Beaglebone Black–GPIO 高低电平控制 LED 灯
2016-01-23 01:05
441 查看
上一篇,运用 Linux 的 sysfs,控制本机上的 LED 灯,usr0 至 usr3,这次用 GPIO 控制外部的电路,点亮 LED 灯。
这次的全部材料:
BBB 一台
购买 BBB 自带的 USB 数据线
面包板一块
470Ω 三枚(至少一枚)
白、红、黄、绿 LED 灯各一个(至少一个)
公对公杜邦线 4 条(至少两条)
面包板供电模块 3.3v (可选)
纸卡一张(可选)
万用表(可选)
面包板装上电源模块,注意正负极,红线正极,搞反了面包板红色和蓝色反过来的话,就考验你记忆力了。
供电模块如果能调电压,就调到 3.3V,然后接线。如果不知道面包板线路方向的话,这样的:
我不记得电阻上面的色环代表多少的,而且淘宝货,用万用表检查一下:

不会用万用表的话请自行百度。
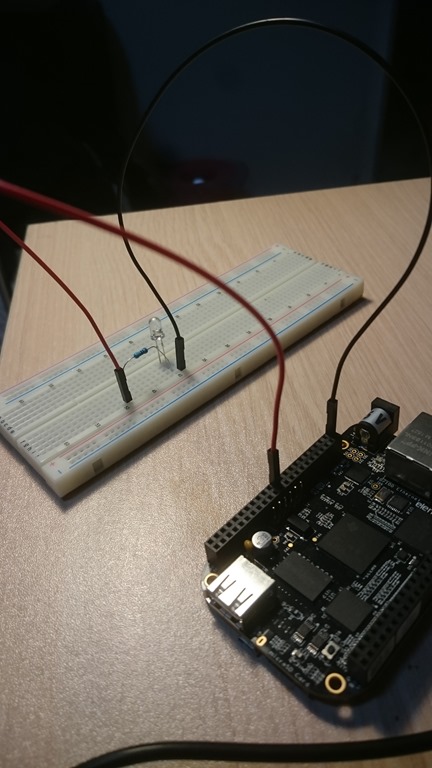
LED 灯长脚是正极,两条杜邦线分别接正负极,中间是 470欧电阻,小心元件的金属脚不要互相碰到即可。连接后如下图:

上电,亮了,这不应该会搞错吧:

比较暗请无视。用 470欧 是因为,欧姆定律 + 官方说明, BBB GPIO 顶多给 5mA 电流,拉多了发生了什么事的话,后果自负。
几个 mA 我还以为不亮了…。继续,插进去 BBB。
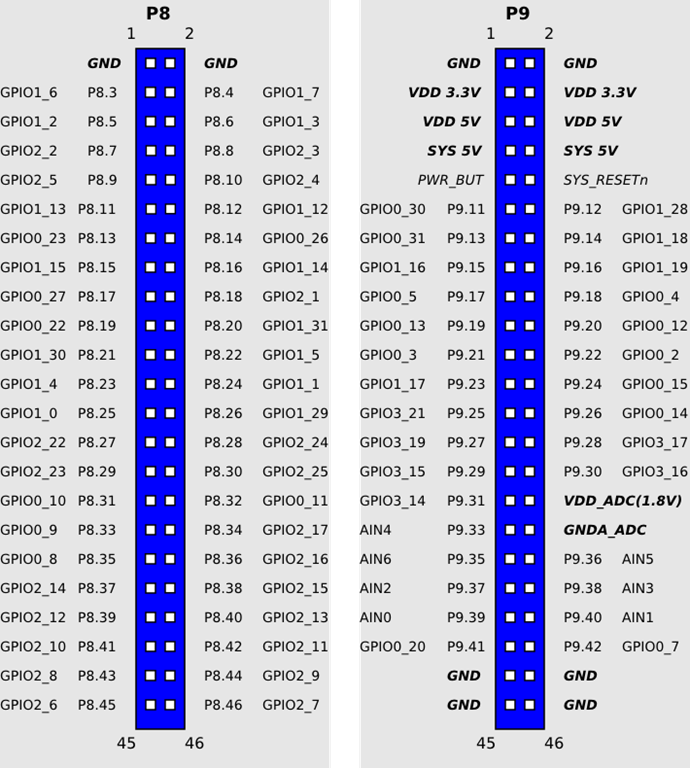
首先要知道引脚功能:

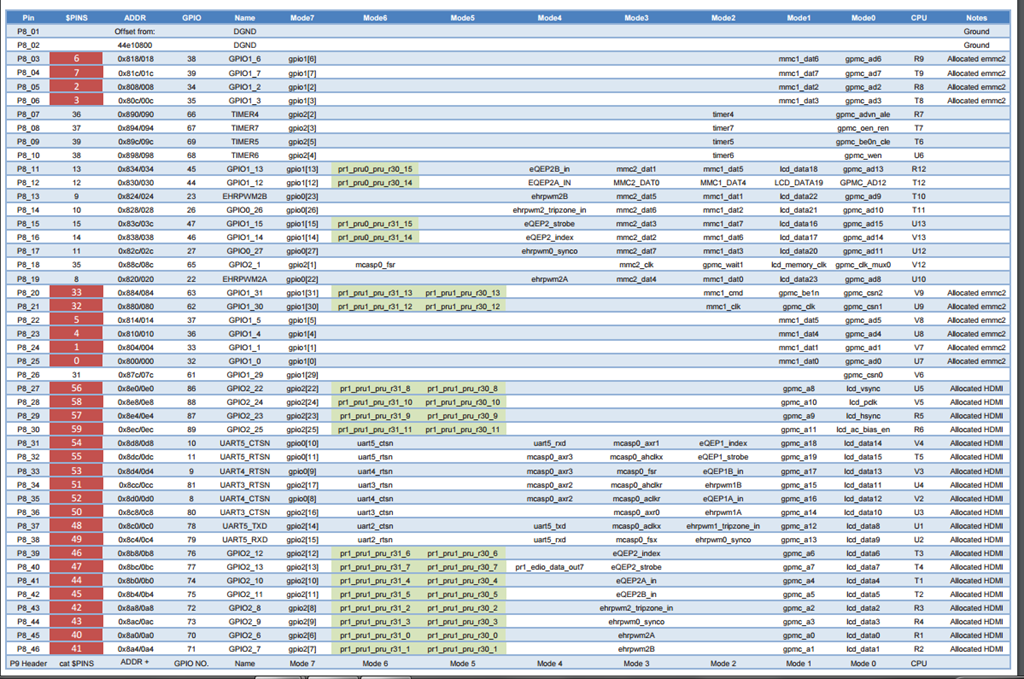
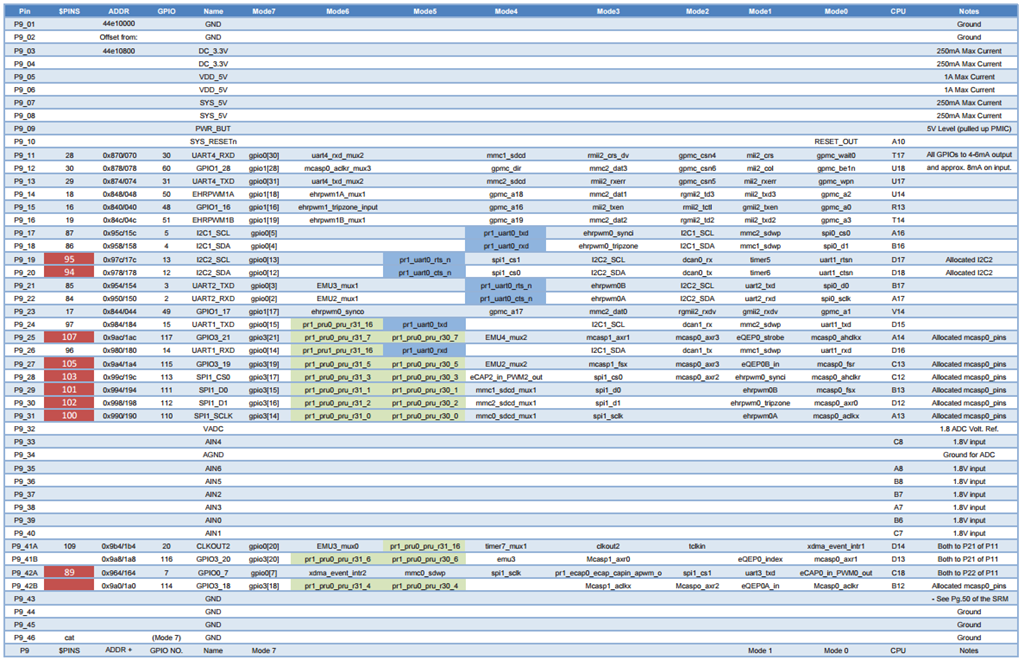
个引脚详细说明,默认功能,系统是否已占用等等,P8 高清版请看这里,P9 高清版请看这里。打不开请自行FQ。


最左侧 PIN 是 pin 名,把 BBB 摆正V5电源和网线插头在上方的话,右排就是 P8,左排 P9,每排左上角是一号脚,右上角是二号脚,如此类推。详细说明请自己看说明书。
红色底色代表默认被占用。比如 HDMI, eMMC。它是通过 cape manager 来管理,调用引脚的。题外话,我见过有人为了这个把 cape manager 卸载掉… 。开机档可以禁用该 cape 的,到我需要时候再试试看吧。
上图 mode 0 至 7 可以调的,后话。现在只需要关心是有否被占用,实际是哪个引脚要插线,还有它的 GPIO 号是多少(第四栏)。
现在把面包板的电源模块拔掉,BBB 关机情况下,把原来的负极接 BBB 的 P9_1 GND,正极接 P9_23 :

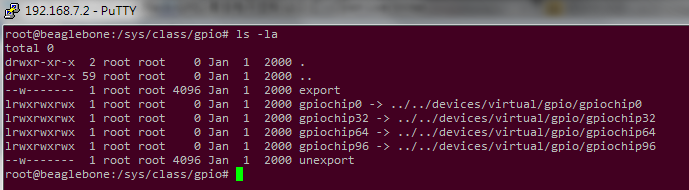
BBB 开机,然后进去文件夹 /etc/class/gpio/,里面有个 export 和 unexport 文件:

看之前的图查到,P9_23 的 gpio 号是 49,需要用的话,echo 49 > export。用完不要了就 echo 49 > unexport。首先我们 export 一下:

目录多了一个 link,cd 进去看看,能做的都在里面:

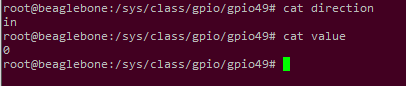
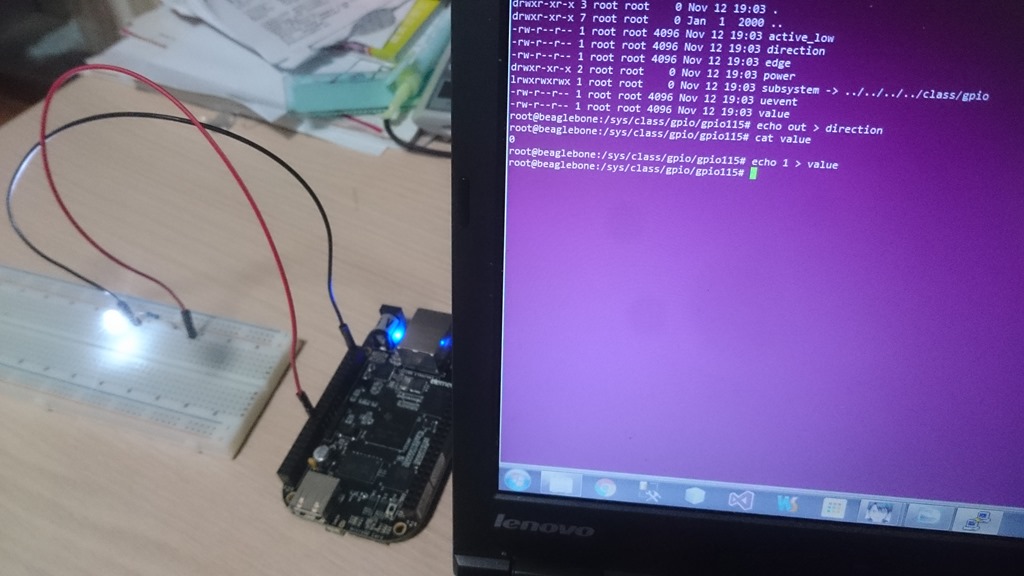
要点灯,我们现在只需要关心 direction (方向,输入还是输出),和 value (1,高电平 ,0,低电平)。可以 cat 一下看看当前值:

首先把 direction 改为 out,做法:echo out > direction。然后把输出值改为高电平,echo 1 > value。


如无意外,LED 是亮着的了。关掉它的话,改为低电平,echo 0 > value。就是说,要它闪动,就 0 和 1 之间循环赋值。
讲完了,只不过是这样而已。还有几个 LED 还没用呢?

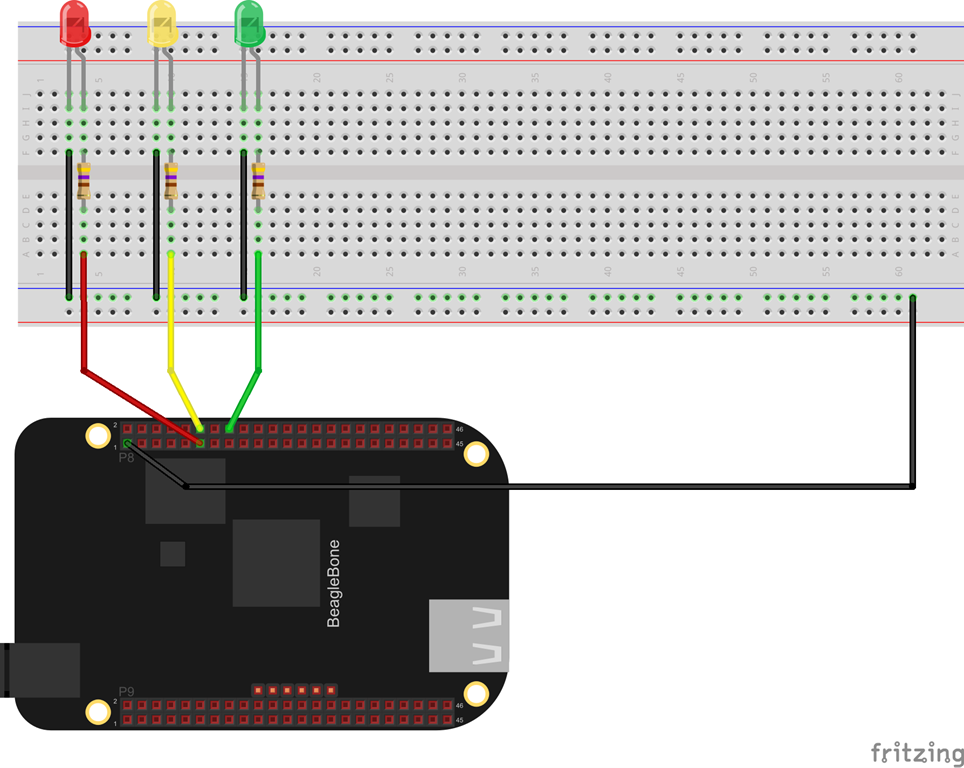
全部负极面包板上减号、蓝线那列,尽头接 BBB 的 GND。正极接 BBB 的 GPIO,我用了 P8_12、P8_11、P8_16, GPIO 号为 44、45、46,即可。各个语言都差不多,以下是 Python 代码:
import time
import os
class TrafficLight:
def __init__(self,color):
self.color = color
if self.color == "green":
self.gpio_no = 44
if self.color == "yellow":
self.gpio_no = 45
if self.color == "red":
self.gpio_no = 46
os.system("echo %s > /sys/class/gpio/export" % self.gpio_no)
self.path = "/sys/class/gpio/gpio%s/" % self.gpio_no
os.system("echo out > %sdirection" % self.path)
os.system("echo 0 > %svalue" % self.path)
self.state = "off"
def On(self):
if self.state != "on":
os.system("echo 1 > %svalue" % self.path)
self.state = "on"
def Off(self):
if self.state != "off":
os.system("echo 0 > %svalue" % self.path)
self.state = "off"
TrafficLights = [TrafficLight("green"), TrafficLight("yellow"), TrafficLight("red")]
while True:
TrafficLights[0].On()
time.sleep(3)
TrafficLights[0].Off()
TrafficLights[1].On()
time.sleep(1)
TrafficLights[1].Off()
time.sleep(0.5)
TrafficLights[1].On()
time.sleep(0.5)
TrafficLights[1].Off()
time.sleep(0.5)
TrafficLights[1].On()
time.sleep(1)
TrafficLights[2].On()
TrafficLights[1].Off()
time.sleep(4)
TrafficLights[2].Off()
请原谅我 while 里面那丑陋的代码。创建 TrafficLight 实例时候,export,调 direction,On 就给 value 1,Off 就 0。由于是 While True,没有 unexport 了。

最后是这些制作过程,我承认这比较无聊…
这次的全部材料:
BBB 一台
购买 BBB 自带的 USB 数据线
面包板一块
470Ω 三枚(至少一枚)
白、红、黄、绿 LED 灯各一个(至少一个)
公对公杜邦线 4 条(至少两条)
面包板供电模块 3.3v (可选)
纸卡一张(可选)
万用表(可选)
点亮白灯
首先,据书上以及其他师兄建议,用面包板测试成功才拿 BBB 开刀。这次也不是什么复杂电路。但完全没有接触过面板包的话,试试吧:面包板装上电源模块,注意正负极,红线正极,搞反了面包板红色和蓝色反过来的话,就考验你记忆力了。
供电模块如果能调电压,就调到 3.3V,然后接线。如果不知道面包板线路方向的话,这样的:
 | 右图红线大概表示,板内线路相连的情况,图中两侧正负极(板上原有的红线和蓝线)是纵向全部相连,板中间分开左右两组,两组互不相连,但每组每行内五个孔相连。 |

不会用万用表的话请自行百度。
LED 灯长脚是正极,两条杜邦线分别接正负极,中间是 470欧电阻,小心元件的金属脚不要互相碰到即可。连接后如下图:
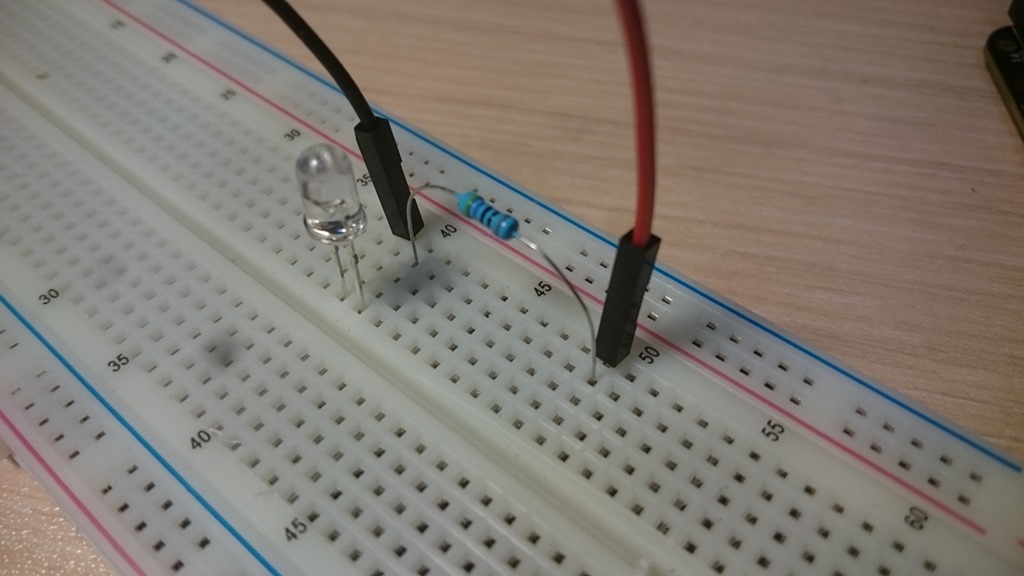
上电,亮了,这不应该会搞错吧:

比较暗请无视。用 470欧 是因为,欧姆定律 + 官方说明, BBB GPIO 顶多给 5mA 电流,拉多了发生了什么事的话,后果自负。
几个 mA 我还以为不亮了…。继续,插进去 BBB。
首先要知道引脚功能:
个引脚详细说明,默认功能,系统是否已占用等等,P8 高清版请看这里,P9 高清版请看这里。打不开请自行FQ。
最左侧 PIN 是 pin 名,把 BBB 摆正V5电源和网线插头在上方的话,右排就是 P8,左排 P9,每排左上角是一号脚,右上角是二号脚,如此类推。详细说明请自己看说明书。
红色底色代表默认被占用。比如 HDMI, eMMC。它是通过 cape manager 来管理,调用引脚的。题外话,我见过有人为了这个把 cape manager 卸载掉… 。开机档可以禁用该 cape 的,到我需要时候再试试看吧。
上图 mode 0 至 7 可以调的,后话。现在只需要关心是有否被占用,实际是哪个引脚要插线,还有它的 GPIO 号是多少(第四栏)。
现在把面包板的电源模块拔掉,BBB 关机情况下,把原来的负极接 BBB 的 P9_1 GND,正极接 P9_23 :
BBB 开机,然后进去文件夹 /etc/class/gpio/,里面有个 export 和 unexport 文件:
看之前的图查到,P9_23 的 gpio 号是 49,需要用的话,echo 49 > export。用完不要了就 echo 49 > unexport。首先我们 export 一下:
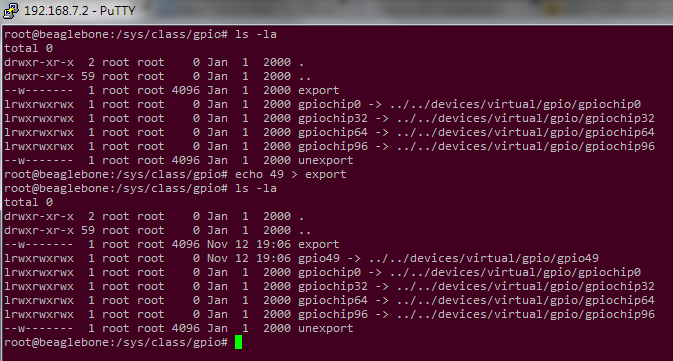
目录多了一个 link,cd 进去看看,能做的都在里面:

要点灯,我们现在只需要关心 direction (方向,输入还是输出),和 value (1,高电平 ,0,低电平)。可以 cat 一下看看当前值:
首先把 direction 改为 out,做法:echo out > direction。然后把输出值改为高电平,echo 1 > value。

如无意外,LED 是亮着的了。关掉它的话,改为低电平,echo 0 > value。就是说,要它闪动,就 0 和 1 之间循环赋值。
讲完了,只不过是这样而已。还有几个 LED 还没用呢?
点亮三色灯
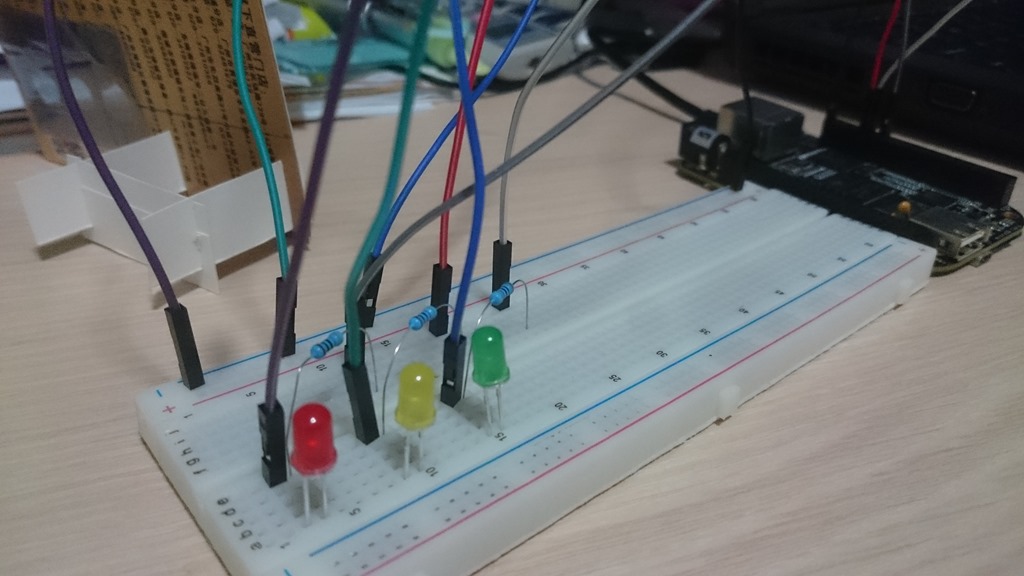
全部负极面包板上减号、蓝线那列,尽头接 BBB 的 GND。正极接 BBB 的 GPIO,我用了 P8_12、P8_11、P8_16, GPIO 号为 44、45、46,即可。各个语言都差不多,以下是 Python 代码:
import time
import os
class TrafficLight:
def __init__(self,color):
self.color = color
if self.color == "green":
self.gpio_no = 44
if self.color == "yellow":
self.gpio_no = 45
if self.color == "red":
self.gpio_no = 46
os.system("echo %s > /sys/class/gpio/export" % self.gpio_no)
self.path = "/sys/class/gpio/gpio%s/" % self.gpio_no
os.system("echo out > %sdirection" % self.path)
os.system("echo 0 > %svalue" % self.path)
self.state = "off"
def On(self):
if self.state != "on":
os.system("echo 1 > %svalue" % self.path)
self.state = "on"
def Off(self):
if self.state != "off":
os.system("echo 0 > %svalue" % self.path)
self.state = "off"
TrafficLights = [TrafficLight("green"), TrafficLight("yellow"), TrafficLight("red")]
while True:
TrafficLights[0].On()
time.sleep(3)
TrafficLights[0].Off()
TrafficLights[1].On()
time.sleep(1)
TrafficLights[1].Off()
time.sleep(0.5)
TrafficLights[1].On()
time.sleep(0.5)
TrafficLights[1].Off()
time.sleep(0.5)
TrafficLights[1].On()
time.sleep(1)
TrafficLights[2].On()
TrafficLights[1].Off()
time.sleep(4)
TrafficLights[2].Off()
请原谅我 while 里面那丑陋的代码。创建 TrafficLight 实例时候,export,调 direction,On 就给 value 1,Off 就 0。由于是 While True,没有 unexport 了。
最后是这些制作过程,我承认这比较无聊…
 |  |  |
 |  |  |

相关文章推荐
- 简单的购物车UI界面
- 服务器端cs文件
- 用OpenCV实现随机发生器与文本
- Andriod-Seamless-ViewPager-Header的一些用法总结,感谢作者!
- Markdown---语法小记
- 组件 插件 控件
- warning C4996: 'strcpy': This function or variable may be unsafe. Consider using strcpy_s instead. T
- Java VM
- templating(模板)
- ASP.NET基础(一)
- Redis和Memcached的区别
- java基础
- 5 jQuery.each() Function Examples
- 计算机网络-TCP/IP参考模型Reference Model)
- 论文Android杂记录
- POP3 SMTP IMAP Exchange
- jquery中字符串数组相符转换
- 为实现真正的点击空白收起键盘,让UITableView响应touch事件
- iOS CAEmitterLayer简介,基于CAEmitterLayer实现粒子效果 —— HERO博客
- nyoj232 How to eat more Banana (LIS变形)