舵机控制器,蓝牙版,使用教程
2016-04-15 08:32
232 查看
要求:1,9V电池为控制器供电,4节1.5V电池为舵机供电;
2,PC要求XP32位系统;
第一步:PC安装BlueSoleil,打开控制器,此时蓝牙模块的红灯快速闪烁
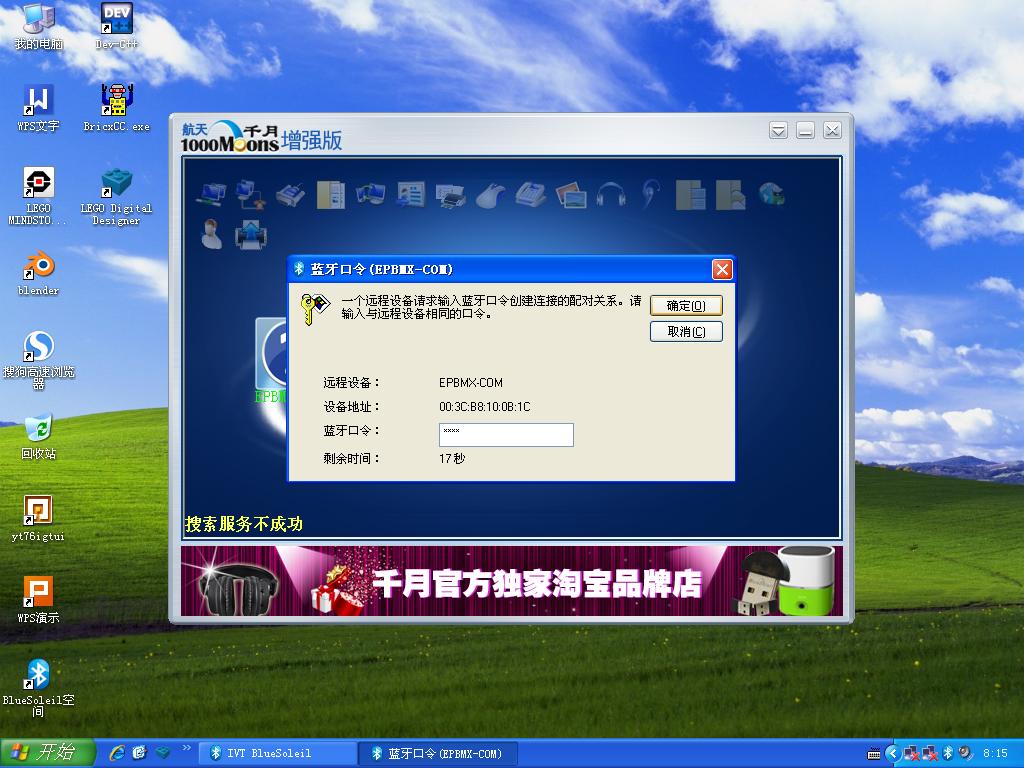
搜索并配对:0000,配对成功后,蓝牙模块不会出现连接成功的表现。

第二步:搜索服务,建立串口连接

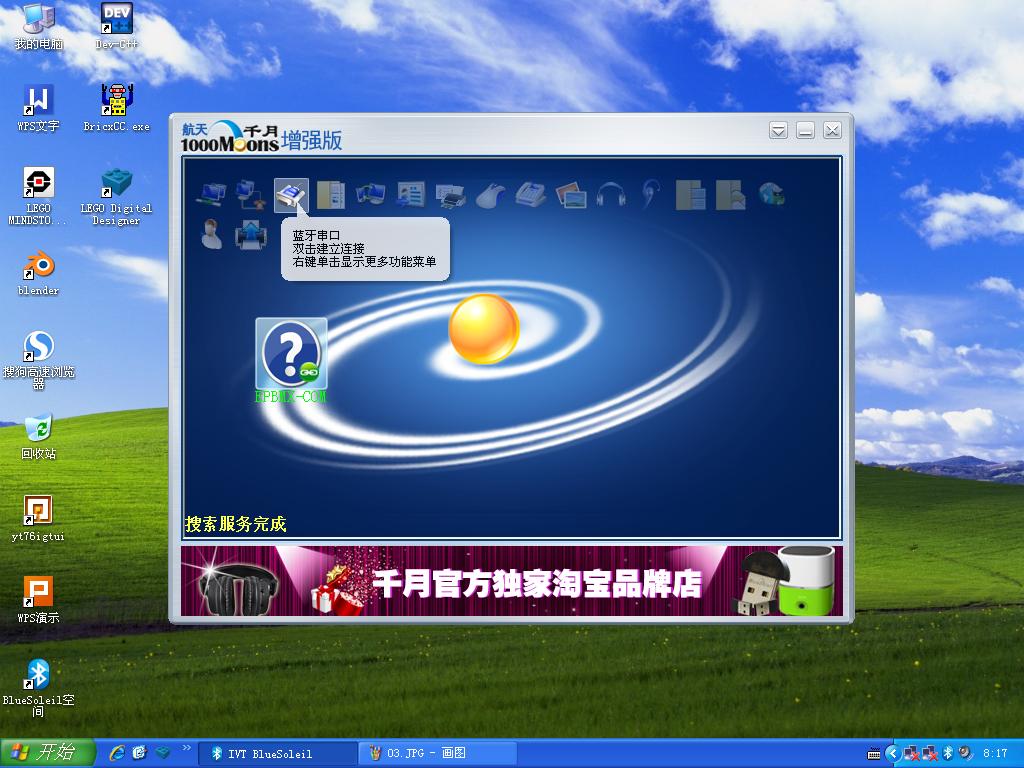
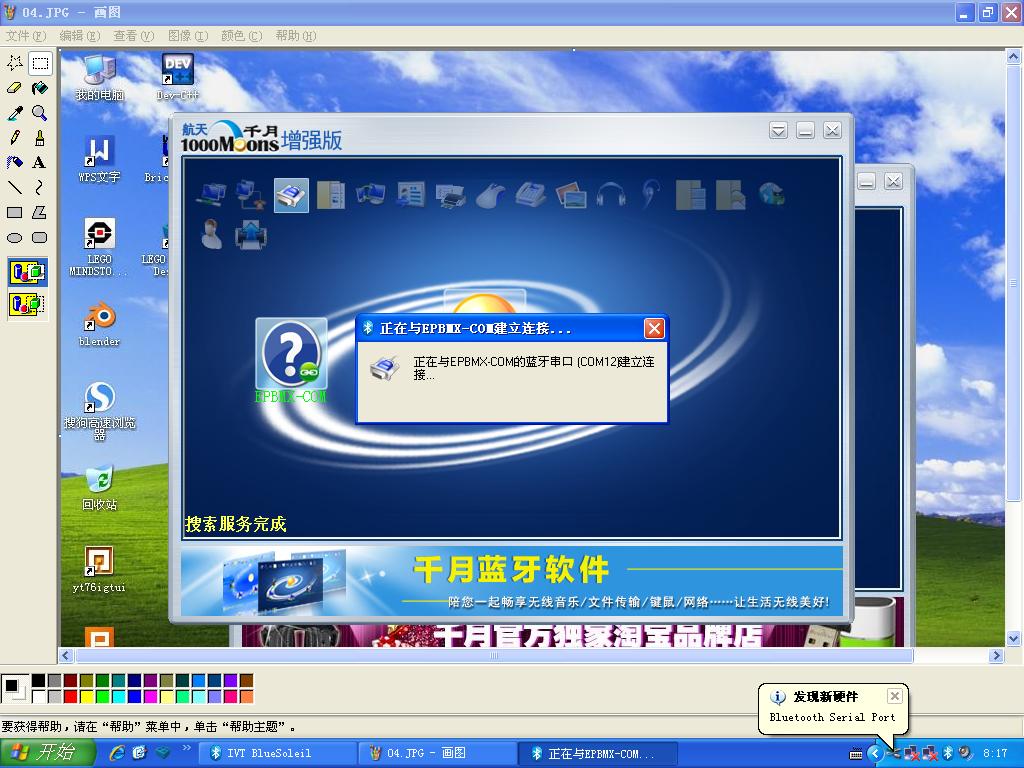
此时蓝牙模块亮绿灯,并且红灯慢速闪烁,表明已经建立串口连接
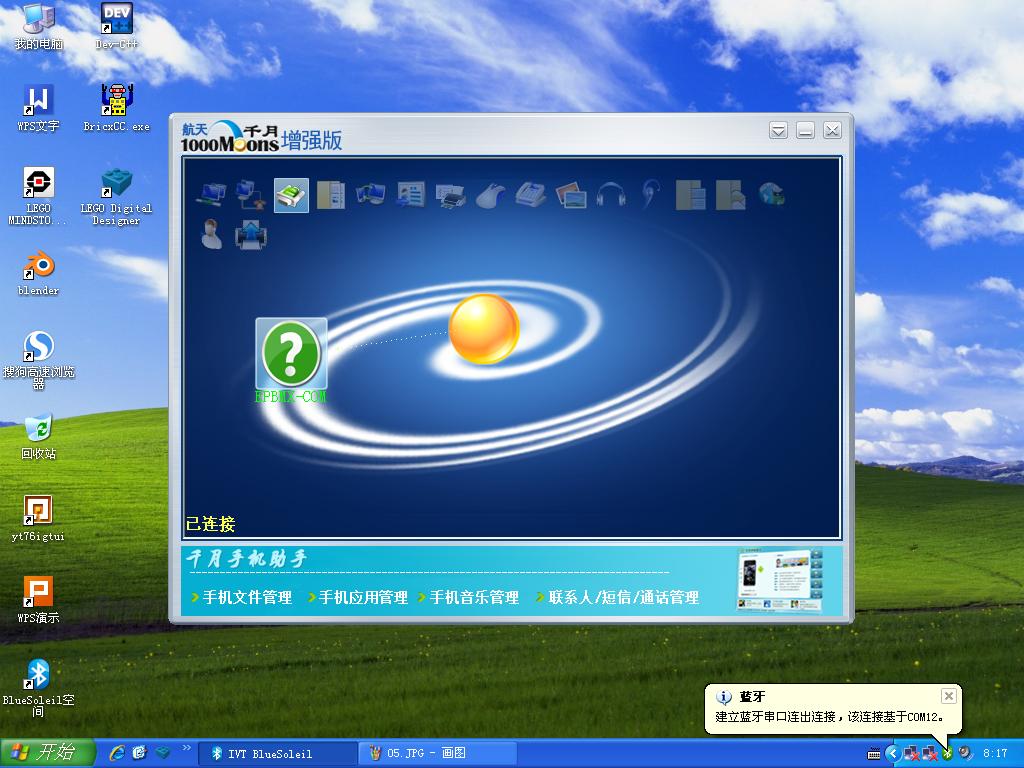
第三步:打开舵机控制器上位机软件,选择端口,串口只能使用115200波特率
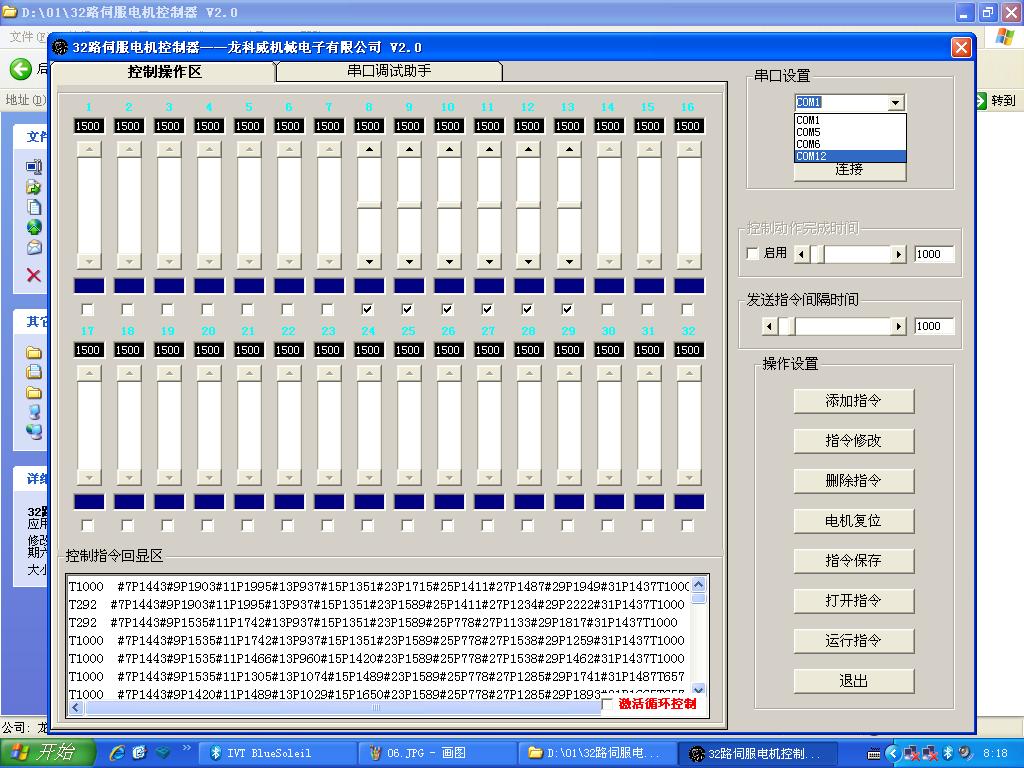
连接后既可以通过蓝牙控制舵机
2,PC要求XP32位系统;
第一步:PC安装BlueSoleil,打开控制器,此时蓝牙模块的红灯快速闪烁
搜索并配对:0000,配对成功后,蓝牙模块不会出现连接成功的表现。
第二步:搜索服务,建立串口连接
此时蓝牙模块亮绿灯,并且红灯慢速闪烁,表明已经建立串口连接
第三步:打开舵机控制器上位机软件,选择端口,串口只能使用115200波特率
连接后既可以通过蓝牙控制舵机

相关文章推荐
- 微信公众平台开发教程(四) 实例入门:机器人回复(附源码)
- asp.net(c#)捕捉搜索引擎蜘蛛和机器人
- 使用图灵api创建微信聊天机器人
- 安卓(Android)聊天机器人实现代码分享
- 什么是android(What Is Android?)
- 阿尔法狗3:0李世石!在机器人研发上,我国却还在做三十年前的来料加工
- 当机器人取代了你的工作,你该怎么办?
- Web 与移动 app 之后会是什么?
- 微软亚马逊发力,智能聊天机器人即将到来
- 三星i9158刷机教程
- Nagios调用短信接口
- http协议状态码详解
- 50年后人工智能将成为人类最大的威胁
- 实用工具类 GTalk机器人
- 如何处理计划中的网站关闭事件
- Web工程师的工具箱
- 美团网2014校招笔试题及解答(长沙站+哈尔滨站)
- [极客]硬件极客最爱:支持WiFi的Arduino板到来
- pcDuino上控制视频监控机器人
- 人形机器人----俯卧撑(参数)