凸包 graham 算法
2015-12-20 17:29
302 查看
http://blog.csdn.net/javasui/article/details/6759777
向量:
1.向量的内积(数量积,点乘):
公式:a· b = |a| * |b| cos<a, b>=a.x*
b.y + b.x * a.y
2.向量的外积(向量积,差乘):
公式:|c|= |a|*|b|*sin<a, b> = a.x * b.y - b.x * a.y
意义:
1).两个向量和坐标原点所围成的面积(可正可负)。
2).值为正值表示向量a在向量b的顺时针方向,反之,向量a在向量b的逆时针方向,相等时,共线.
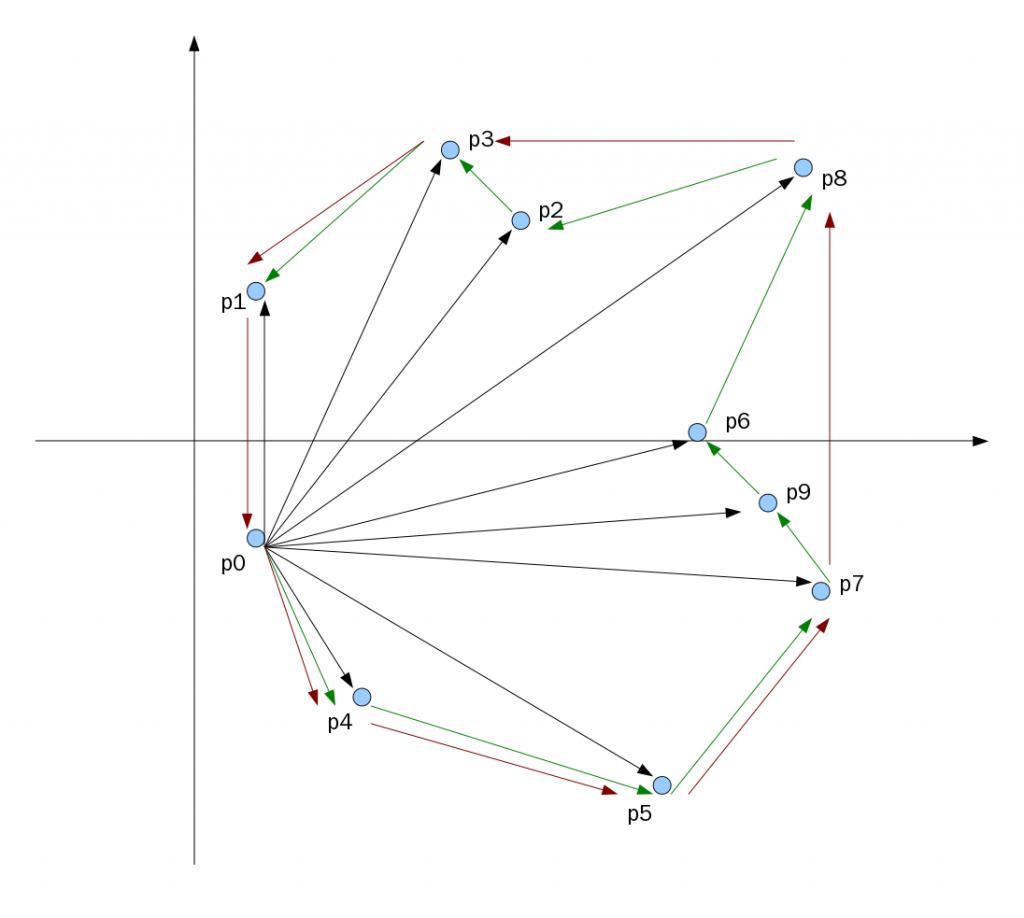
凸包:由平面上的最小点所围成的多边形,平面上任何其它的点都在这个多边形内部,这个多边形就称为
凸包。
(图1)
graham算法:
第一步:选取x轴坐标最小的点,如果存在多个选y轴坐标最小的点.(如图1,p0点)
第二步:排序
4000
.从下到上扫描有其它点.(如图1)扫描的结果顺序,p0,
p4, p5, p7, p9,p6, p8, p2,p3, p1.
数学公式向量的外积模公式:|c|(是模不是绝对值符号)=
|a|*|b|*sin<a, b> = a.x * b.y – b.x * a.y
|c|> 0:向量a在向量b的顺时针方向,因为此例原点坐标取x轴坐标最小的点,所以,向量a在向
量b的下方.(p0-p4线段在p0-p5的下方).
|c|= 0:共线时,按照与原点距离由小到大的顺序.
第三步:按照第二步得到的顶点顺序进行graham扫描.按照本例选取的原点方式,当扫描到左拐(p0,p4,
p5)时保留(p4),右拐(p9,p6,
p8)时删除顶点(p6),结果就是凸包的顶点集.(绿线扫描的顺序,红线为左拐点).共线时,删除距离较小的点.
注意:右拐删除结点时,必须回溯与前面保留的点重新比较,因为删除一个点后先前拐点性质会发生变化
例如:删除p6后,(p7,
p9, p8) 也是右拐了.
所谓的左拐/右拐就沿着边界扫描后,其它的点是否在当前点与下一点连线与原点的内部.
例如:结果p7-p8是凸包的顶点,p7-p8直线会把所有其它点挡在原点p0方向的一侧.
数学公式:
向量外积模公式
例:
p5– p4向量Xp0 – p4 向量>0,
(p5–p4)在(p0–p4)的顺时针方向,左拐
p8– p6向量Xp9 – p6向量<0,
(p8–p6)在(p9–p6)的逆时针方向,右拐
也可以采用其它向量方式
例:
p4–p0向量Xp5–p0向量>0,
(p4–p0)在(p5–p0)的顺时针方向,左拐
p6–p9向量Xp8–p9向量<0,
(p6–p9)在(p8–p9)的逆时针方向,右拐
示例程序:
p0:(1, -2)
p1:(1, 2)
p2:(5, 3)
p3:(4,5)
p4:(2, -4)
p5:(6, -6)
p6:(7, 0)
p7:(10, -3)
p8:(9, 4)
p9:(8, -1)
input:
10
1 -2
1 2
5 3
4 5
2 -4
6 -6
7 0
10-3
9 4
8 -1
output:
1 -2
2 -4
6 -6
10-3
9 4
4 5
1 2
源代码:
#include <iostream>
#include <algorithm>
#include <vector>
#include <fstream>
#define MAX_NUMS 10
typedef struct
{
int x;
int y;
} veritice;
veritice vet[MAX_NUMS];
int n;
std::vector<veritice> v;
inline int cross(const veritice& p0, const veritice& p1, const veritice& p2)
{
veritice u, v;
u.x = p1.x - p0.x, u.y = p1.y - p0.y;
v.x = p2.x - p0.x, v.y = p2.y - p0.y;
return v.x * u.y - u.x * v.y;
}
inline int distance(const veritice& p1, const veritice& p2)
{
return (p2.x - p1.x) * (p2.x - p1.x) + (p2.y - p1.y) * (p2.y - p1.y);
}
inline int graham_compare(const void* a, const void* b)
{
int result = cross(vet[0], *(veritice*)a, *(veritice*)b);
if(result)
return result;
return distance(vet[0], *(veritice*)a) - distance(vet[0], *(veritice*)b);
}
inline void graham_scan()
{
v.push_back(vet[0]);
v.push_back(vet[1]);
for(int i = 2; i < n; i++)
{
while( cross(v[v.size() - 1], v[v.size() - 2], vet[i]) <= 0)
v.pop_back();
v.push_back(vet[i]);
}
}
int main()
{
std::ifstream in("case_in");
int index = 0;
in >> n;
for(int i = 0; i < n; i++)
{
in >> vet[i].x >> vet[i].y;
if(vet[0].x > vet[i].x || (vet[0].x == vet[i].x && vet[0].y > vet[i].y))
index = i;
}
in.close();
// 第一步
veritice temp;
temp.x = vet[0].x, temp.y = vet[0].y;
vet[0].x = vet[index].x, vet[0].y = vet[index].y;
vet[index].x = temp.x, vet[index].y = temp.y;
// 第二步
qsort(vet + 1, n - 1, sizeof(veritice), graham_compare);
// 第三步
graham_scan();
// 输出
for(unsigned int i = 0; i < v.size(); i++)
std::cout << v[i].x << ' ' << v[i].y << std::endl;
return 0;
}
向量:
1.向量的内积(数量积,点乘):
公式:a· b = |a| * |b| cos<a, b>=a.x*
b.y + b.x * a.y
2.向量的外积(向量积,差乘):
公式:|c|= |a|*|b|*sin<a, b> = a.x * b.y - b.x * a.y
意义:
1).两个向量和坐标原点所围成的面积(可正可负)。
2).值为正值表示向量a在向量b的顺时针方向,反之,向量a在向量b的逆时针方向,相等时,共线.
凸包:由平面上的最小点所围成的多边形,平面上任何其它的点都在这个多边形内部,这个多边形就称为
凸包。
(图1)
graham算法:
第一步:选取x轴坐标最小的点,如果存在多个选y轴坐标最小的点.(如图1,p0点)
第二步:排序
4000
.从下到上扫描有其它点.(如图1)扫描的结果顺序,p0,
p4, p5, p7, p9,p6, p8, p2,p3, p1.
数学公式向量的外积模公式:|c|(是模不是绝对值符号)=
|a|*|b|*sin<a, b> = a.x * b.y – b.x * a.y
|c|> 0:向量a在向量b的顺时针方向,因为此例原点坐标取x轴坐标最小的点,所以,向量a在向
量b的下方.(p0-p4线段在p0-p5的下方).
|c|= 0:共线时,按照与原点距离由小到大的顺序.
第三步:按照第二步得到的顶点顺序进行graham扫描.按照本例选取的原点方式,当扫描到左拐(p0,p4,
p5)时保留(p4),右拐(p9,p6,
p8)时删除顶点(p6),结果就是凸包的顶点集.(绿线扫描的顺序,红线为左拐点).共线时,删除距离较小的点.
注意:右拐删除结点时,必须回溯与前面保留的点重新比较,因为删除一个点后先前拐点性质会发生变化
例如:删除p6后,(p7,
p9, p8) 也是右拐了.
所谓的左拐/右拐就沿着边界扫描后,其它的点是否在当前点与下一点连线与原点的内部.
例如:结果p7-p8是凸包的顶点,p7-p8直线会把所有其它点挡在原点p0方向的一侧.
数学公式:
向量外积模公式
例:
p5– p4向量Xp0 – p4 向量>0,
(p5–p4)在(p0–p4)的顺时针方向,左拐
p8– p6向量Xp9 – p6向量<0,
(p8–p6)在(p9–p6)的逆时针方向,右拐
也可以采用其它向量方式
例:
p4–p0向量Xp5–p0向量>0,
(p4–p0)在(p5–p0)的顺时针方向,左拐
p6–p9向量Xp8–p9向量<0,
(p6–p9)在(p8–p9)的逆时针方向,右拐
示例程序:
p0:(1, -2)
p1:(1, 2)
p2:(5, 3)
p3:(4,5)
p4:(2, -4)
p5:(6, -6)
p6:(7, 0)
p7:(10, -3)
p8:(9, 4)
p9:(8, -1)
input:
10
1 -2
1 2
5 3
4 5
2 -4
6 -6
7 0
10-3
9 4
8 -1
output:
1 -2
2 -4
6 -6
10-3
9 4
4 5
1 2
源代码:
#include <iostream>
#include <algorithm>
#include <vector>
#include <fstream>
#define MAX_NUMS 10
typedef struct
{
int x;
int y;
} veritice;
veritice vet[MAX_NUMS];
int n;
std::vector<veritice> v;
inline int cross(const veritice& p0, const veritice& p1, const veritice& p2)
{
veritice u, v;
u.x = p1.x - p0.x, u.y = p1.y - p0.y;
v.x = p2.x - p0.x, v.y = p2.y - p0.y;
return v.x * u.y - u.x * v.y;
}
inline int distance(const veritice& p1, const veritice& p2)
{
return (p2.x - p1.x) * (p2.x - p1.x) + (p2.y - p1.y) * (p2.y - p1.y);
}
inline int graham_compare(const void* a, const void* b)
{
int result = cross(vet[0], *(veritice*)a, *(veritice*)b);
if(result)
return result;
return distance(vet[0], *(veritice*)a) - distance(vet[0], *(veritice*)b);
}
inline void graham_scan()
{
v.push_back(vet[0]);
v.push_back(vet[1]);
for(int i = 2; i < n; i++)
{
while( cross(v[v.size() - 1], v[v.size() - 2], vet[i]) <= 0)
v.pop_back();
v.push_back(vet[i]);
}
}
int main()
{
std::ifstream in("case_in");
int index = 0;
in >> n;
for(int i = 0; i < n; i++)
{
in >> vet[i].x >> vet[i].y;
if(vet[0].x > vet[i].x || (vet[0].x == vet[i].x && vet[0].y > vet[i].y))
index = i;
}
in.close();
// 第一步
veritice temp;
temp.x = vet[0].x, temp.y = vet[0].y;
vet[0].x = vet[index].x, vet[0].y = vet[index].y;
vet[index].x = temp.x, vet[index].y = temp.y;
// 第二步
qsort(vet + 1, n - 1, sizeof(veritice), graham_compare);
// 第三步
graham_scan();
// 输出
for(unsigned int i = 0; i < v.size(); i++)
std::cout << v[i].x << ' ' << v[i].y << std::endl;
return 0;
}

相关文章推荐
- how to understand fft
- 1. SVN (1)
- vim 基础学习之global
- WordPress博客彻底关闭图片缩略图功能的方法
- WP Super Cache+七牛云配置CDN加速,让你的网站秒开
- RAID各级别特性
- Effective C++中文版 条款41-44
- node jade学习笔记
- 发送邮件的方式源代码可参考如下代码
- Eclipse的堆回收器视图
- 数据采集的了解
- Python输出一个杨辉三角
- 数据结构与算法 LeetCode编程练习--Search in Rotated array II
- 表单控件
- 怎样实现企业管理系统的操作日志功能
- Leetcode valid-parentheses
- struts2中的文件上传
- JavaScript-事件
- Android注解学习(1)
- HDU 4027