本质矩阵和基础矩阵的区别是什么
2015-09-09 14:28
549 查看
先了解下对极几何,两个相机在不同位置(实际要求光心位置不同即可)拍摄两张图,这个模型就是对极几何,如下图(摘自《计算机视觉中的多视图几何》):
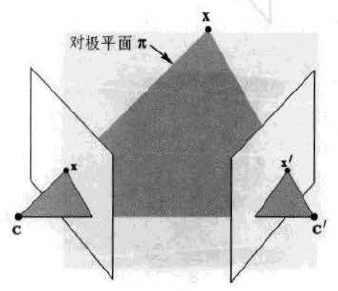
两摄像机光心分别是C和C',图像平面是两白色的平面,空间中某一个点X在两张图的投影点分别是x和x'。这样的模型就是对极几何,空间点和两光心组成的平面叫做对极面。简言之,不同视点拍摄的两个场景满足对极几何关系。
再讲下基本矩阵,存在这么一个矩阵F,使得空间中不在两图像平面上的任意点X分别在两图像的投影坐标x,x'满足等式(x')T*F*x=0,即x'的转置乘以F,再乘以x的结果为0,那么F就是左边图像到右边图像的基本矩阵,从公式上可以看出基本矩阵是有方向的,右图到左图的基本矩阵就是F的转置。F矩阵有如下性质:
1、秩为2;
2、F矩阵是一个7个自由度的3*3矩阵(3*3矩阵本身9个自由度,因为相差一个常数因子和行列式值为0两个条件,减掉2个自由度),相差一个常数因此的意思是:kF(k!=0)也是基本矩阵,也就是说如果F是基本矩阵,那么kF也是基本矩阵,所以基本矩阵不唯一,在相差一个倍数的前提下是唯一的,也就是我们可以固定矩阵中某一个非零元素的值,这样自然少一个自由度。
这里讲下自己对基本矩阵的理解:很简单,基本矩阵提供了三维点到二维的一个约束条件。举个例子,现在假设我们不知道空间点X的位置,只知道X在左边图上的投影x的坐标位置,也知道基本矩阵,首先我们知道的是X一定在射线Cx上,到底在哪一点是没法知道的,也就是X可能是Cx上的任意一点(也就是轨迹的意思),那么X在右图上的投影肯定也是一条直线。也就是说,如果我们知道一幅图像中的某一点和两幅图的基本矩阵,那么就能知道其对应的右图上的点一定是在一条直线上,这样就约束了两视角下的图像中的空间位置一定是有约束的,不是任意的。基本矩阵是很有用的一个工具,在三维重建和特征匹配上都可以用到。
最后带下本质矩阵,本质矩阵就是在归一化图像坐标下的基本矩阵。不仅具有基本矩阵的所有性质,而且还可以估计两相机的相对位置关系,具体内容可参考《计算机视觉中的多视图几何》。
reference:
http://www.zhihu.com/question/27581884 http://www.360doc.com/content/14/0205/15/10724725_349965748.shtml http://www.cse.psu.edu/~rtc12/CSE486/lecture19.pdf http://wenku.baidu.com/link?url=dVGGWlz3GSQ9L8DuEk35ZqIORyQ3deCB2BImlGgC_ZVK4L0rFjAeqarmi08L-1yq0GQKcyr5kwa_H2U58L4zeMz7bgStnQdcOm-db3ci1rC http://www.docin.com/p-610272276.html
两摄像机光心分别是C和C',图像平面是两白色的平面,空间中某一个点X在两张图的投影点分别是x和x'。这样的模型就是对极几何,空间点和两光心组成的平面叫做对极面。简言之,不同视点拍摄的两个场景满足对极几何关系。
再讲下基本矩阵,存在这么一个矩阵F,使得空间中不在两图像平面上的任意点X分别在两图像的投影坐标x,x'满足等式(x')T*F*x=0,即x'的转置乘以F,再乘以x的结果为0,那么F就是左边图像到右边图像的基本矩阵,从公式上可以看出基本矩阵是有方向的,右图到左图的基本矩阵就是F的转置。F矩阵有如下性质:
1、秩为2;
2、F矩阵是一个7个自由度的3*3矩阵(3*3矩阵本身9个自由度,因为相差一个常数因子和行列式值为0两个条件,减掉2个自由度),相差一个常数因此的意思是:kF(k!=0)也是基本矩阵,也就是说如果F是基本矩阵,那么kF也是基本矩阵,所以基本矩阵不唯一,在相差一个倍数的前提下是唯一的,也就是我们可以固定矩阵中某一个非零元素的值,这样自然少一个自由度。
这里讲下自己对基本矩阵的理解:很简单,基本矩阵提供了三维点到二维的一个约束条件。举个例子,现在假设我们不知道空间点X的位置,只知道X在左边图上的投影x的坐标位置,也知道基本矩阵,首先我们知道的是X一定在射线Cx上,到底在哪一点是没法知道的,也就是X可能是Cx上的任意一点(也就是轨迹的意思),那么X在右图上的投影肯定也是一条直线。也就是说,如果我们知道一幅图像中的某一点和两幅图的基本矩阵,那么就能知道其对应的右图上的点一定是在一条直线上,这样就约束了两视角下的图像中的空间位置一定是有约束的,不是任意的。基本矩阵是很有用的一个工具,在三维重建和特征匹配上都可以用到。
最后带下本质矩阵,本质矩阵就是在归一化图像坐标下的基本矩阵。不仅具有基本矩阵的所有性质,而且还可以估计两相机的相对位置关系,具体内容可参考《计算机视觉中的多视图几何》。
reference:
http://www.zhihu.com/question/27581884 http://www.360doc.com/content/14/0205/15/10724725_349965748.shtml http://www.cse.psu.edu/~rtc12/CSE486/lecture19.pdf http://wenku.baidu.com/link?url=dVGGWlz3GSQ9L8DuEk35ZqIORyQ3deCB2BImlGgC_ZVK4L0rFjAeqarmi08L-1yq0GQKcyr5kwa_H2U58L4zeMz7bgStnQdcOm-db3ci1rC http://www.docin.com/p-610272276.html

相关文章推荐
- 拍照并显示以及获取路径后上传
- Mysql 5.5 修改max_allowed_packet参数
- QQ互联不能使用的通用解决方法
- 阿里巴巴已拿下中国互联网半壁江山
- 编写一个服务端可以给多个客户端发送图片
- asp.net文件上传带进度条实现案例(多种风格)
- 开发者经验谈:如何一天时间搞定iOS游戏开发?
- 开发者经验谈:如何一天时间搞定iOS游戏开发?
- 开发者经验谈:如何一天时间搞定iOS游戏开发?
- 开发者经验谈:如何一天时间搞定iOS游戏开发?
- 开发者经验谈:如何一天时间搞定iOS游戏开发?
- 关于企业投资所得是否需要再交所得税的问题
- 注释笔记
- java图形界面gui
- 开发者经验谈:如何一天时间搞定iOS游戏开发?
- 今年Chinajoy除了showgirl看什么
- oracle设备
- django.core.exceptions.ImproperlyConfigured:
- [WEB前端开发]-VM中的POST请求-解决页面向control层传参的问题
- C++——运算符重载(三)