
(此图引用博友http://www.cnblogs.com/liangliangh/p/4131103.html中图片)
在这里,有必要讲一下深度图,不然有些位置大家可能理解不了,这个深度图是全屏渲染图,意思就是是场景中的三维物体经过投影成二维,这样就达到一种效果,纹理坐标与三维物体的坐标是有对应关系的,简单来说,三维物体经过投影后,我们经过(xyzw)/w,这样x,y,z 都在(-1,1)之间,再经过乘0.5加0.5后对应(0,1)之间,也就是深度图的纹理坐标,这过程和3D中物体由局部坐标到屏幕坐标的变换(屏幕Y是从上到下,还需要转换,这里先不说)一样.那么深度图一共包含了二样关系,一是纹理坐标st,对应3维中顶点xy.二是深度图本身保存的深度,这个深度是经过深度测试和深度写入(所以这二个GL_DEPTH_TEST,
glDepthMask记的打开)的深度,默认的是深度比较算法是画家算法(GL_LESS,不要改),意思是深度度上全是最近的深度.
这样深度图就是一个三维场景,结合摄像机的设置,就可以把这个场景所有像素都重新投影到三维空间中去.
在附件中, Shadow Mapping主要有二种实现,一种是固定管线,一种是可编程管线,我们先看下固定管线的实现流程,再对比可编程管线的实现来理解整个过程.
如下是固定管线中纹理初始化的设置.
阴影纹理初始化
其中有几个主要设置拿出来说下:
glTexParameteri(GL_TEXTURE_2D, GL_DEPTH_TEXTURE_MODE, GL_LUMINANCE);
这个是让纹理值替换深度到那些分量上,我们知道纹理一个像素是4分量,分别是rgba,其中GL_LUMINANCE把深度复制到rgb中, GL_INTENSITY 则是rgba中, GL_ALPHA复制到a中,这个我试了,在固定管线下,不设置也行,在可管程管线中,则要根据设置的值取不同的分量.
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_COMPARE_MODE, GL_COMPARE_R_TO_TEXTURE);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_COMPARE_FUNC, GL_LEQUAL);
这二设定一个是指明纹理是是引用贴图对比模式,指明纹理坐标R(strq,r是纹理第三分量)对比纹理本身的值.第二个设置是第一对比模式的补充,说明小于或等于是1,而大于是0.
最后glTexGeni指明纹理坐标生成方式, GL_OBJECT_LINEAR指明是在模型空间内,顶点坐标拿来纹理坐标.
在这里,我们把桢缓冲区的数据转出到纹理,采用的是FBO的方式,如果硬件不能使用FBO,大家可以改写用Pbuffer或CopyPixels的方式.
然后在渲染时,我们首先以灯光做为视点,生成视图坐标,选择一个合适的透视矩阵,输出深度到深度纹理中.
输出深度到纹理
然后我们需要记录当前MVP矩阵,在前面说过,MVP后要转化(-1,1)到(0,1),所以前面还需要*0.5+0.5.纹理坐标生成采用GL_OBJECT_LINEAR,下面为了glTexGenfv传参方便,我们转置一下矩阵.这样顶点经过这个转换后,自动生成的纹理坐标其实是对应的原灯光视图下的顶点.
纹理坐标转化矩阵
最后我们正常输出场景,在这里,记得前面设定的GL_COMPARE_R_TO_TEXTURE不,纹理坐标大于纹理深度值则是阴影.
正常输出
说起来就是这么回事,但是仔细回想下,其实完全都是由openGL内部实现,我们完全搞不清楚真的是怎么实现的,我们用的也是一些API,大家可能也对实现过程N多疑惑,那么下面可编程管线实现的Shadow Mapping能让我们完全搞清楚怎么回事,也没有这些GL_COMPARE_R_TO_TEXTURE, GL_LEQUAL,纹理坐标自动生成这些完全不知道内部操作的设定.
首先我们需要对Plane改写,支持VBO渲染,增加一个类glslprogram用于管理着色器相关.
plane
VBO输出
下面是可编程管线的初始化代码.
可编程管线
深度纹理初始化
可以发现,少了很多前面单独拿出来说的设定,这里只是让FBO把深度输出到纹理中,纹理中用float保存.
输出FBO同上面一样,不同的正常输出场景,在这里,我们设定好着色器相关的参数.传入顶点着色器中.
glsl
正常输出
glsl
顶点着色器
我们可以看到oShadowTexCoord代表顶点(这是正常场景坐标)转化成原灯光视图下的坐标.并转化到(0,1)之间,然后到像素着色器中.
glsl
像素着色器
在像素着色器中,纹理坐标st取出深度值a(前面我设定GL_DEPTH_TEXTURE_MODE为GL_ALPHA,想一下,取r,g,b会不会有效果),然后比较纹理坐标r与纹理值来判断是否有阴影.其中有一段光照代码,在这就没必要看了,只要知道生成光照就行了,在像素着色器中,阴影显示成什么颜色我们能也完全控制了,通过着色器代码的实现,我们应该很清楚Shadow
Mapping是如何工作的了.
当然在可编程管线下,我们一样是可以使用GL_TEXTURE_COMPARE_MODE- GL_COMPARE_R_TO_TEXTURE的,这样我们需要把sampler2D改写成sampler2Dshadow,用纹理坐标取出来的深度值就只有0和1了,OpenGL自己帮我们比较了,为0则表示GL_LEQUAL失败,在阴影中.
说完了Shadow Mapping,我们来了解下Shadow Volumes的原理,如下图:
简单来说,就是在灯光与顶点扩展成锥体形式,进入锥体就加模板值1,出去锥体就减模板值1,最后判断模板值不为0则是阴影区域,原理可以比说Shadow Mapping还简单,确实Shadow Volumes难的不是理念,更多是如何形成有效简便的锥体结构.在这说,我们主要讲解Shadow Volumes是工作原理,故采用二来简单的三角形来说明.
在说明代码之前,我们需要先了解模版缓冲区与模版测试.模版测试属于片断处理,在像素着色器之后,先进行Alpha测试后就是模版测试,模版测试后是深度测试,记的模版测试在片断着色器之后,深度测试之前,这个测试针对的就是模版缓冲区,你可以把模版缓冲区当做和深度缓冲区差不多的东东,每个像素有一个模板值,初始我们一般设为0,有API能对此进行操作.然后我们还需要知道在opengl中,我们把逆时针连接的面称为正面,另一面就是反面.
Shadow Volumes简单来说,一般包含三次Pass.三次Pass都需要开启深度测试.
第一次我们正常渲染模型.先清空颜色,深度,模版缓冲区,然后打开深度缓冲区可写.先不用打开模版测试.(注意glut也需要在窗口初始化时传入模板参数)
Shadow
Volumes正常渲染模型
第二次我们得到阴影区,关闭颜色缓冲区可写,关闭深度缓冲区可写(注意深度测试还是打开的,意思可以比较现在写入的深度与以前的深度,但是不会更新到深度缓冲区),打开模版测试,重置模板缓冲区内所有数据为0,设定模板测试直接通过,模板缓冲区操作时设定,正面通过深度缓冲区后加1,反面通过测试缓冲区减1. 注意前面说的,深度测试在模板测试之后,模板测试通过了才有深度测试,在这里,我们设定模板直接通过,深度测试不通过不修改,只有模板与深度全通对模板缓冲区修改,所以也叫zpass算法.
下面三图分别指示正面通过(+1),反面通过(-1)和正反相加的情形:
前二图是在http://www.yakergong.net/blog/archives/23 中的,不知为啥没给出我想要的第三图,我就自己画了,第一张图上淡蓝色是正面(截体外面)通过深度测试的像素(模板加1),第二张图是背面通过深度测试的像素(模板减1),第三张图就是模板值还是1的像素,也就是我们的阴影区域.从上图知,通过第一张图(正面测试的)像素个数是第二和第三张图之和,我们可以验证.
得到阴影区域
有些读取模板取的代码在上面屏掉,大家可以分别测试glStencilOpSeparate中的1:GL_FRONT启用,2:GL_BACK启用,3二者都启用,看看是否第一种情况的像素值是第二和第三之和.
第三次Pass,渲染上面的阴影区.下面的一些状态我就不仔细说了,代码里有注释,主要是打开模板测试,把整个屏幕刷黑,但是只有模板值为1的像素才能通过测试,更新颜色到桢缓冲区.
渲染阴影区域
zpass主要就是上面的过程,不过有个缺点,就是视点进入到了 shadow volume 里面后,zpass算法就失效了,大家可以移步[转]阴影锥原理与展望—真实的游戏效果的实现里有详细说明.在此基础上,几个牛人研究出了zfail方法.原理如下图:
如前面所说,深度测试在模板测试之后,模板测试通过了才有深度测试,如果模板测试通过,深度测试不通过,zfail就是在这步针对模板值修改,因其与zpass大部分相同,只是在第二步pass得到阴影区域的计算不同,故只贴出这部分代码.
zfail得到阴影区
参考:
Shadow
Map阴影贴图技术之探系列
Shadow
Volume 阴影锥技术之探系列
OpenGL阴影,Shadow
Mapping(附源程序)
OpenGL阴影,Shadow
Volumes(附源程序,使用 VCGlib )
[转]阴影锥原理与展望—真实的游戏效果的实现
Shadow
Volume(阴影锥)技术详解
下面是附件,其中camera提供第一人称与第三人称摄像机实现,loadtexture实现了bmp图片文件的导入,plane与sphere分别对应平面与球的实现,其中window原本是打算用win32实现,后面用glut代替,sample开头的文件分别对应shadow mapping固定管线,可编程管线与shadow volume中的zpass与zfail实现,这四个类分别是glshow的子类,在main中,直接修改glshow分别是那种子类,就能看各个效果.引用的头文件与lib,dll全放入lib文件夹下,其中二个dll文件在32位操作环境放入C:\Windows\System32,64位操作系统放入C:\Windows\SysWOW64.
附件:OpenglTest.zip 打不开或是出错请联系我.

相关文章推荐
- pentaho安装
- JavaScript技巧
- JavaScript技巧
- JavaScript技巧
- apt-get与dpkg
- JavaScript技巧
- 关于stm32报错Library reports error: __use_no_semihosting was requested
- JavaScript技巧
- JavaScript技巧
- JavaScript技巧
- iOS中修改导航栏的各种样式
- 关于用strace工具定位vrrpd进程有时会挂死的bug
- MyEclipse 2016 CI 4新增BootStrap模板
- js源码保护
- 前端学习总览
- Maven+SpringMVC+MyBatis的环境搭建(一)
- JavaScript技巧
- JavaScript技巧
- JavaScript技巧
- JavaScript技巧