机器人学 —— 轨迹规划(Configuration Space)
2016-05-28 13:50
246 查看
之前的轨迹规划中,我们只考虑了质点,没有考虑机器人的外形与结构。直接在obstacle map 中进行轨迹规划,然而世纪情况中,机器人有固定外形,可能会和障碍物发生碰撞。此情况下,我们针对机器人自由度进行建模,给定其运动空间,如果是扫地机器人,那么其自由度是x-y的平移,如果是N自由度机械臂,其自由度是电机转角,我们针对此自由度,构建Configuration Space 并在其中使用A* 或者DJ 算法进行轨迹规划。
View Code
此算法的缺点是非常非常慢。而且由于需要使用流进行判断,不方便GPU并行处理。我正在思考如何利用异构并行实现碰撞检测。
P{1} = P1;
P{2} = P2;
linesP1(1,:) = cross([P1(2,:) 1],[P1(3,:) 1]);
linesP1(2,:) = cross([P1(1,:) 1],[P1(3,:) 1]);
linesP1(3,:) = cross([P1(1,:) 1],[P1(2,:) 1]);
Lines{1} = linesP1;
linesP2(1,:) = cross([P2(2,:) 1],[P2(3,:) 1]);
linesP2(2,:) = cross([P2(1,:) 1],[P2(3,:) 1]);
linesP2(3,:) = cross([P2(1,:) 1],[P2(2,:) 1]);
Lines{2} = linesP2;
Result_Judge = zeros(3,1);
lines = Lines{1};
for line_idx = 1:3
line = lines(line_idx,:);
Point_Tri = [P{1}(line_idx,:) 1]*line';
for point_idx = 1:3
Result_Judge(point_idx) = [P{2}(point_idx,:) 1]*line';
end
if Point_Tri>0 && all(Result_Judge<0)
flag = false;
return
elseif Point_Tri<0 && all(Result_Judge>0)
flag = false;
return
end
end
lines = Lines{2};
for line_idx = 1:3
line = lines(line_idx,:);
Point_Tri = [P{2}(line_idx,:) 1]*line';
for point_idx = 1:3
Result_Judge(point_idx) = [P{1}(point_idx,:) 1]*line';
end
if Point_Tri>0 && all(Result_Judge<0)
flag = false;
return
elseif Point_Tri<0 && all(Result_Judge>0)
flag = false;
return
end
end
flag = true;View Code
此算法的缺点是非常非常慢。而且由于需要使用流进行判断,不方便GPU并行处理。我正在思考如何利用异构并行实现碰撞检测。
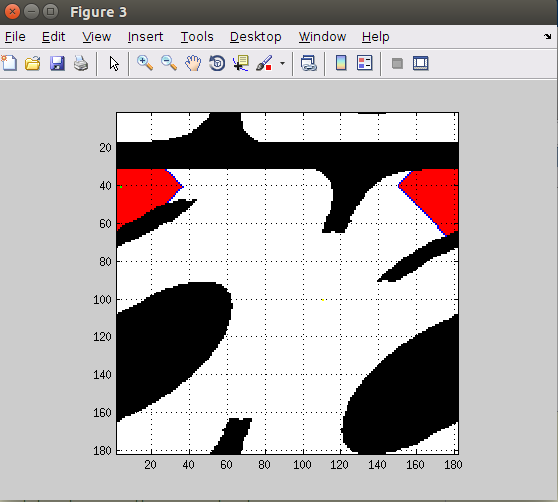
2、轨迹规划
对于机械臂而言,轨迹规划算法与平面机器人差异并不大,但是需要注意的是,机械臂的关节角可以认为是360度的。具体体现在可以从Configuration Space 的另一头穿越出来。如下:

相关文章推荐
- [ZooKeeper]ZooKeeper的会话状态
- 关于platform中的id_table
- Android提高篇 - 如何安全退出已调用多个Activity的Application?
- Dubbo监控中心的介绍与简易监控中心的安装
- android学习笔记-Activity之间传值的3种方法
- Google:Andriod 系统前景不容乐观
- 多线程加强之线程解析
- 远程连接腾讯云Centos系统的MySQL数据库
- 谈谈数据结构课后作业......尴尬不已...《图》 后面的迷宫问题
- c++实现集合的交并差集
- 第十三周上机实践——项目2-动物这样叫-(1)
- Tomcat中部署web应用 ---- Dubbo服务消费者Web应用war包的部署
- JAVA 巧用List
- !!“理都懂”为什么“然并卵”?
- 百度贴吧爬虫---药科大学贴吧的用户信息爬取
- linux下jiffies定时器和hrtimer高精度定时器
- CentOS 6.2下搭建Web服务器
- 1031. 查验身份证(15)
- 生成学习算法
- 大道至简阅读笔记03