OpenCV的ORB特征提取算法
2015-12-02 10:16
561 查看
看到OpenCV2.3.1里面ORB特征提取算法也在里面了,套用给的SURF特征例子程序改为ORB特征一直提示错误,类型不匹配神马的,由于没有找到示例程序,只能自己找答案。
(ORB特征论文:ORB: an efficient alternative to SIFT or SURF.点击下载论文)
经过查找发现:
描述符数据类型有是float的,比如说SIFT,SURF描述符,还有是uchar的,比如说有ORB,BRIEF
对于float 匹配方式有:
FlannBased
BruteForce<L2<float> >
BruteForce<SL2<float> >
BruteForce<L1<float> >
对于uchar有:
BruteForce<Hammin>
BruteForce<HammingLUT>
BruteForceMatcher< L2<float> > matcher;//改动的地方
BruteForceMatcher< L2<float> > matcher;//改动的地方
完整代码如下:
另外: SURF SIFT
效果:
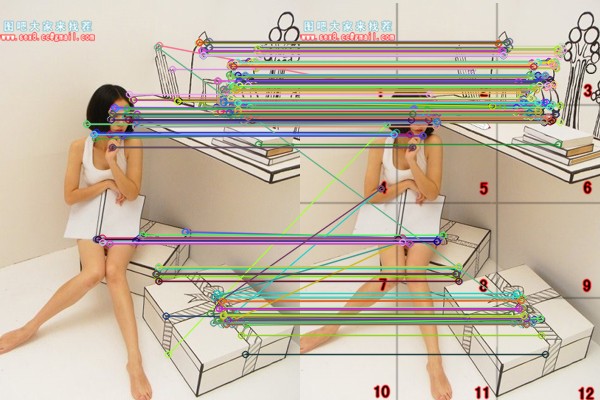
另外一个是寻找目标匹配
在右边的场景图里面寻找左边那幅图的starbucks标志
效果如下:

需要在之前的那个imshow之前加上如下代码即可完成一个简单的功能展示:
(ORB特征论文:ORB: an efficient alternative to SIFT or SURF.点击下载论文)
经过查找发现:
描述符数据类型有是float的,比如说SIFT,SURF描述符,还有是uchar的,比如说有ORB,BRIEF
对于float 匹配方式有:
FlannBased
BruteForce<L2<float> >
BruteForce<SL2<float> >
BruteForce<L1<float> >
对于uchar有:
BruteForce<Hammin>
BruteForce<HammingLUT>
BruteForceMatcher< L2<float> > matcher;//改动的地方
BruteForceMatcher< L2<float> > matcher;//改动的地方
完整代码如下:
<span style="font-family:Microsoft YaHei;">#include <iostream>
#include "opencv2/core/core.hpp"
#include "opencv2/features2d/features2d.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
#include <vector>
using namespace cv;
using namespace std;
int main()
{
Mat img_1 = imread("D:\\image\\img1.jpg");
Mat img_2 = imread("D:\\image\\img2.jpg");
if (!img_1.data || !img_2.data)
{
cout << "error reading images " << endl;
return -1;
}
ORB orb;
vector<KeyPoint> keyPoints_1, keyPoints_2;
Mat descriptors_1, descriptors_2;
orb(img_1, Mat(), keyPoints_1, descriptors_1);
orb(img_2, Mat(), keyPoints_2, descriptors_2);
BruteForceMatcher<HammingLUT> matcher;
vector<DMatch> matches;
matcher.match(descriptors_1, descriptors_2, matches);
double max_dist = 0; double min_dist = 100;
//-- Quick calculation of max and min distances between keypoints
for( int i = 0; i < descriptors_1.rows; i++ )
{
double dist = matches[i].distance;
if( dist < min_dist ) min_dist = dist;
if( dist > max_dist ) max_dist = dist;
}
printf("-- Max dist : %f \n", max_dist );
printf("-- Min dist : %f \n", min_dist );
//-- Draw only "good" matches (i.e. whose distance is less than 0.6*max_dist )
//-- PS.- radiusMatch can also be used here.
std::vector< DMatch > good_matches;
for( int i = 0; i < descriptors_1.rows; i++ )
{
if( matches[i].distance < 0.6*max_dist )
{
good_matches.push_back( matches[i]);
}
}
Mat img_matches;
drawMatches(img_1, keyPoints_1, img_2, keyPoints_2,
good_matches, img_matches, Scalar::all(-1), Scalar::all(-1),
vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
imshow( "Match", img_matches);
cvWaitKey();
return 0;
} </span>另外: SURF SIFT
<span style="font-family:Microsoft YaHei;">/* SIFT sift; sift(img_1, Mat(), keyPoints_1, descriptors_1); sift(img_2, Mat(), keyPoints_2, descriptors_2); BruteForceMatcher<L2<float> > matcher; */ /* SURF surf; surf(img_1, Mat(), keyPoints_1); surf(img_2, Mat(), keyPoints_2); SurfDescriptorExtractor extrator; extrator.compute(img_1, keyPoints_1, descriptors_1); extrator.compute(img_2, keyPoints_2, descriptors_2); BruteForceMatcher<L2<float> > matcher; */</span>
效果:
另外一个是寻找目标匹配
在右边的场景图里面寻找左边那幅图的starbucks标志
效果如下:
需要在之前的那个imshow之前加上如下代码即可完成一个简单的功能展示:
<span style="font-family:Microsoft YaHei;">// localize the object
std::vector<Point2f> obj;
std::vector<Point2f> scene;
for (size_t i = 0; i < good_matches.size(); ++i)
{
// get the keypoints from the good matches
obj.push_back(keyPoints_1[ good_matches[i].queryIdx ].pt);
scene.push_back(keyPoints_2[ good_matches[i].trainIdx ].pt);
}
Mat H = findHomography( obj, scene, CV_RANSAC );
// get the corners from the image_1
std::vector<Point2f> obj_corners(4);
obj_corners[0] = cvPoint(0,0);
obj_corners[1] = cvPoint( img_1.cols, 0);
obj_corners[2] = cvPoint( img_1.cols, img_1.rows);
obj_corners[3] = cvPoint( 0, img_1.rows);
std::vector<Point2f> scene_corners(4);
perspectiveTransform( obj_corners, scene_corners, H);
// draw lines between the corners (the mapped object in the scene - image_2)
line( img_matches, scene_corners[0] + Point2f( img_1.cols, 0), scene_corners[1] + Point2f( img_1.cols, 0),Scalar(0,255,0));
line( img_matches, scene_corners[1] + Point2f( img_1.cols, 0), scene_corners[2] + Point2f( img_1.cols, 0),Scalar(0,255,0));
line( img_matches, scene_corners[2] + Point2f( img_1.cols, 0), scene_corners[3] + Point2f( img_1.cols, 0),Scalar(0,255,0));
line( img_matches, scene_corners[3] + Point2f( img_1.cols, 0), scene_corners[0] + Point2f( img_1.cols, 0),Scalar(0,255,0)); </span>

相关文章推荐
- 利用网站模板创建子网站
- awk中使用shell的环境变量
- 误将SELINUXTYPE看成SELINUX后,将其值改为disabled。导致操作系统服务启动
- Linux显示文本文件内容(cat, less)
- linux 获取本地文件最后修改时间 c++
- Apache Shiro的(what、why、who)保护你的应用程序
- popupWindow显示问题
- unable to execute No such file or directory,32位linux编译的程序在64位linux运行不了
- SharePoint将网站另存为模板
- shell 基本学习
- SELinux 关闭重启方法
- OpenGL step by step - tutorial_1 "a hello window"
- Apache Shiro权限管理框架的初次认识
- 【转载】使用OpenCV的OpenCL(ocl)模块
- SHELL脚本的一些特殊用法
- 分布式应用中网络故障和分区的docker测试框架Blockade
- 淘宝应对"双11"的技术架构分析
- -Dmaven.multiModuleProjectDirectory system property is not set. Check $M2_HOME environment variabl
- Linux Shell下的后台运行及其前台的转换
- 总结 好用的工具/网站/插件