mpu6050卡尔曼滤波程序及分析
2015-09-24 18:04
417 查看
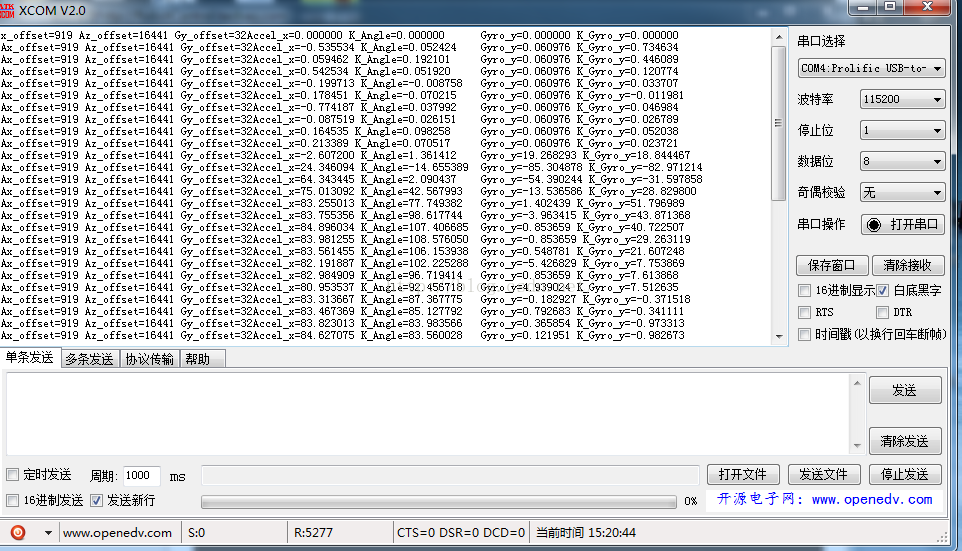
最近在学习卡尔曼滤波算法,算法 首先静止传感器,先测量100次,求平均值,求出偏差Ax_offset Az_offset Gz_offset.以后每次测量值 都减去这一偏差。然后通过加速度测得的Ax,Az通过 atant(Ax,Az)计算Accel_x 即是Roll,K_Angle 是klman以后的Roll,Gyro_y为陀螺仪Y轴加速度,K_Gyro_y为卡尔曼之后的数值,
klman是融合Accel_x 和Gyro_y,得到的结果。
下图为串口发上来的数据分析。
u
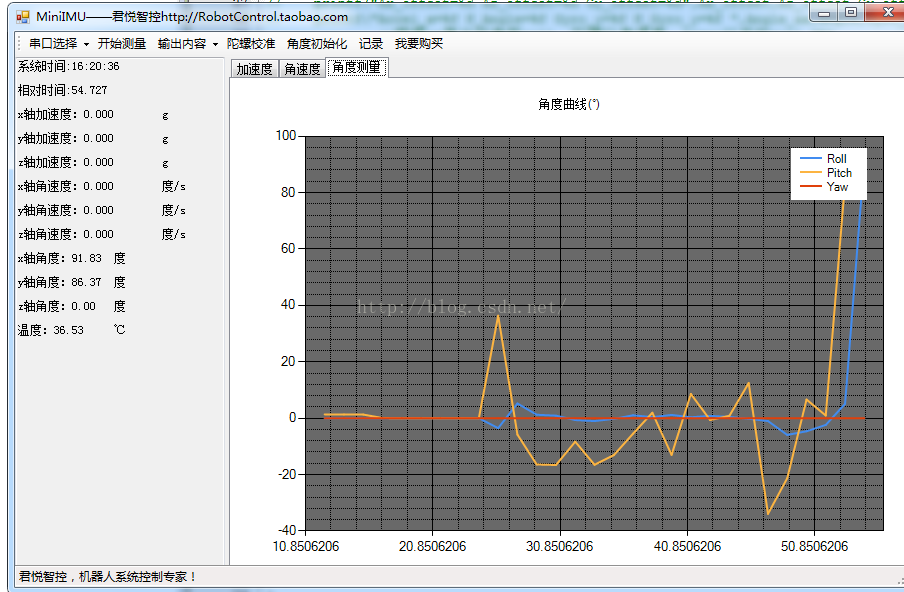
下图为使用一个软件得出的 Roll为klman以后的角度,Pinch为原始角度。可以看出klman对震动表现较好。但是效果并不是很明显。
klman是融合Accel_x 和Gyro_y,得到的结果。
下图为串口发上来的数据分析。
u
下图为使用一个软件得出的 Roll为klman以后的角度,Pinch为原始角度。可以看出klman对震动表现较好。但是效果并不是很明显。

相关文章推荐
- Keil STM32工程环境搭建
- stm32之RTC
- STM32串口操作相关事项
- 【eBox生态圈】连载一:简化STM32的编程之eBox生态圈
- STM32 SPI工作在主模式时用DMA方式接收数据
- STM32 配置定时器让引脚输出PWM波形
- [嵌入式裸机课程]Cortex-M3开发实训班
- stm32的1602操作显示
- STM32 UART DMA实现未知数据长度接收(转自amoBBs)
- STM32F429 LTDC学习笔记1
- stm32学习笔记---入门环境搭建及开发板的选用
- stm32f407使用OV7725使用迭代阈值法进行图像二值化,图像分割
- stm32中断服务函数的机制
- pc寄存器与可寻址空间
- 关于STM32 库函数3.5版的各种坑
- STM32 Printf函数实现方法 (转载)
- STM32 IAP
- 红龙103开发板CAN IAP
- STM32的时钟基础知识
- STM32使用16M外部晶振时出现异常