Tutorial: Using roslaunch to start Gazebo, world files and URDF models
2015-10-03 16:47
615 查看
Tutorial: Using roslaunch to start Gazebo, world files and URDF models
参考:http://gazebosim.org/tutorials?tut=ros_roslaunch&cat=connect_ros
paused Start Gazebo in a paused state (default false)
usesimtime Tells ROS nodes asking for time to get the Gazebo-published simulation time, published over the ROS topic /clock (default true)
gui Launch the user interface window of Gazebo (default true)
headless Disable any function calls to simulator rendering (Ogre) components. Does not work with gui:=true (default false)
debug Start gzserver (Gazebo Server) in debug mode using gdb (default false)
1.2
2.1 建world 文件
建launch文件夹 YOUROBOT.launch
用launch gazebo加载world文件
编辑world文件,可以依据gazebo 进行添加model,
3. Using
3.1 ROS Service Call Spawn Method 推荐
将机器人的描述文件可以分开,利用
keep your robot's location relative to a ROS package path, but also requires you to make a ROS service call using a small (python) script.
使用脚本语句
URDF Example with Baxter
下载Baxter模型包,
参考:http://gazebosim.org/tutorials?tut=ros_roslaunch&cat=connect_ros
1. 使用roslaunch 打开仿真模型
参数:paused Start Gazebo in a paused state (default false)
usesimtime Tells ROS nodes asking for time to get the Gazebo-published simulation time, published over the ROS topic /clock (default true)
gui Launch the user interface window of Gazebo (default true)
headless Disable any function calls to simulator rendering (Ogre) components. Does not work with gui:=true (default false)
debug Start gzserver (Gazebo Server) in debug mode using gdb (default false)
1.1 empty_world.launch
roslaunch gazebo_ros empty_world.launch <arg name="paused" default="false"/> <arg name="use_sim_time" default="true"/> <arg name="extra_gazebo_args" default=""/> <arg name="gui" default="true"/> <arg name="headless" default="false"/> <arg name="debug" default="false"/> <arg name="physics" default="ode"/> <arg name="verbose" default="false"/> <arg name="world_name" default="worlds/empty.world"/>
roslaunch gazebo_ros empty_world.launch paused:=true use_sim_time:=false gui:=true throttled:=false headless:=false debug:=true
1.2 mud_world.launch
继承自emptyworld.launch文件,并将涉及需要的参数进行改变。 ===》word 文件
rosed gazebo_ros mud_world.launch <launch> <!-- We resume the logic in empty_world.launch, changing only the name of the world to be launched --> <include file="$(find gazebo_ros)/launch/empty_world.launch"> <arg name="world_name" value="worlds/mud.world"/> <!-- Note: the world_name is with respect to GAZEBO_RESOURCE_PATH environmental variable --> <arg name="paused" value="false"/> <arg name="use_sim_time" value="true"/> <arg name="gui" value="true"/> <arg name="headless" value="false"/> <arg name="debug" value="false"/> </include> </launch>
1.3 World Files
先找三个gazebo的模型,先从本地gazebo模型库中找,路径在.gazebo/models ,找不到再从网络在线库(需要链接到goole,这已经被墙了)<sdf version="1.4"> <world name="default"> <include> <uri>model://sun</uri> </include> <include> <uri>model://ground_plane</uri> </include> <include> <uri>model://double_pendulum_with_base</uri> <name>pendulum_thick_mud</name> <pose>-2.0 0 0 0 0 0</pose> </include> ... </world> </sdf>
2. Creating your own Gazebo ROS Package
文件夹/MYROBOT_description机器人模型与描述文件
/MYROBOT_gazeboworld文件与launch文件
../catkin_ws/src 文件夹结构 /MYROBOT_description package.xml CMakeLists.txt /urdf MYROBOT.urdf /meshes mesh1.dae mesh2.dae ... /materials /cad /MYROBOT_gazebo /launch MYROBOT.launch /worlds MYROBOT.world /models world_object1.dae world_object2.stl world_object3.urdf /materials /plugins
2.1 建world 文件
建launch文件夹 YOUROBOT.launch
<launch> <!-- We resume the logic in empty_world.launch, changing only the name of the world to be launched --> <include file="$(find gazebo_ros)/launch/empty_world.launch"> <arg name="world_name" value="$(find MYROBOT_gazebo)/worlds/MYROBOT.world"/> <!-- more default parameters can be changed here --> </include> </launch>建 world文件夹 MYROBOT.world
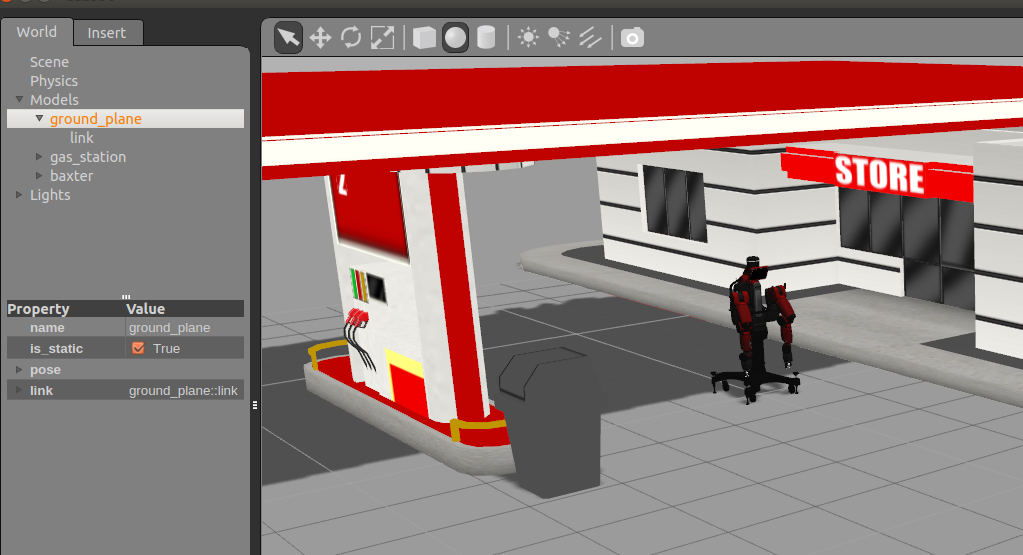
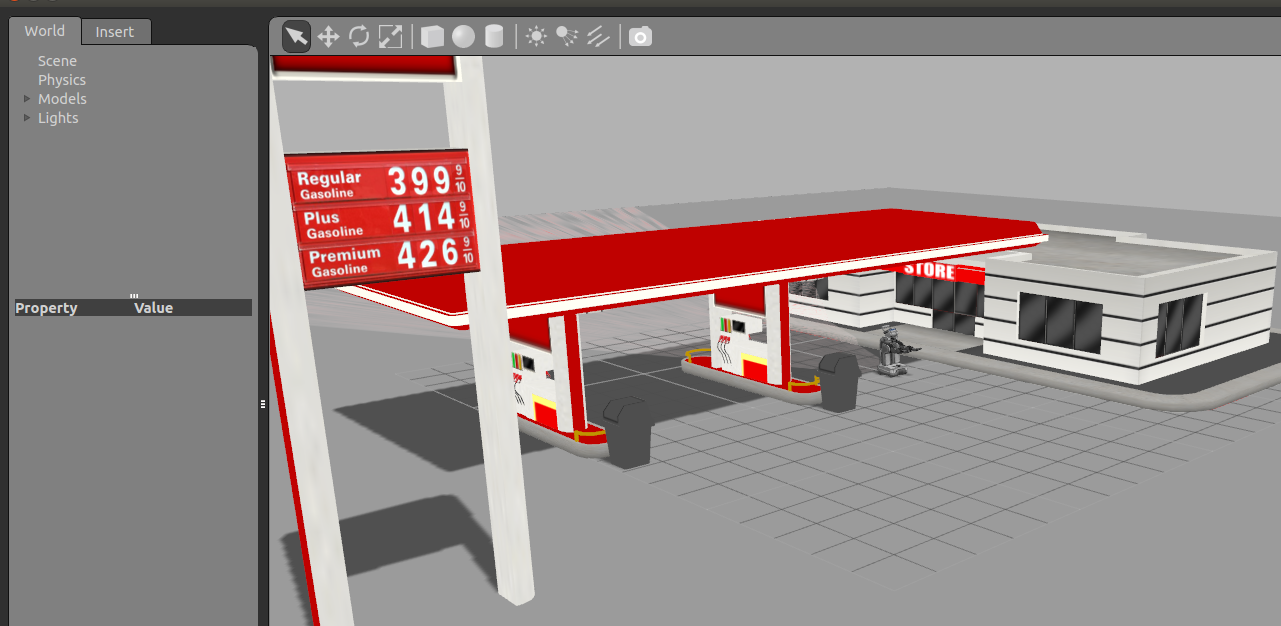
<?xml version="1.0" ?> <sdf version="1.4"> <world name="default"> <include> <uri>model://ground_plane</uri> </include> <include> <uri>model://sun</uri> </include> <include> <uri>model://gas_station</uri> <name>gas_station</name> <pose>-2.0 7.0 0 0 0 0</pose> </include> </world> </sdf>
用launch gazebo加载world文件
roslaunch MYROBOT_gazebo MYROBOT.launch
编辑world文件,可以依据gazebo 进行添加model,
File->Save保存即可.
3. Using roslaunch
to Spawn URDF Robots
3.1 ROS Service Call Spawn Method 推荐
将机器人的描述文件可以分开,利用 spawn_model脚本在相应包里调用就可以。 简化了包的存储结构。
keep your robot's location relative to a ROS package path, but also requires you to make a ROS service call using a small (python) script.
使用脚本语句
spawn_model调用节点gazebo_ros的服务回调加载URDF文件到gazebo中,相应参数。
URDF Example with Baxter
下载Baxter模型包,
git clone https://github.com/RethinkRobotics/baxter_common.git[/code]运行 gazebo_ros 与 脚本spawn_model 加载机器人。rosrun gazebo_ros spawn_model -file `rospack find MYROBOT_description`/urdf/MYROBOT.urdf -urdf -x 0 -y 0 -z 1 -model MYROBOT
This method uses a small python script calledspawn_modelto makea service call request to thegazebo_rosROS node(named simply "gazebo" in the rostopic namespace) to add a custom URDF into Gazebo.Thespawn_model
script is located within thegazebo_rospackage.You can use this script in the following way:rosrun gazebo_ros spawn_model -file `rospack find MYROBOT_description`/urdf/MYROBOT.urdf -urdf -x 0 -y 0 -z 1 -model MYROBOT
[/code]
To see all of the available arguments forspawn_modelincluding namespaces, trimesh properties, joint positions and RPY orientation run:rosrun gazebo_ros spawn_model -h----------也可以放到launch文件里,与world一起加载。
XACRO Example with PR2URDF is not in XML format but rather in XACRO format, XACRO格式的urdf文件。<!-- Spawn a robot into Gazebo --> <node name="spawn_urdf" pkg="gazebo_ros" type="spawn_model" args="-file $(find baxter_description)/urdf/baxter.urdf -urdf -z 1 -model baxter" />sudo apt-get install ros-indigo-pr2-common
在launch里面加载机器人描述<!-- Convert an xacro and put on parameter server --> <param name="robot_description" command="$(find xacro)/xacro.py $(find pr2_description)/robots/pr2.urdf.xacro" /> <!-- Spawn a robot into Gazebo --> <node name="spawn_urdf" pkg="gazebo_ros" type="spawn_model" args="-param robot_description -urdf -model pr2" />3.2 Model Database Method
自己 建gazebo 模型../catkin_ws/src /MYROBOT_description package.xml CMakeLists.txt model.config /urdf MYROBOT.urdf /meshes mesh1.dae mesh2.dae ... /materials /plugins /cad
/home/user/catkin_workspace/src - this is treated as the location of a Gazebo Model Database
/MYROBOT_description - this directory is treated as a single Gazebo model folder 模型文件夹
model.config - this is a required configuration file for Gazebo to find this model in its database 配置描述性信息
MYROBOT.urdf - this is your robot description file, also used by Rviz, MoveIt!, etc
/meshes - put your .stl or .dae files in here, just as you would with regular URDFsEnvironment Variable -tells Gazebo where to look for model databases
export GAZEBO_MODEL_PATH=/home/user/catkin_ws/src/
Next Steps
Now that you know how to createroslaunchfiles that open Gazebo, world files and URDF models, you are now ready to create your own Gazebo-ready URDF model in the tutorialUsing
A URDF In Gazebo

相关文章推荐
- codeforces 180C C. Letter(dp)
- VS中的快捷键须知!
- 软件开发V型号
- 第14章 探索虚拟内存(2)
- Spring 创建bean的时机
- 6
- 单例模式之读取配置文件
- 旅行商简化版
- Android存储小结
- 网站字体影印代码!
- 安卓动态控制RelativeLayout的组件
- HDU3996 Gold Mine(最大权闭合子图)
- leetcode - Product of Array Except Self
- Spring 研究spring创建对象的方式
- C++运算符重载
- NSUserDefaults读取和写入自定义对象
- 硅藻泥行业失控真相后续 网友呼吁主管部门彻查
- codeforces 466C Civilization 并查集+dfs
- 迎春舞会之三人组舞 --dp
- JAVA实现包含main函数的栈问题(《剑指offer》)