DH参数法建立机器人的运动学正解
2016-04-21 23:32
295 查看
DH参数法建立机器人的运动学正解
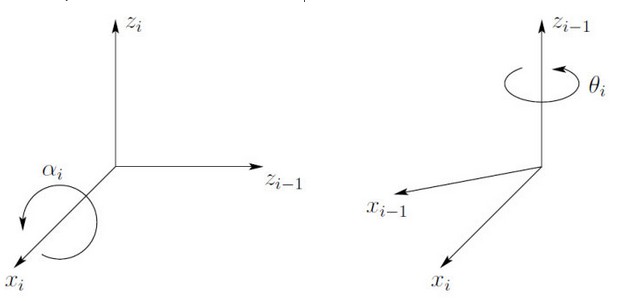
运用DH参数法时坐标系建立的两个约定:
(1)x_i与z_(i-1)垂直
(2)x_i与z_(i-1)相交
坐标系i与坐标系i-1的其次变换矩阵为:
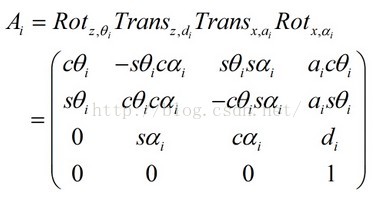
a为两z轴的距离,d为两x轴的距离。
alpha与theta的正方向约定为:
下面举三个例子:
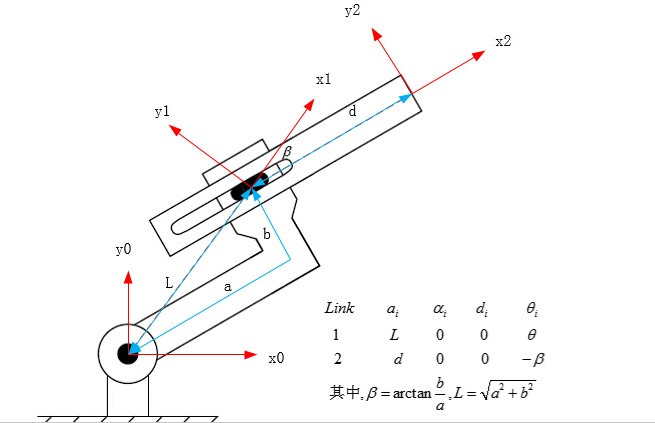
a、平面二自由度机器人
clear;
clc;
syms theta1 alpha1 a1 d1 theta2 alpha2 a2 d2 a b theta d;
A1=[cos(theta1),-sin(theta1)*cos(alpha1),sin(theta1)*sin(alpha1),a1*cos(theta1);...
sin(theta1),cos(theta1)*cos(alpha1),-cos(theta1)*sin(alpha1),a1*sin(theta1);...
0,sin(alpha1),cos(alpha1),d1;...
0,0,0,1];
A2=[cos(theta2),-sin(theta2)*cos(alpha2),sin(theta2)*sin(alpha2),a2*cos(theta2);...
sin(theta2),cos(theta2)*cos(alpha2),-cos(theta2)*sin(alpha2),a2*sin(theta2);...
0,sin(alpha2),cos(alpha2),d2;...
0,0,0,1];
L=sqrt(a^2+b^2);
beta=atan(b/a);
a1=L;
alpha1=sym(0);
d1=sym(0);
theta1=theta;
a2=d;
alpha2=sym(0);
d2=sym(0);
theta2=-beta;
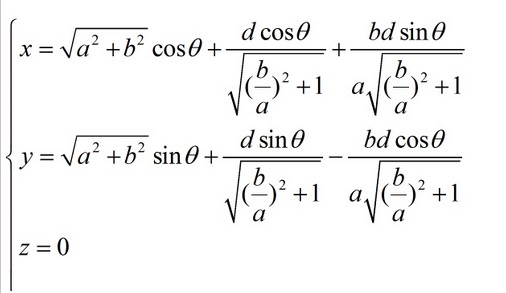
T=eval_r(A1*A2)
求得运动学正解为:
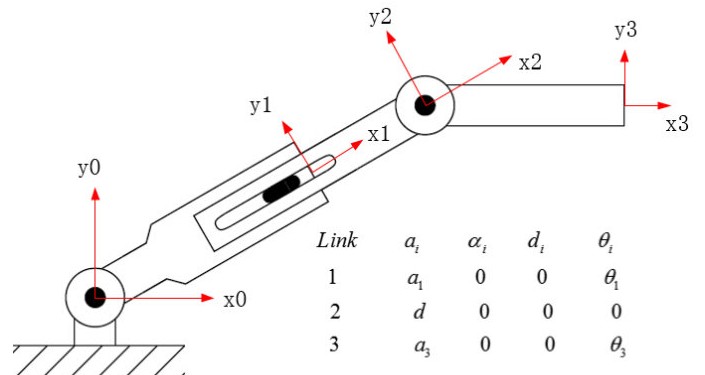
b、平面三自由度机器人
clear;
clc;
syms theta1 alpha1 a1 d1 theta2 alpha2 a2 d2 theta3 alpha3 a3 d3 d;
A1=[cos(theta1),-sin(theta1)*cos(alpha1),sin(theta1)*sin(alpha1),a1*cos(theta1);...
sin(theta1),cos(theta1)*cos(alpha1),-cos(theta1)*sin(alpha1),a1*sin(theta1);...
0,sin(alpha1),cos(alpha1),d1;...
0,0,0,1];
A2=[cos(theta2),-sin(theta2)*cos(alpha2),sin(theta2)*sin(alpha2),a2*cos(theta2);...
sin(theta2),cos(theta2)*cos(alpha2),-cos(theta2)*sin(alpha2),a2*sin(theta2);...
0,sin(alpha2),cos(alpha2),d2;...
0,0,0,1];
A3=[cos(theta3),-sin(theta3)*cos(alpha3),sin(theta3)*sin(alpha3),a3*cos(theta3);...
sin(theta3),cos(theta3)*cos(alpha3),-cos(theta3)*sin(alpha3),a3*sin(theta3);...
0,sin(alpha3),cos(alpha3),d3;...
0,0,0,1];
alpha1=sym(0);
d1=sym(0);
a2=d;
alpha2=sym(0);
d2=sym(0);
theta2=sym(0);
alpha3=sym(0);
d3=sym(0);
theta3=-theta3;
T=eval_r(A1*A2*A3)
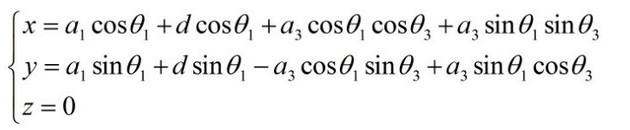
求得运动学正解为:
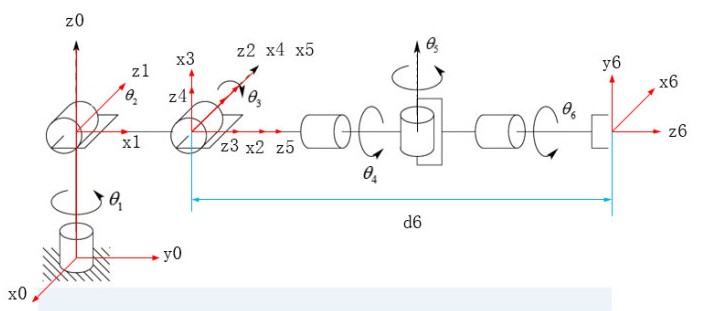
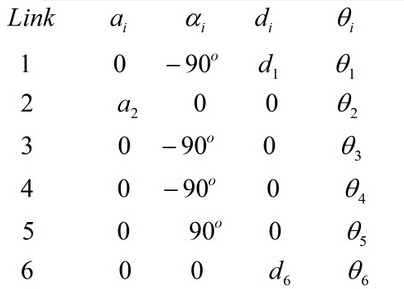
c、六自由度机器人
clear;
clc;
syms theta1 alpha1 a1 d1 theta2 alpha2 a2 d2 theta3 alpha3 a3 d3 ...
theta4 alpha4 a4 d4 theta5 alpha5 a5 d5 theta6 alpha6 a6 d6;
A1=[cos(theta1),-sin(theta1)*cos(alpha1),sin(theta1)*sin(alpha1),a1*cos(theta1);...
sin(theta1),cos(theta1)*cos(alpha1),-cos(theta1)*sin(alpha1),a1*sin(theta1);...
0,sin(alpha1),cos(alpha1),d1;...
0,0,0,1];
A2=[cos(theta2),-sin(theta2)*cos(alpha2),sin(theta2)*sin(alpha2),a2*cos(theta2);...
sin(theta2),cos(theta2)*cos(alpha2),-cos(theta2)*sin(alpha2),a2*sin(theta2);...
0,sin(alpha2),cos(alpha2),d2;...
0,0,0,1];
A3=[cos(theta3),-sin(theta3)*cos(alpha3),sin(theta3)*sin(alpha3),a3*cos(theta3);...
sin(theta3),cos(theta3)*cos(alpha3),-cos(theta3)*sin(alpha3),a3*sin(theta3);...
0,sin(alpha3),cos(alpha3),d3;...
0,0,0,1];
A4=[cos(theta4),-sin(theta4)*cos(alpha4),sin(theta4)*sin(alpha4),a4*cos(theta4);...
sin(theta4),cos(theta4)*cos(alpha4),-cos(theta4)*sin(alpha4),a4*sin(theta4);...
0,sin(alpha4),cos(alpha4),d4;...
0,0,0,1];
A5=[cos(theta5),-sin(theta5)*cos(alpha5),sin(theta5)*sin(alpha5),a5*cos(theta5);...
sin(theta5),cos(theta5)*cos(alpha5),-cos(theta5)*sin(alpha5),a5*sin(theta5);...
0,sin(alpha5),cos(alpha5),d5;...
0,0,0,1];
A6=[cos(theta6),-sin(theta6)*cos(alpha6),sin(theta6)*sin(alpha6),a6*cos(theta6);...
sin(theta6),cos(theta6)*cos(alpha6),-cos(theta6)*sin(alpha6),a6*sin(theta6);...
0,sin(alpha6),cos(alpha6),d6;...
0,0,0,1];
a1=sym(0);
alpha1=sym(-pi/2);
alpha2=sym(0);
d2=sym(0);
a3=sym(0);
alpha3=sym(-pi/2);
d3=sym(0);
a4=sym(0);
alpha4=sym(-pi/2);
d4=sym(0);
a5=sym(0);
alpha5=sym(pi/2);
d5=sym(0);
a6=sym(0);
alpha6=sym(0);
T=simplify(eval_r(A1*A2*A3*A4*A5*A6))

注:以上的eval_r为eval(不知道为什么,保存后“eval”就变成“eval_r”了)
from:http://blog.sina.com.cn/u/2707887295
运用DH参数法时坐标系建立的两个约定:
(1)x_i与z_(i-1)垂直
(2)x_i与z_(i-1)相交
坐标系i与坐标系i-1的其次变换矩阵为:
a为两z轴的距离,d为两x轴的距离。
alpha与theta的正方向约定为:
下面举三个例子:
a、平面二自由度机器人
clear;
clc;
syms theta1 alpha1 a1 d1 theta2 alpha2 a2 d2 a b theta d;
A1=[cos(theta1),-sin(theta1)*cos(alpha1),sin(theta1)*sin(alpha1),a1*cos(theta1);...
sin(theta1),cos(theta1)*cos(alpha1),-cos(theta1)*sin(alpha1),a1*sin(theta1);...
0,sin(alpha1),cos(alpha1),d1;...
0,0,0,1];
A2=[cos(theta2),-sin(theta2)*cos(alpha2),sin(theta2)*sin(alpha2),a2*cos(theta2);...
sin(theta2),cos(theta2)*cos(alpha2),-cos(theta2)*sin(alpha2),a2*sin(theta2);...
0,sin(alpha2),cos(alpha2),d2;...
0,0,0,1];
L=sqrt(a^2+b^2);
beta=atan(b/a);
a1=L;
alpha1=sym(0);
d1=sym(0);
theta1=theta;
a2=d;
alpha2=sym(0);
d2=sym(0);
theta2=-beta;
T=eval_r(A1*A2)
求得运动学正解为:
b、平面三自由度机器人
clear;
clc;
syms theta1 alpha1 a1 d1 theta2 alpha2 a2 d2 theta3 alpha3 a3 d3 d;
A1=[cos(theta1),-sin(theta1)*cos(alpha1),sin(theta1)*sin(alpha1),a1*cos(theta1);...
sin(theta1),cos(theta1)*cos(alpha1),-cos(theta1)*sin(alpha1),a1*sin(theta1);...
0,sin(alpha1),cos(alpha1),d1;...
0,0,0,1];
A2=[cos(theta2),-sin(theta2)*cos(alpha2),sin(theta2)*sin(alpha2),a2*cos(theta2);...
sin(theta2),cos(theta2)*cos(alpha2),-cos(theta2)*sin(alpha2),a2*sin(theta2);...
0,sin(alpha2),cos(alpha2),d2;...
0,0,0,1];
A3=[cos(theta3),-sin(theta3)*cos(alpha3),sin(theta3)*sin(alpha3),a3*cos(theta3);...
sin(theta3),cos(theta3)*cos(alpha3),-cos(theta3)*sin(alpha3),a3*sin(theta3);...
0,sin(alpha3),cos(alpha3),d3;...
0,0,0,1];
alpha1=sym(0);
d1=sym(0);
a2=d;
alpha2=sym(0);
d2=sym(0);
theta2=sym(0);
alpha3=sym(0);
d3=sym(0);
theta3=-theta3;
T=eval_r(A1*A2*A3)
求得运动学正解为:
c、六自由度机器人
clear;
clc;
syms theta1 alpha1 a1 d1 theta2 alpha2 a2 d2 theta3 alpha3 a3 d3 ...
theta4 alpha4 a4 d4 theta5 alpha5 a5 d5 theta6 alpha6 a6 d6;
A1=[cos(theta1),-sin(theta1)*cos(alpha1),sin(theta1)*sin(alpha1),a1*cos(theta1);...
sin(theta1),cos(theta1)*cos(alpha1),-cos(theta1)*sin(alpha1),a1*sin(theta1);...
0,sin(alpha1),cos(alpha1),d1;...
0,0,0,1];
A2=[cos(theta2),-sin(theta2)*cos(alpha2),sin(theta2)*sin(alpha2),a2*cos(theta2);...
sin(theta2),cos(theta2)*cos(alpha2),-cos(theta2)*sin(alpha2),a2*sin(theta2);...
0,sin(alpha2),cos(alpha2),d2;...
0,0,0,1];
A3=[cos(theta3),-sin(theta3)*cos(alpha3),sin(theta3)*sin(alpha3),a3*cos(theta3);...
sin(theta3),cos(theta3)*cos(alpha3),-cos(theta3)*sin(alpha3),a3*sin(theta3);...
0,sin(alpha3),cos(alpha3),d3;...
0,0,0,1];
A4=[cos(theta4),-sin(theta4)*cos(alpha4),sin(theta4)*sin(alpha4),a4*cos(theta4);...
sin(theta4),cos(theta4)*cos(alpha4),-cos(theta4)*sin(alpha4),a4*sin(theta4);...
0,sin(alpha4),cos(alpha4),d4;...
0,0,0,1];
A5=[cos(theta5),-sin(theta5)*cos(alpha5),sin(theta5)*sin(alpha5),a5*cos(theta5);...
sin(theta5),cos(theta5)*cos(alpha5),-cos(theta5)*sin(alpha5),a5*sin(theta5);...
0,sin(alpha5),cos(alpha5),d5;...
0,0,0,1];
A6=[cos(theta6),-sin(theta6)*cos(alpha6),sin(theta6)*sin(alpha6),a6*cos(theta6);...
sin(theta6),cos(theta6)*cos(alpha6),-cos(theta6)*sin(alpha6),a6*sin(theta6);...
0,sin(alpha6),cos(alpha6),d6;...
0,0,0,1];
a1=sym(0);
alpha1=sym(-pi/2);
alpha2=sym(0);
d2=sym(0);
a3=sym(0);
alpha3=sym(-pi/2);
d3=sym(0);
a4=sym(0);
alpha4=sym(-pi/2);
d4=sym(0);
a5=sym(0);
alpha5=sym(pi/2);
d5=sym(0);
a6=sym(0);
alpha6=sym(0);
T=simplify(eval_r(A1*A2*A3*A4*A5*A6))
注:以上的eval_r为eval(不知道为什么,保存后“eval”就变成“eval_r”了)
from:http://blog.sina.com.cn/u/2707887295

相关文章推荐
- js动态添加datagrid表头&批量保存实战研究
- 学会使用Git和远程代码库
- tomcat服务器详解
- .NET中STAThread和MTAThread
- 20150115--SHOP项目架构+后台权限管理-02
- Eigen之矩阵与向量的乘积
- 欢迎使用CSDN-markdown编辑器
- AOP的一些实现机制
- 数据挖掘:概念与技术 笔记
- 暑期实习笔试总结
- Java Web基础知识之Listener:监控Servlet的每个动作
- MySQL索引原理及慢查询优化
- 关于iOS远程推送的那些事
- Java 重写与重载区别 Java父类的Object方法 要重写tostring原因,多个catch处理逻辑
- ios app开发步骤
- Python Requests 学习笔记
- 欢迎使用CSDN-markdown编辑器
- Windows Communication Foundation (WCF) 概念概述
- OKIO源码分析
- solr-in-action-ch4-Configuring Solr