LSD-SLAM深入学习(2)-算法解析
2015-10-24 20:08
585 查看
前言
在LSD-SLAM深入学习(1)中我们已经完成基本的安装与测试,在此我们继续解析算法与代码,由于lsd-slam本身利用了一部分李群与李代数的知识,需要一定的数学功底。个人理解错误的地方还请不吝赐教,转载请标明出处,内容如有改动更新,请看原博:http://www.cnblogs.com/hitcm/
如有任何问题,feel free to contact me at robotsming@gmail.com
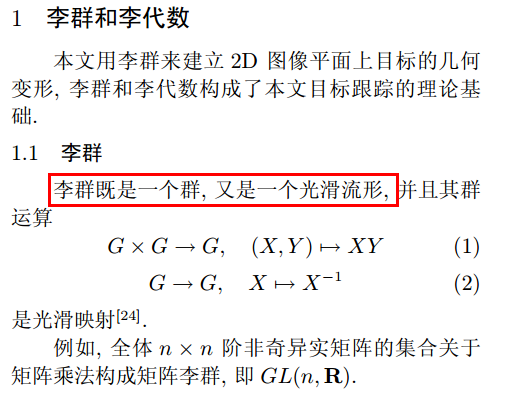
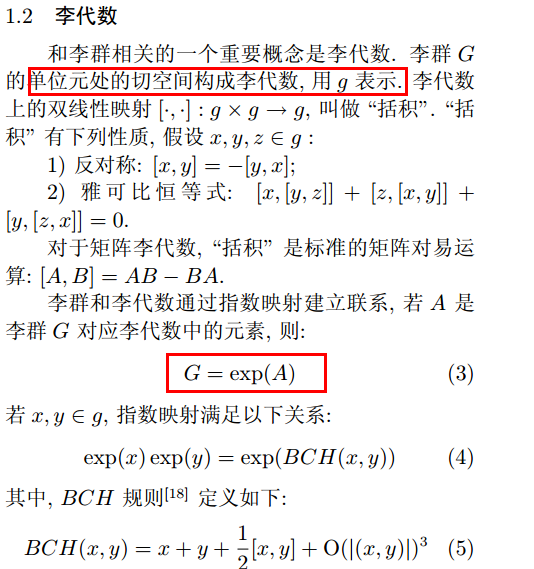
预备知识-李群与李代数
李群与李代数在cv中已经得到了很多的应用了。可以参考文献Applications of Lie groups and Lie algebra to computer vision: A brief survey下面需要形成一个最基础的概念,就是李群与对应的李代数的映射关系。不然很难理解lsd-slam中的一部分内容。
算法的整体框架
如下所示,整个算法分为三部分。
Tracking算法
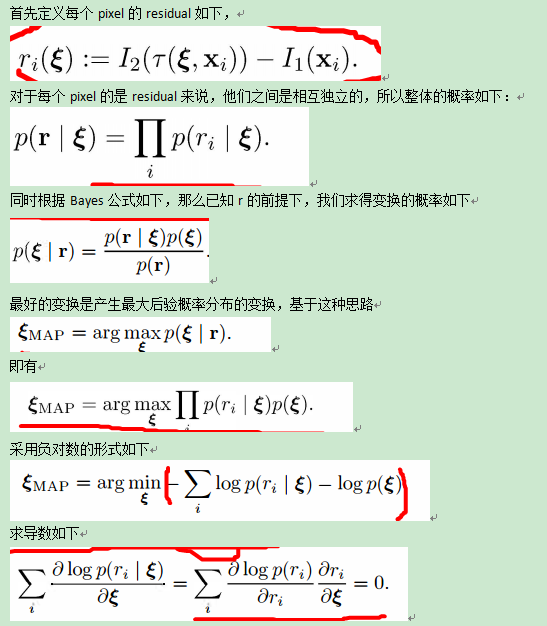
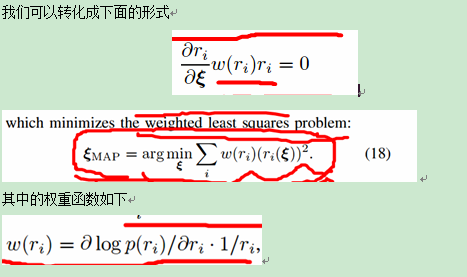
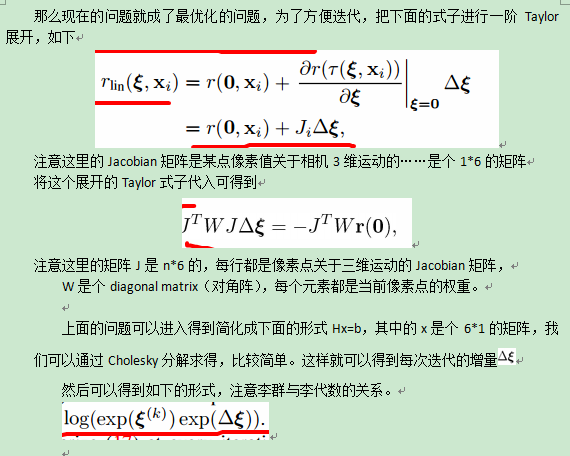
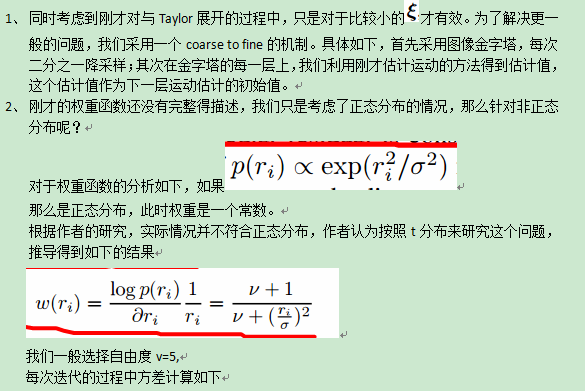
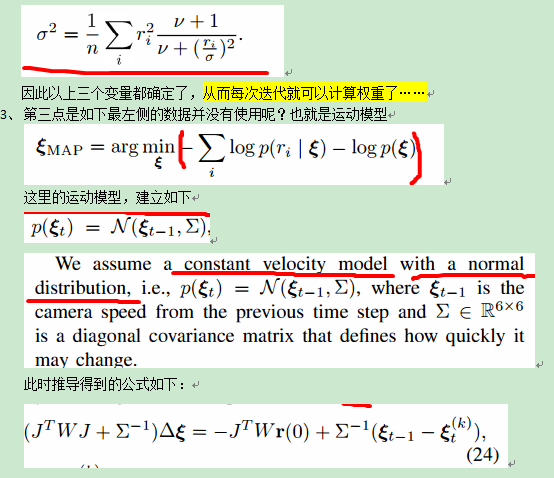
写到这里,有三个问题我们忽略了,下面列举如下
Mapping算法
主要包括三部分的工作,1是当前帧如何refine关键帧的深度信息,2是关键帧之间的深度信息是如何传递的,3是每次迭代过程中都需要的规范化以及异常点的处理。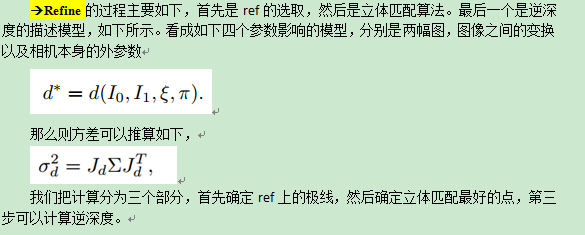

Constraint Acquisition
此处主要解决的是Key之间的变换,是在sim(3)上解决的。Optimization
G2o算法。自行补充。
相关文章推荐
- PHP 7 vs HHVM 比较
- 每天一个linux命令(20):find命令之exec
- Html 语法学习笔记三
- 模板 读入挂
- 【Little_things】控制台五子棋(java)
- 修改MySQL数据库Root密码
- 有人认为“中文编码”是解决中国程序员编程效率的秘密武器,那么它是否是一个“银弹”?
- IDF 牛刀小试- 摩斯密码
- effective c++ 在资源管理类中小心copying 行为
- 第三十三篇:私人通迅录(有存储功能)
- 漂亮的二维透视码
- VC++ 控制外部程序,向外部程序发送一个消息的方法
- servlet生命周期,工作原理,以及
- 灰度图像的自动阈值分割(Otsu 法)
- 灰度图像的自动阈值分割(Otsu 法)
- 线段树求逆序对
- (NO.00001)iOS游戏SpeedBoy Lite成形记(十八)
- Populating Next Right Pointers in Each Node
- 内部类一
- (NO.00001)iOS游戏SpeedBoy Lite成形记(十八)