机器手臂(2):机械手臂关节研究
2015-12-17 20:35
381 查看
本文的原文连接是: http://blog.csdn.net/freewebsys/article/details/50340883 未经博主允许不得转载。
博主地址是:http://blog.csdn.net/freewebsys
arm_base手臂底座
arm_1 关节1
hand 机械手
实现一个最简单的,机械手臂,需要4个舵机,为了方便我购买的舵机都是一样的MG955。
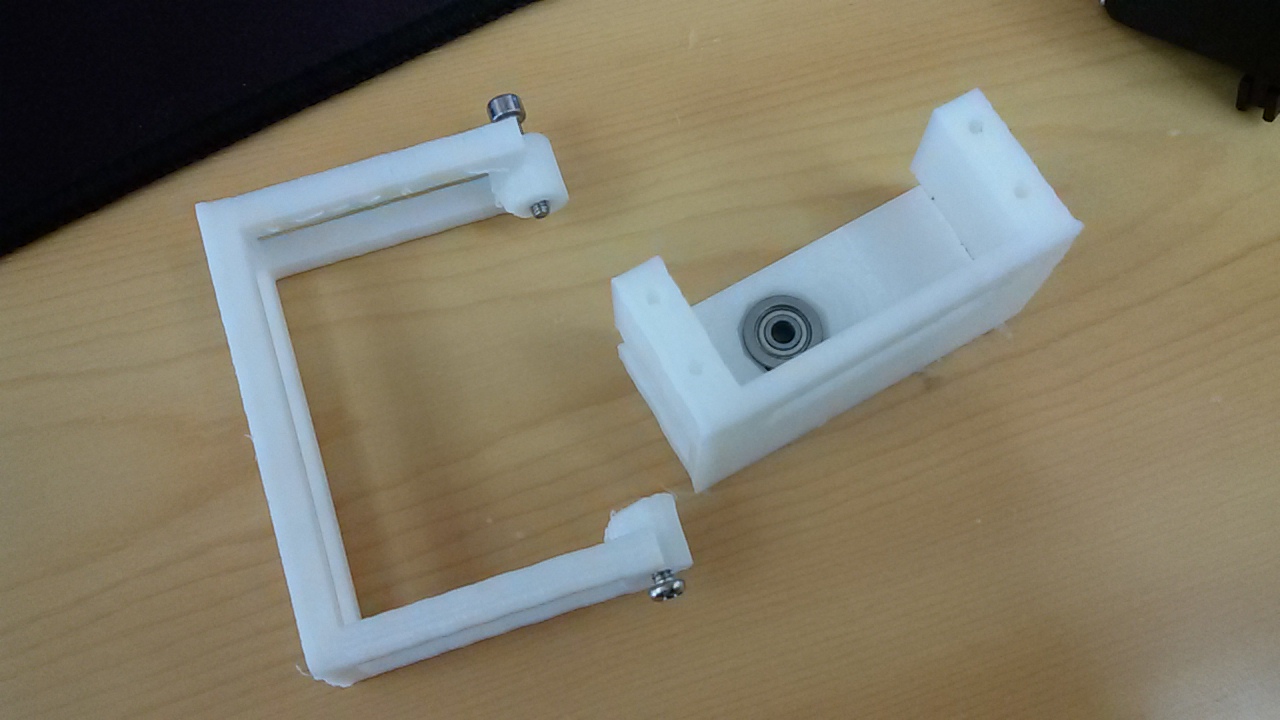
打印好的关节
在舵机支架上面增加一个法兰盘的孔,放入法兰盘。
另外一端和舵机上面的金属铜齿固定。
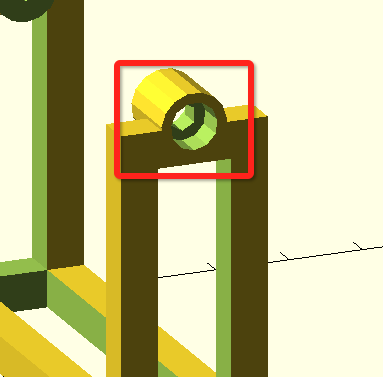
金属铜齿中间有螺丝孔,可以安装螺丝固定。
在设计关节上面专门留了螺丝孔,方便安装螺丝。
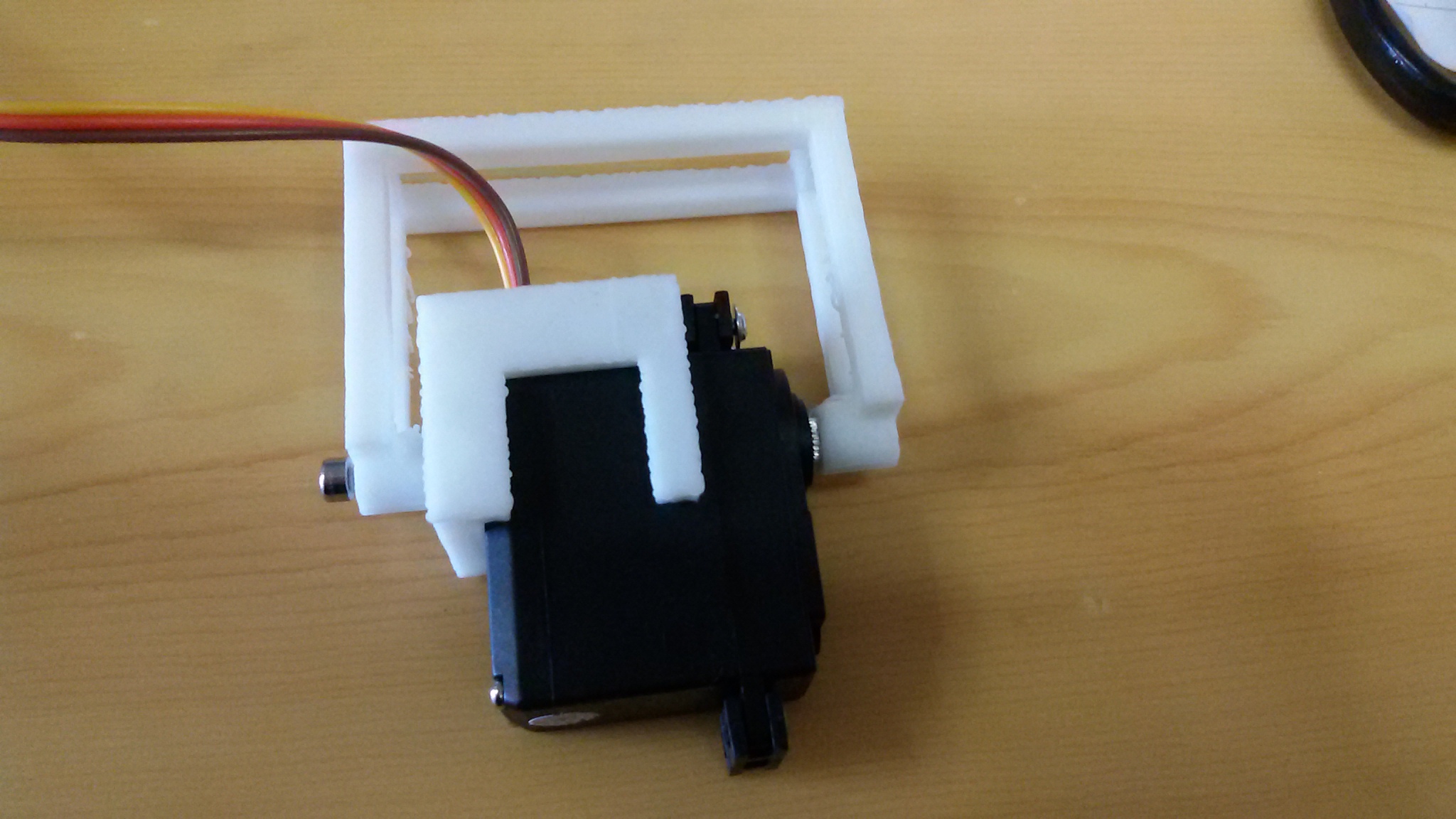
安装好了的效果,因为测试使用,所以另外一半没有打印。
机械手臂关节
博主地址是:http://blog.csdn.net/freewebsys
研究出一个机器人手臂的最小单元之后,就很容易组装成一个机器手臂了。
两个关节接上就是一个机器手臂了。继续努力,很快就能做出一个机器手臂了。
源代码会陆续放到github上面:
https://github.com/freewebsys/arm_hand_openscad
博主地址是:http://blog.csdn.net/freewebsys
1,设计手臂
第一个版本机械手臂:arm_base手臂底座
arm_1 关节1
hand 机械手
实现一个最简单的,机械手臂,需要4个舵机,为了方便我购买的舵机都是一样的MG955。
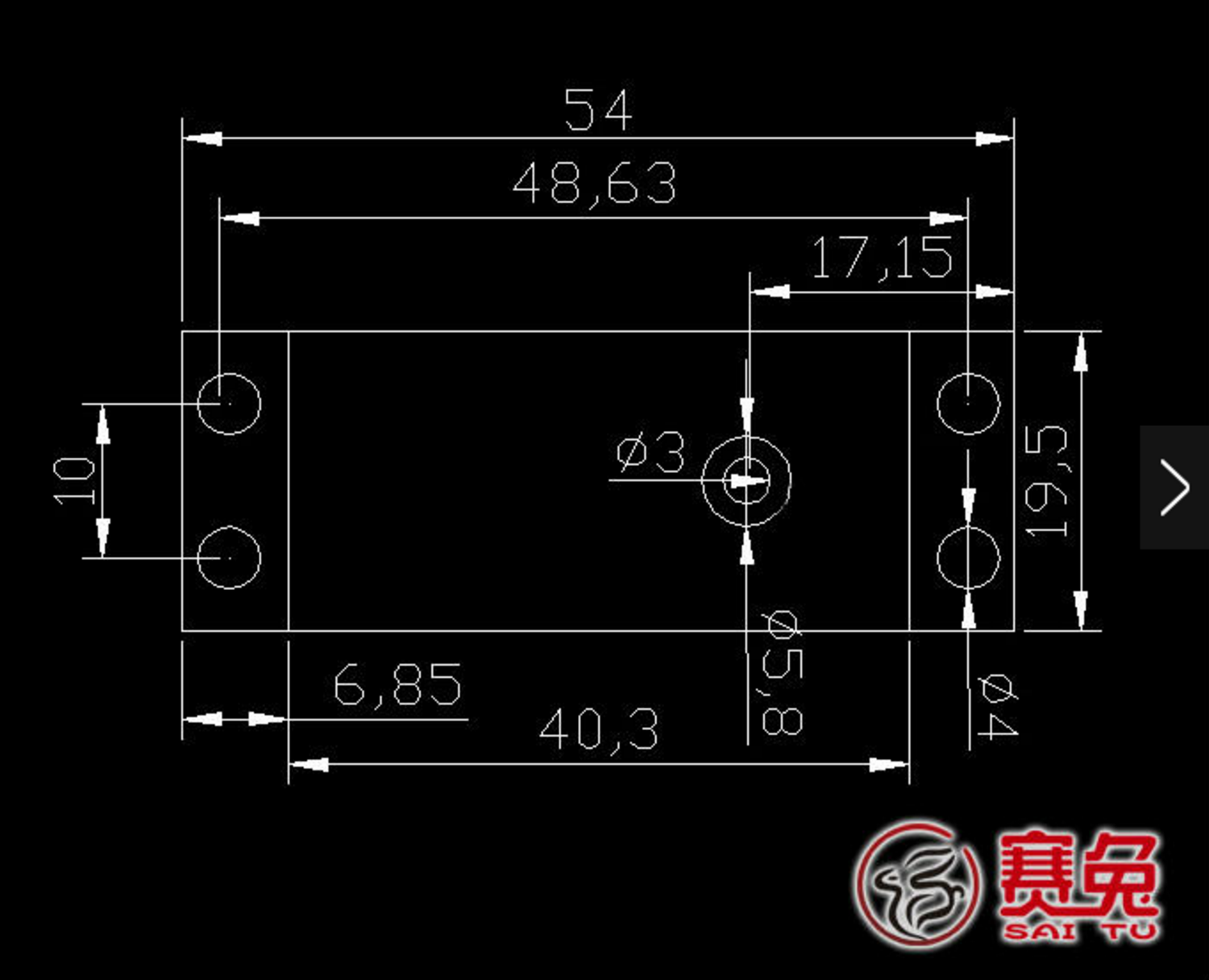
2,关节设计
好不容易才从网上找到一个 mg955 舵机的工程图。知道参数细节。打印好的关节
在舵机支架上面增加一个法兰盘的孔,放入法兰盘。
另外一端和舵机上面的金属铜齿固定。
金属铜齿中间有螺丝孔,可以安装螺丝固定。
在设计关节上面专门留了螺丝孔,方便安装螺丝。
安装好了的效果,因为测试使用,所以另外一半没有打印。
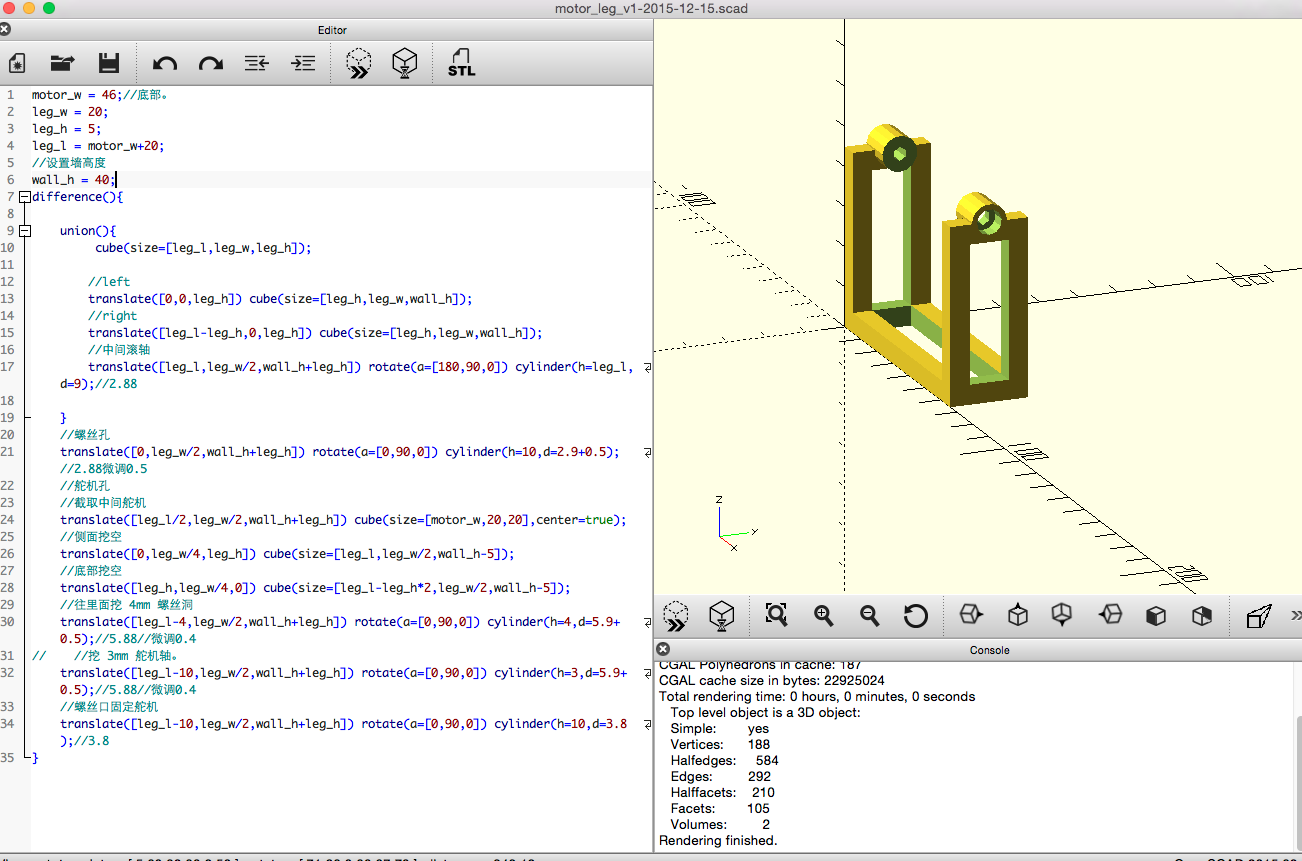
3,openscad设计图
motor_w = 46;//底部。
leg_w = 20;
leg_h = 5;
leg_l = motor_w+20;
//设置墙高度
wall_h = 40;
difference(){
union(){
cube(size=[leg_l,leg_w,leg_h]);
//left
translate([0,0,leg_h]) cube(size=[leg_h,leg_w,wall_h]);
//right
translate([leg_l-leg_h,0,leg_h]) cube(size=[leg_h,leg_w,wall_h]);
//中间滚轴
translate([leg_l,leg_w/2,wall_h+leg_h]) rotate(a=[180,90,0]) cylinder(h=leg_l,d=9);//2.88
}
//螺丝孔
translate([0,leg_w/2,wall_h+leg_h]) rotate(a=[0,90,0]) cylinder(h=10,d=2.9+0.5);//2.88微调0.5
//舵机孔
//截取中间舵机
translate([leg_l/2,leg_w/2,wall_h+leg_h]) cube(size=[motor_w,20,20],center=true);
//侧面挖空
translate([0,leg_w/4,leg_h]) cube(size=[leg_l,leg_w/2,wall_h-5]);
//底部挖空
translate([leg_h,leg_w/4,0]) cube(size=[leg_l-leg_h*2,leg_w/2,wall_h-5]);
//往里面挖 4mm 螺丝洞
translate([leg_l-4,leg_w/2,wall_h+leg_h]) rotate(a=[0,90,0]) cylinder(h=4,d=5.9+0.5);//5.88//微调0.4
// //挖 3mm 舵机轴。
translate([leg_l-10,leg_w/2,wall_h+leg_h]) rotate(a=[0,90,0]) cylinder(h=3,d=5.9+0.5);//5.88//微调0.4
//螺丝口固定舵机
translate([leg_l-10,leg_w/2,wall_h+leg_h]) rotate(a=[0,90,0]) cylinder(h=10,d=3.8);//3.8
}机械手臂关节
4,总结
本文的原文连接是: http://blog.csdn.net/freewebsys/article/details/50340883 未经博主允许不得转载。博主地址是:http://blog.csdn.net/freewebsys
研究出一个机器人手臂的最小单元之后,就很容易组装成一个机器手臂了。
两个关节接上就是一个机器手臂了。继续努力,很快就能做出一个机器手臂了。
源代码会陆续放到github上面:
https://github.com/freewebsys/arm_hand_openscad

相关文章推荐
- 微信公众平台开发教程(四) 实例入门:机器人回复(附源码)
- asp.net(c#)捕捉搜索引擎蜘蛛和机器人
- 使用图灵api创建微信聊天机器人
- 安卓(Android)聊天机器人实现代码分享
- 什么是android(What Is Android?)
- 开源硬件的价值评估
- 三星i9158刷机教程
- Nagios调用短信接口
- http协议状态码详解
- 50年后人工智能将成为人类最大的威胁
- 实用工具类 GTalk机器人
- 如何处理计划中的网站关闭事件
- Web工程师的工具箱
- 美团网2014校招笔试题及解答(长沙站+哈尔滨站)
- [极客]硬件极客最爱:支持WiFi的Arduino板到来
- 2014第二届上海国际3D打印技术展览会暨研讨会
- pcDuino上控制视频监控机器人
- 人形机器人----俯卧撑(参数)
- 分享一些机器人相关学习网址
- (一) 驱动模块搭建与测试