Linux环境下字符设备驱动开发入门
2016-06-09 10:53
633 查看
前言
这篇文章主要总结了我学习嵌入式系统中,一个字符设备驱动的构建和运行过程。这篇总结中我会尽量简洁地告诉你在Ubuntu(Linux)中字符设备驱动的编程方式,一个简单的模块用C如何进行构建,并且如何将它作为内核模块动态地加载和卸载,你能够看到这个字符驱动设备在系统日志中的记录。在这篇当中,我们会将重点放在程序结构和编译运行加载过程,关于字符设备和环境等等将不做详细介绍。
主要内容
字符设备驱动的主要结构和编写字符设备驱动的Makefile编写
将驱动作为动态模块进行加载
为了简洁明了,我们以一个加载时和卸载时候打印hello的驱动为例进行说明。
字符驱动的结构
首先需要声明该设备的主设备号TEST_MAJOR和设备名称
drv_name。
其次实现关于设备的函数,一般包括
open(),
release(),
read(),
write(),后面用户操作的时候,kernel实际会调用 这些函数。
声明一个
file_operation结构体,然后使用标记化结构初始化语法进行初始化(关于这个可以参考标记化结构初始化,C Primer Plus中也有较为详细的介绍,请参考结构相关章节)。这一步的操作将结构体中的内容和我们的实现函数进行一次“绑定”。
实现
init()函数,并且在函数内使用
register_chrdev(TEST_MAJOR,drv_name,&chardev_fops)函数进行设备号的注册;
实现
exit()函数,并在函数内部使用
unregister_chrdev(TEST_MAJOR,drv_name,&chardev_fops)函数对设备进行注销操作。
最后记得使用
module_init(test_init);module_exit(test_exit);将设备看作模块进行注册注销关联。
下面我们将给出这个hello.c程序:
#include<linux/module.h>
#include<linux/kernel.h>
#include<linux/init.h>
#include<linux/fs.h>
#define TEST_MAJOR 233 //定义主设备号
static char drv_name[] = "test"; //定义主设备名
//自己实现的打开函数
static int test_chardev_open(struct inode *inode,struct file *file)
{
printk("open major=%d, minor=%d\n", imajor(inode), iminor(inode));
return 0;
}
//自己实现的释放函数
static int test_chardev_release(struct inode *inode,struct file *file )
{
printk("close major=%d, minor=%d\n", imajor(inode), iminor(inode));
return 0;
}
//标记化结构体初始化
static struct file_operations chardev_fops={
.owner = THIS_MODULE,
.open = test_chardev_open,
.release = test_chardev_release,
};
//初始化注册设备
static int __init test_init(void)
{
printk("Hello Mr.Bubbles\n");
if(register_chrdev(TEST_MAJOR,drv_name,&chardev_fops))
{
printk("fail to register device \n");
return -1;
}
return 0;
}
//注销设备
static void __exit test_exit(void)
{
printk("Goodbye,Mr.Bubbles!\n");
unregister_chrdev(TEST_MAJOR,drv_name);
}
//进行关联
module_init(test_init);
module_exit(test_exit);
//声明许可证
MODULE_LICENSE("GPL");字符驱动的Makefile文件
我们直接放上Makefile文件的代码:obj-m := hello.o KERNELDIR := /lib/modules/4.4.0-22-generic/build PWD := $(shell pwd) modules: $(MAKE) -C $(KERNELDIR) M=$(PWD) modules modules_install: $(MAKE) -C $(KERNELDIR) M=$(PWD) modules_install clean: rm –rf *.o *~ core .depend . *.cmd *.ko *.mod.c .tmp_versions
在这里我们需要声明以下内核所在的位置,因为我们的驱动将作为一个模块单独编译进内核中去。
-C进入内核目录,
M返回当前模块的目录。关于详细的驱动Makefile中的细节,给出以下的参考文章:
1. Linux下的makefile编写详解
2. Linux内核模块的编译基础知识
3. linux设备驱动makefile入门解析
4. 内核 __init与__exit
5. linux内核及驱动开发中有关__init,__exit和__initdata的用法
编译、加载和卸载模块
我们的驱动编写工作可以说是进入了收尾阶段,下面就需要进行编译和加载。首先这是未编译的状态:
然后我们执行
make指令:
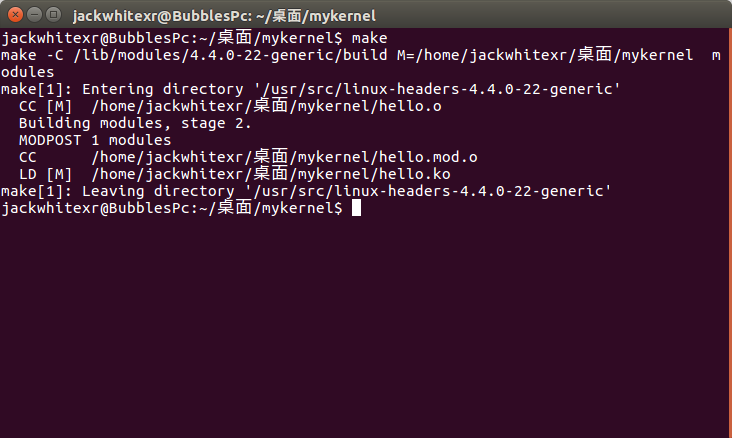
这里我们可以清楚的看到shell进入了内核执行了makefile然后回到当前目录生成ko文件。这个就是我们的模块文件。在当前目录下我们执行
insmod指令就可以将我们的模块动态进行加载。
这里的效果我们需要通过系统日志才能看到,打开/var/log/syslog文件就可以看到(中间的“Hello,Mr.Bubbles”):

然后我们尝试进行卸载,使用
rmmod就可以卸载当前的模块 :
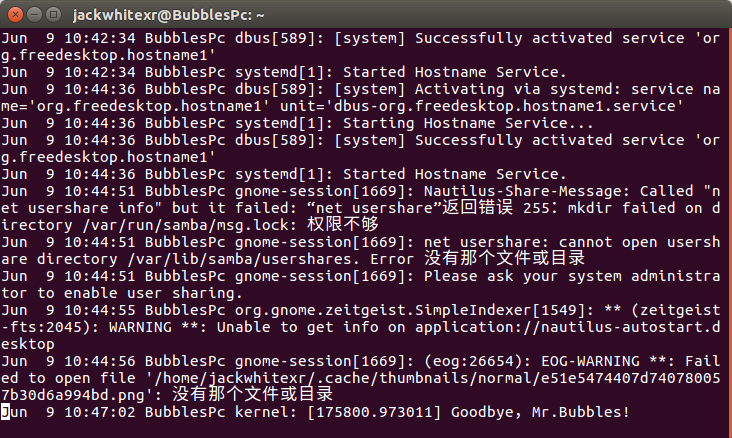
最终模块被成功卸载,显示“Goodbye,Mr.Bubbles!”字样。
小结
虽然是考试前的复习,但是如果不自己动手亲自写一下的话是体会不到其中的乐趣的,当然这个介绍只是一点简单的总结,很多细节都被略过了,要对其有更好地了解还需要自行补更多的知识,当然,Embedded System还有很多好玩的东西,希望这篇可以帮助我回顾,同时与大家共勉。欢迎提出各种意见和建议,共勉。
对了,以前扒数据就发现有直接粘贴不贴出处的,这样可不好啊,这些人注意下0_0

相关文章推荐
- Ubuntu 默认壁纸历代记
- Ubuntu Remix Cinnamon 20.04 评测:Ubuntu 与 Cinnamon 的完美融合
- Linux socket 初步
- 关于Ubuntu 11.10启动提示waiting for the network configuration的问题
- 在 Ubuntu 桌面中使用文件和文件夹
- Linux Kernel 4.0 RC5 发布!
- linux lsof详解
- linux 文件权限
- Linux 执行数学运算
- 10 篇对初学者和专家都有用的 Linux 命令教程
- 如何组织构建多文件 C 语言程序(二)
- Linux 与 Windows 对UNICODE 的处理方式
- Ubuntu12.04下QQ完美走起啊!走起啊!有木有啊!
- 解決Linux下Android开发真机调试设备不被识别问题
- ubuntu下chrome无法同步问题解决
- 运维入门
- 运维提升
- Linux 自检和 SystemTap