引擎系列学习【二】图形渲染管线
2016-03-10 00:55
344 查看
计算机图形学早期对图像编程主要是通过D3D和OpenGL调节固定渲染流程中的特定参数,不能对GPU进行编程,这个流程即固定渲染管线,对应的编程模式也就是固定管线的编程。随着硬件性能的提升,为了得到更好的图像表现效果,可对GPU编程的模型也应运而生,对应的流程叫作可编程的渲染管线,对应的编程模式也就是可编程的图形渲染。对GPU编程的主要语言是NVIDIA公司开发的CG语言。
常见的Gpu的渲染管线的具体内容如下

注意这个图中的每个操作是有严格的先后顺序之分的。
在过去,在我们简单的使用opengl或者到到d3d进行图形绘制时,底层自动按照上述顺序为我们生成图形,我们在opengl中做的只是调节其中各个“参数”,但是数据走的通路是一样的,这称为固定渲染管线。
Gpu主要包括顶点处理器和片段处理器,在第三代显卡(GEforce3)之后,gpu的顶点处理器可以进行编程,也就是上图中的顶点变换部分可以被控制,在第四代显卡(GEForceFX)之后gpu的片段处理器可以进行编程,也就是插值 纹理采样 着色这一过程可以进行编程,现在我们可以自行调控上述两个红色部分的工作流程,而不必沿着固定渲染管线,这就叫做可编程的图形渲染。
当然cg语言也要依托于opengl和d3d这些图形硬件的借口,因为上图中的蓝色部分仍需他们来做,只是红色部分我们可以不再用opnegl来写和控制,另外诸如向硬件发送和接受数据也需要他们,cg语言的作用只是在opnegl中控制上述两个红色方块中的处理过程。
也就是我们可以直接掌控的顶点的属性有这三个:
1剪裁坐标系的位置:这个位置的值只有在-1在1之间才能被看见,也就是x为1的点恰好落在渲染窗口的最右边的线上,而剪裁坐标的z值就是深度值,可以直接控制这个坐标来控制图形的绘制于隐藏及其他集合变化等。
Projection Matrix*Modelview Matrix *局部坐标=剪裁坐标
2颜色就是每个顶点最终的着色
3纹理坐标通常就是我们去直接控制每个顶点的纹理坐标。但是更重要的是这里的纹理坐标通常不存储纹理,而是一个大的“缓存器”,它通常用来存储每个顶点的其他属性(如发向或其他任何想存储的和每个顶点有关的)然后传入给片段处理器进行处理。如我们要在片段处理器中每个顶点的法向进行差值做phone shading,这时就要先在顶点处理器中将法向装入一个纹理中传给片段程序。通常纹理的数量由opengl和硬件决定。
图形渲染管线的流程分为三个阶段:应用程序阶段、几何阶段、光栅化阶段。
阅读目录
1. 应用程序阶段(CPU)
1.1 视锥裁剪
1.2 场景图
1.3 四叉树与八叉树
2. 几何阶段(GPU)
2.1 坐标系统
局部坐标系
世界坐标系
观察坐标系
视口坐标系(屏幕坐标系)
2.2 图元装配
3. 光栅化阶段
3.1 背面剔除
3.2 alpha测试
3.3 模板测试
3.4 深度测试
3.5 alpha融合
正文
图形渲染管道被认为是实时图形渲染的核心,简称为管道。管道的主要功能是由给定的虚拟摄像机、三维物体、灯源、光照模型、纹理贴图或其他来产生或渲染一个二维图像。由此可见,渲染管线是实时渲染技术的底层工具。图像中物体的位置及形状是通过它们的几何描述、环境特征、以及该环境中虚拟摄像机的摆放位置来决定的。物体的外观受到了材质属性、灯源、贴图以及渲染模式(sharding
modles)的影响。
很多计算机图形学的书籍都把渲染管线分为三个阶段:应用程序阶段、几何阶段、光栅化阶段。
回到顶部
可见性判别:仅把可见(或至少潜在可见)的物体提交GPU,以免浪费宝贵的资源去渲染看不见的物体。(裁剪?)
提交几何图元至GPU以供渲染:像DirectX中的渲染调用接口DrawIndexedPrimitive(),该接口把子网格材质对传送至GPU进行下一步操作,类似的,在OpenGL中的接口glDrawArrays()也有相同功能。另一种提交方法是建立GPU命令表。场景如果需要多步骤渲染,则需要多次提交,所提交的几何图元应有适当地排序以优化性能。
控制着色器参数以及渲染状态。
很多经典的算法都是在这个阶段中进行的,诸如碰撞检测、场景图建立、空间八叉树更新、视锥裁剪等。

用几何术语来讲,上述的空间体积是一个平截头体。在平截头体剔除里,三维物体与平截头体有三种位置关系:
三维物体完全位于平截头体外。
三维物体部分位于平截头体内。
三维物体完全位于平截头体内。

对于第一种情况,物体会被排除在渲染表之外。给定一个网格模型,我们可以通过一些简单的判别测试来判断网格模型是否位于平截头体内,这些测试会用到物体的包围体积(包围物体的一个球体)及平截头体的六个平面。把平截头体六个平面同时往里缩进物体包围体积的半径长度,若球体中所有6个修改后的平面的前方,那么物体就是完全位于平截头体内部的(第三种情况),这种情况下三维物体将被保留并进入下一个阶段的处理。对于第二种情况,三维物体的三角形单元将被分为两个部分,位于视域体内部的将被保留,视域体外的哪部分将被剔除。
八叉树是四叉树的三维版本,每层递归细分都把八叉树空间划分为8个子区域,子区域通常中正方体或者长方体,不过也可以是任意三维区域。
回到顶部
matrix)。
另外,光照计算通常也是在世界坐标系中进行的,这是因为光照效果受到了物体之间关系的影响(如距离、是否遮挡、有无相互投影等)。当然,在观察坐标系中也可以得到相同的光照效果,因为中同一观察空间中物体之间的相对关系是保存不变的。有一点值得注意,顶点法向量中模型文件中属于局部坐标系描述,中GPU的顶点程序中必须将法向量转换到世界坐标系才能使用。这种转换同样是通过一个矩阵,这矩阵是上文所提的世界变化矩阵的逆矩阵。
近裁剪平面也即是梯形体较小的矩形面,在Directx中,为了简化绘制工作,通常将近裁剪平面和投影平面合二为一。在观察者坐标系中,我们的任务是获取3D场景的2D表示,这种从N维到N-1维的操作在数学上称为投影,实现投影有多种方式,如正投影(也称平行投影)和透视投影。由于透视投影更加符合人类的视觉习惯,它会产生近大远小的效果,所以我们采用这种投影来执行视锥中的3维数据到投影平面的投影。Directx中通过一个称为投影矩阵来将视域体中的几何体投影到投影窗口中。
经过一系列坐标的转换,我们输入计算机的一系列三维坐标点已经转换为2D屏幕的三维显示数据。
这里提到了视口裁剪,实际上裁剪是个很大的概念,裁剪包括了视域裁剪(应用程序阶段)、视口裁剪、背面剔除、遮挡剔除(光栅化阶段)。背面剔除涉及到三角形的顶点绕序问题。每个多边形都有两个侧面,我们将其中一个标记为正面,另一个侧面标记为背面,通常,多边形的背面是不可见的,通过背面剔除操作可以不对物体的背面进行渲染,减少需要绘制的顶点个数。一般来说我们根据右手定则来决定三角形的法向量,如果法向量朝向视点(三角形顶点顺时针绕序)即为正面,反之为背面。在Directx3D中,默认顶点排列顺序为顺时针的三角形单元是正面朝向。但也可以通过SetRenderState方法来修改剔除方式。
回到顶部
alpha测试指的是将一个像素点的alpha值和一个固定值比较。如果比较的结果失败,像素将不会被写到显示输出中。
模板缓存与深度测试缓存、后台缓存(或颜色缓存,最终显示在屏幕上的缓冲区)的大小(分辨率)完全一致,模板缓存中的像素点与后台缓存的像素点是一
一对应的。模板缓存允许我们动态地、有针对性地决定是否将某个像素写入后台缓存中。模板缓存用与获得某种特效,如镜面效果或阴影效果。在实现镜面效果时,我们在“镜子”这块区域中绘制某个特定物体的映像,而使用模板缓存来阻止物体映像在“非镜子”的区域中进行绘制。
为了进行这种阻止,就需要使用模板测试。判断是否将某个像素写入后台缓存的决策过程,称为模板测试。
3.5 alpha融合
融合技术能使我们将当前要进行的光栅化的像素的颜色与先前已经光栅化并处于同一位置的像素的颜色进行合成,即将正在处理的图元颜色值与存储中后台缓存中的像素颜色值进行合成。利用该技术,我们可以获得各种各样的效果,尤其是透明效果。不过值得注意的是,为了中场景中绘制透明物体,通常需要对物体按照由后到前的顺序进行混合处理,如果按照任意顺序进行处理将会产生严重的失真。所以在blending(混色)操作之前要来一次Depth
test(见下图)。
3.6 抖动处理
在低位深度的图象中,由于颜色总数的限制,有些颜色无法显示出来,为了模拟出那些颜色以提高显示效果,广泛采用了一种称作抖动处理(dithering)的方法,也称半色调处理(Halftoning)。它是指用交替的点图案去模拟在图象中不能使用的颜色的过程。单色图象是最简单的格式,一般由黑色和白色组成,在一些单色图象如黑白照片和有深浅的图案中,会使用各种灰度,这种图象常被称为灰度图象(Grayscale
Image)。由于人眼会把一个很细致的黑白相间的图案解释成灰色,所以灰度图象也可使用单色文件格式,数据仍然可以是黑和白。使用黑色或某一种单色的点获得连续的该色灰度的过程就是抖动处理。抖动处理被更多的用在那些低位数彩色图象文件中,与不采用这种处理相比,它具有更好的显示效果。
经历了这阶段之后,像素的颜色值被写入帧缓存中。
以上内容即为渲染管道的整个流程。
1图形渲染管线
现代计算机处理图形主要依靠图形处理单元(GPU)来完成,在GPU上渲染图形的整个过程就是图形渲染管线,整个管线的输入是最初的描述图元的数据,输出是屏幕上每个像素的颜色,一切图形学的处理过程都在这个管线中进行。常见的Gpu的渲染管线的具体内容如下
注意这个图中的每个操作是有严格的先后顺序之分的。
在过去,在我们简单的使用opengl或者到到d3d进行图形绘制时,底层自动按照上述顺序为我们生成图形,我们在opengl中做的只是调节其中各个“参数”,但是数据走的通路是一样的,这称为固定渲染管线。
Gpu主要包括顶点处理器和片段处理器,在第三代显卡(GEforce3)之后,gpu的顶点处理器可以进行编程,也就是上图中的顶点变换部分可以被控制,在第四代显卡(GEForceFX)之后gpu的片段处理器可以进行编程,也就是插值 纹理采样 着色这一过程可以进行编程,现在我们可以自行调控上述两个红色部分的工作流程,而不必沿着固定渲染管线,这就叫做可编程的图形渲染。
当然cg语言也要依托于opengl和d3d这些图形硬件的借口,因为上图中的蓝色部分仍需他们来做,只是红色部分我们可以不再用opnegl来写和控制,另外诸如向硬件发送和接受数据也需要他们,cg语言的作用只是在opnegl中控制上述两个红色方块中的处理过程。
2顶点程序
在顶点处理器中执行的程序叫做顶点程序,顶点程序的作用也就是进行顶点变化,在图形渲染管线中,它可以做三件事,一是将输入的物体的局部坐标转化成最终的剪裁坐标,二是生成每个顶点的纹理坐标,三是产生每个顶点的颜色。所以在一个顶点程序中,允许的输入有位置信息(这个位置是局部坐标),顶点颜色(在opengl中绘制顶点时指定的),法向信息,n个纹理坐标(在opengl中指定的),输出通常有位置、颜色、n个纹理坐标,不输出的有默认值。也就是我们可以直接掌控的顶点的属性有这三个:
1剪裁坐标系的位置:这个位置的值只有在-1在1之间才能被看见,也就是x为1的点恰好落在渲染窗口的最右边的线上,而剪裁坐标的z值就是深度值,可以直接控制这个坐标来控制图形的绘制于隐藏及其他集合变化等。
Projection Matrix*Modelview Matrix *局部坐标=剪裁坐标
2颜色就是每个顶点最终的着色
3纹理坐标通常就是我们去直接控制每个顶点的纹理坐标。但是更重要的是这里的纹理坐标通常不存储纹理,而是一个大的“缓存器”,它通常用来存储每个顶点的其他属性(如发向或其他任何想存储的和每个顶点有关的)然后传入给片段处理器进行处理。如我们要在片段处理器中每个顶点的法向进行差值做phone shading,这时就要先在顶点处理器中将法向装入一个纹理中传给片段程序。通常纹理的数量由opengl和硬件决定。
3片段程序
在片段处理器中执行的程序称作片段程序,片段程序的作用其实说到底只有一个,就是为已经光栅化的每一个片段产生它的颜色。对于片段程序,它的输入只有纹理信息,输出也只有颜色信息。当然输入的纹理信息可以封装其他的可以被光栅化的信息(如位置、法向等),我们可以根据不同的需要和纹理采样来直接控制每个片段的最终颜色。图形渲染管线的流程分为三个阶段:应用程序阶段、几何阶段、光栅化阶段。
浅谈 GPU图形固定渲染管线
阅读目录1. 应用程序阶段(CPU)
1.1 视锥裁剪
1.2 场景图
1.3 四叉树与八叉树
2. 几何阶段(GPU)
2.1 坐标系统
局部坐标系
世界坐标系
观察坐标系
视口坐标系(屏幕坐标系)
2.2 图元装配
3. 光栅化阶段
3.1 背面剔除
3.2 alpha测试
3.3 模板测试
3.4 深度测试
3.5 alpha融合
正文
图形渲染管道被认为是实时图形渲染的核心,简称为管道。管道的主要功能是由给定的虚拟摄像机、三维物体、灯源、光照模型、纹理贴图或其他来产生或渲染一个二维图像。由此可见,渲染管线是实时渲染技术的底层工具。图像中物体的位置及形状是通过它们的几何描述、环境特征、以及该环境中虚拟摄像机的摆放位置来决定的。物体的外观受到了材质属性、灯源、贴图以及渲染模式(sharding
modles)的影响。
很多计算机图形学的书籍都把渲染管线分为三个阶段:应用程序阶段、几何阶段、光栅化阶段。
回到顶部
1. 应用程序阶段(CPU)
应用程序阶段,通过高级编程语言(C、C++、JAVA)进行开发,与CPU、内存打交道,主要任务是识别出潜在可视的网格实例,并把它们及其材质呈交给图形硬件以供渲染。在该阶段的末端将产生几何体数据,包括顶点坐标、法向量、纹理坐标、纹理等,通过数据总线传送到图形硬件以供渲染(时间瓶颈),进行几何阶段。应用程序阶段负责驱动GPU管道,在该阶段有三个角色:可见性判别:仅把可见(或至少潜在可见)的物体提交GPU,以免浪费宝贵的资源去渲染看不见的物体。(裁剪?)
提交几何图元至GPU以供渲染:像DirectX中的渲染调用接口DrawIndexedPrimitive(),该接口把子网格材质对传送至GPU进行下一步操作,类似的,在OpenGL中的接口glDrawArrays()也有相同功能。另一种提交方法是建立GPU命令表。场景如果需要多步骤渲染,则需要多次提交,所提交的几何图元应有适当地排序以优化性能。
控制着色器参数以及渲染状态。
很多经典的算法都是在这个阶段中进行的,诸如碰撞检测、场景图建立、空间八叉树更新、视锥裁剪等。
1.1 视锥裁剪
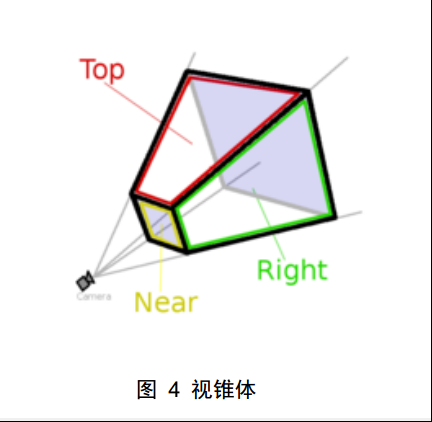
视锥裁剪算法是在应用程序阶段执行的。在把场景中的物体提交给GPU进行下一阶段操作之前,需要把对最后影像没有任何贡献的物体裁剪掉,仅仅把可见的网格数据传送给GPU。这个建立可见网格实例表的过程即为可见性判断。锥体由虚拟摄像机来定义。虚拟摄像机制定了场景对观察者可见的部分,即我们将依据哪部分3D场景来创建2D图像。在世界坐标系中,摄像机有一定的位置和方向属性,定义了可见的空间体积即视锥体。下图展示一个虚拟摄像机的模型:用几何术语来讲,上述的空间体积是一个平截头体。在平截头体剔除里,三维物体与平截头体有三种位置关系:
三维物体完全位于平截头体外。
三维物体部分位于平截头体内。
三维物体完全位于平截头体内。
对于第一种情况,物体会被排除在渲染表之外。给定一个网格模型,我们可以通过一些简单的判别测试来判断网格模型是否位于平截头体内,这些测试会用到物体的包围体积(包围物体的一个球体)及平截头体的六个平面。把平截头体六个平面同时往里缩进物体包围体积的半径长度,若球体中所有6个修改后的平面的前方,那么物体就是完全位于平截头体内部的(第三种情况),这种情况下三维物体将被保留并进入下一个阶段的处理。对于第二种情况,三维物体的三角形单元将被分为两个部分,位于视域体内部的将被保留,视域体外的哪部分将被剔除。
1.2 场景图
现在的游戏世界能够达到很大的规模,在多数场景中,大部分的几何物体处于上文所说的平截头体之外,如果这些物体的剔除皆使用平截头体,会造成难以想象的时间资源消耗。因此我们希望能够设计一种数据结构来解决大场景的裁剪问题,它能够迅速丢弃大量完全不接近摄像机平截头体的场景部分,这样才能进行更加仔细的平截头体剔除,此数据结构更可以帮助对场景中的几何物体排序。这种数据结构就是场景图。场景图不一定是图,更多可能是某种树:四叉树、八叉树、BSP树、kd树等等。它们的理念在于把三维空间以某种形式划分为区域,使不与平截头体相交的区域尽快丢弃,而无须逐一物体进行平截头体剔除。1.3 四叉树与八叉树
四叉树使用递归的方式把空间划分成象限,因此四叉树每个节点都有四个孩子节点。象限的划分通常是由轴对称的平面切割而成,所以每个象限是正方形或长方形的,不过也有一些四叉树用任意形状来细分空间。四叉树这种数据结构出现的目的就是加速平截头体的裁剪,那么它是如何办到的呢?我们从根节点往叶子节点遍历,如果某个节点区域若位于平截头体外,则该节点的四个孩子节点区域也是位于平截头体外,所以我们可以停止遍历该分支。八叉树是四叉树的三维版本,每层递归细分都把八叉树空间划分为8个子区域,子区域通常中正方体或者长方体,不过也可以是任意三维区域。
回到顶部
2. 几何阶段(GPU)
几何阶段主要负责顶点坐标变换、光照、裁剪、投影以及屏幕映射,该阶段基于GPU进行计算,该阶段的末尾得到经过变换和投影之后的顶点坐标、颜色、 以及纹理坐标。其主要工作可以概括为“变换三维顶点坐标”和“光照计算”。我们的显卡信息中通常会有一个标示为“T&L”的硬件部分,T即是Transform,L即是Lighting。那么三维顶点坐标为什么需要变换?如何变换?要知道,我们出入到计算机中的是一系列三维坐标点,但我们最终看到的从视点出发观察到的特定点。我们电脑显示器是二维的,GPU所需要做的,就是把三维顶点数据经过转换绘制到二维屏幕上,并让二维画面看起来有3D效果。顶点的变换涉及一系列的坐标系统,顶点变换过程,就是通过各个变化矩阵,把一个坐标系统下的顶点信息,变化到另外一个坐标系统上,从而实现3D的顶点数据最终可以在2D屏幕上进行显示。我们来了解一下变换过程中的各个坐标系统。2.1 坐标系统
根据顶点坐标变换的顺序,主要有如下几个坐标空间:局部坐标系(或称自身坐标系、建模坐标系)、世界坐标系、观察坐标系、视口坐标系(屏幕坐标系)。局部坐标系
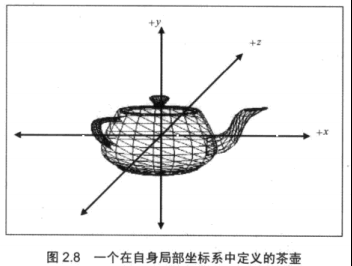
局部坐标系用于定义构成物体的三角形单元列表的坐标,它描述的是模型文件本身的顶点与顶点值之间的关系,顶点值是在模型建模时得到的。局部坐标系与场景中的其他物体没有任何的参照关系,这也是局部坐标系与世界坐标系区分的关键。世界坐标系
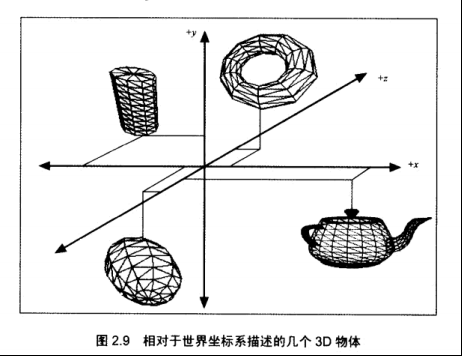
构建各种模型时,每个模型都位于其自身的局部坐标系中,而无论在现实世界还是在计算机的虚拟空间中,物体都必须和一个固定的坐标原点进行参照才能够确定自己所在的位置,这是世界坐标系的实际意义所在。位于局部坐标系中的物体通过一个称为世界变换的运算过程变换到世界坐标系中,该变换通常包括平移、旋转、以及比例运算,分别用于设定该物体在世界坐标系中的位置、方向及模型的大小。这变换过程由一个四阶矩阵控制,通常称为世界矩阵(worldmatrix)。
另外,光照计算通常也是在世界坐标系中进行的,这是因为光照效果受到了物体之间关系的影响(如距离、是否遮挡、有无相互投影等)。当然,在观察坐标系中也可以得到相同的光照效果,因为中同一观察空间中物体之间的相对关系是保存不变的。有一点值得注意,顶点法向量中模型文件中属于局部坐标系描述,中GPU的顶点程序中必须将法向量转换到世界坐标系才能使用。这种转换同样是通过一个矩阵,这矩阵是上文所提的世界变化矩阵的逆矩阵。
观察坐标系
在现实世界中,每个人都是通过自己的眼睛来观察世界,同样的,在虚拟世界中,虚拟摄像机就是我们的“眼睛”,计算机每次只能从唯一的视角出发来渲染物体。例如当我们玩CS游戏时,屏幕显示的内容随着视点的变化而变化,这是因为GPU将物体的坐标从世界坐标系变换到了观察坐标系。实际上所谓的观察坐标系,也就是我们在上文中提到的摄像机的视锥体,它以摄像机为原点,由摄像机观察方向、视角、远近裁剪平面,共同构成一个梯形体的三维空间:近裁剪平面也即是梯形体较小的矩形面,在Directx中,为了简化绘制工作,通常将近裁剪平面和投影平面合二为一。在观察者坐标系中,我们的任务是获取3D场景的2D表示,这种从N维到N-1维的操作在数学上称为投影,实现投影有多种方式,如正投影(也称平行投影)和透视投影。由于透视投影更加符合人类的视觉习惯,它会产生近大远小的效果,所以我们采用这种投影来执行视锥中的3维数据到投影平面的投影。Directx中通过一个称为投影矩阵来将视域体中的几何体投影到投影窗口中。
视口坐标系(屏幕坐标系)
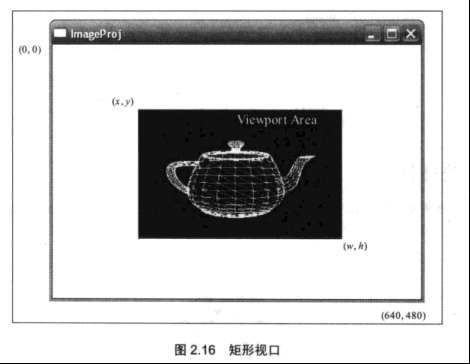
从视点坐标系到视口坐标系的转换是通过视口变换操作来进行的。视口变换的任务是将顶点坐标从投影平面转换到屏幕的一个矩形区域中,该区域称为视口。在游戏中,视口通常是整个矩形屏幕区域,当然也可以将视口描述为屏幕的一个子区域,视口的坐标是相对于窗口来描述的经过一系列坐标的转换,我们输入计算机的一系列三维坐标点已经转换为2D屏幕的三维显示数据。
2.2 图元装配
几何阶段处理结束后,送到光栅化阶段的是一堆三角形面片,所以中几何阶段中需要对顶点进行图元装配。所谓的图元装配,即根据顶点原始的连接关系,还原出模型的网格结构。网格由顶点和索引组成,在之前的流水线中是对顶点的处理,而在这阶段是根据索引将顶点连接中一起,组成线、面单元。然后对超出视口外的三角形进行裁剪(视口裁剪),如果有一个三角形其中一个顶点位于画面外,另外两个顶点位于画面内,我们看到的将是一个四边形,而这个四边形又被划分为两个小的三角形。这里提到了视口裁剪,实际上裁剪是个很大的概念,裁剪包括了视域裁剪(应用程序阶段)、视口裁剪、背面剔除、遮挡剔除(光栅化阶段)。背面剔除涉及到三角形的顶点绕序问题。每个多边形都有两个侧面,我们将其中一个标记为正面,另一个侧面标记为背面,通常,多边形的背面是不可见的,通过背面剔除操作可以不对物体的背面进行渲染,减少需要绘制的顶点个数。一般来说我们根据右手定则来决定三角形的法向量,如果法向量朝向视点(三角形顶点顺时针绕序)即为正面,反之为背面。在Directx3D中,默认顶点排列顺序为顺时针的三角形单元是正面朝向。但也可以通过SetRenderState方法来修改剔除方式。
回到顶部
3. 光栅化阶段
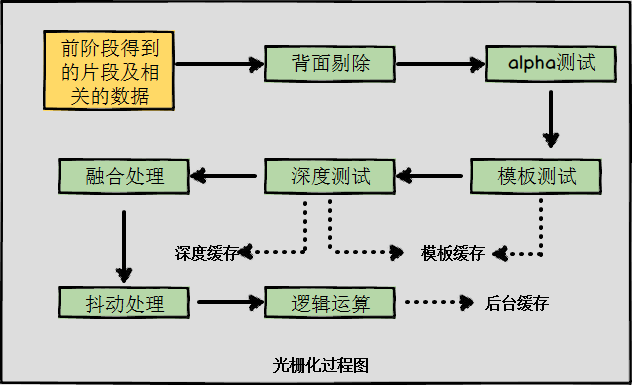
管道的最终阶段为合并阶段或混合阶段,NVIDIA称之为光栅运算阶段,光栅化的目的是计算出每个像素的颜色值。这个阶段把几何阶段送过来的三角形转化为片段,并对片段进行着色。片段经过裁剪测试、alpha测试、模板测试、深度测试、融合等处理后,最终和帧缓冲混合。光栅化过程大致如下图所示:3.1 背面剔除
对于实时交互的图形应用程序而言,图形渲染速度和效率是非常重要的。渲染的时候应该尽量减少不必要的操作。剔除是一种通过避免渲染背对观察者的几何体面来提高性能的优化措施。所有几何体都包含正面和反面。剔除基于大多数对象都是封闭的事实;如果你有一个立方体,你不会看到背离你的那一面(总是只有一面在你的前方),因此我们不需要绘制出背面。因此也被称做背面剔除。3.2 alpha测试
纹理的颜色中含有alpha分量,alpha分量主要用于指定像素的透明度。假定我们为每个像素的alpha分量保留了8位,则该alpha分量的合法区间是[0,255],其中,[0,255]对应透明度[0%,100%]。当像素的alpha值为0时,该像素是完全透明的。如果像素的alpha值为128,其透明度就是50%,而alpha值为255则表示完全不透明。alpha测试指的是将一个像素点的alpha值和一个固定值比较。如果比较的结果失败,像素将不会被写到显示输出中。
3.3 模板测试
在说明模板测试之前,我们需要先介绍一下模板缓存。模板缓存与深度测试缓存、后台缓存(或颜色缓存,最终显示在屏幕上的缓冲区)的大小(分辨率)完全一致,模板缓存中的像素点与后台缓存的像素点是一
一对应的。模板缓存允许我们动态地、有针对性地决定是否将某个像素写入后台缓存中。模板缓存用与获得某种特效,如镜面效果或阴影效果。在实现镜面效果时,我们在“镜子”这块区域中绘制某个特定物体的映像,而使用模板缓存来阻止物体映像在“非镜子”的区域中进行绘制。
为了进行这种阻止,就需要使用模板测试。判断是否将某个像素写入后台缓存的决策过程,称为模板测试。
3.4 深度测试
当两个物体有前后位置关系时,位于前面的物体会将后面的物体部分或全部遮挡。这时为了优化考虑,GPU不应该绘制被遮挡的片段,这种行为称为遮挡剔除。为了更好了解遮挡剔除与深度测试,我们先来看看深度缓存。深度缓存是一个只含有特定像素的深度信息而不含图像数据的表面。深度缓存为最终绘制图像中的每一个像素都保留了一个深度项。所以,当所绘制的图形的分辨率为640*480时,深度缓存中将有640*480个深度项。深度缓存用于计算每个像素的深度值并进行深度测试,深度测试的基本内容是依据深度值让处于同一位置的不同像素进行竞争,以选出该写入该位置的像素,距离摄像机最近的像素获胜,并被写入深入缓存的对应位置上。这样做是合理的,因为距离摄像机最近的像素一定会将位于其后方的像素遮挡。3.5 alpha融合
融合技术能使我们将当前要进行的光栅化的像素的颜色与先前已经光栅化并处于同一位置的像素的颜色进行合成,即将正在处理的图元颜色值与存储中后台缓存中的像素颜色值进行合成。利用该技术,我们可以获得各种各样的效果,尤其是透明效果。不过值得注意的是,为了中场景中绘制透明物体,通常需要对物体按照由后到前的顺序进行混合处理,如果按照任意顺序进行处理将会产生严重的失真。所以在blending(混色)操作之前要来一次Depthtest(见下图)。
3.6 抖动处理
在低位深度的图象中,由于颜色总数的限制,有些颜色无法显示出来,为了模拟出那些颜色以提高显示效果,广泛采用了一种称作抖动处理(dithering)的方法,也称半色调处理(Halftoning)。它是指用交替的点图案去模拟在图象中不能使用的颜色的过程。单色图象是最简单的格式,一般由黑色和白色组成,在一些单色图象如黑白照片和有深浅的图案中,会使用各种灰度,这种图象常被称为灰度图象(Grayscale
Image)。由于人眼会把一个很细致的黑白相间的图案解释成灰色,所以灰度图象也可使用单色文件格式,数据仍然可以是黑和白。使用黑色或某一种单色的点获得连续的该色灰度的过程就是抖动处理。抖动处理被更多的用在那些低位数彩色图象文件中,与不采用这种处理相比,它具有更好的显示效果。
经历了这阶段之后,像素的颜色值被写入帧缓存中。
以上内容即为渲染管道的整个流程。

相关文章推荐
- Http头介绍:Expires,Cache-Control,Last-Modified,ETag
- 204. Count Primes
- 第三题:等式变换 输入一个正整数X,在下面的等式左边的数字之间添加+号或者-号,使得等式成立。 1 2 3 4 5 6 7 8 9 = X
- Java并发
- 欢迎使用CSDN-markdown编辑器
- 【android】IntentService
- UVa 10655 Contemplation! Algebra 矩阵快速幂
- java 类型转换
- Gstreamer框架中使用gst-launch进行流媒体播放
- linker command failed with exit code 1 (use -v to see invocation),经典Xcode编译错误的出现和解决!
- ftell、fread、fseek、feof 详细的使用介绍与注意细节
- 看看异常
- 产品级敏捷培训体验
- Gstreamer中一些gst-launch常用命令
- 了解CSS
- 从EditText设置setError不能显示提示文本说说Html的fromHtml用法
- 文件管理者NSFileManager && 写入文件存储 &&字符串操作 && NSInputStream
- iOS使用的一些库 原理分析
- PHP二维码生成的方法(google APi,PHP类库,libqrencode等)
- #多线程编程(一)