张正友标定算法理论及算法实现
2015-08-13 20:55
645 查看
张正友标定算法理论及算法实现

设三维世界中坐标的点为:
和二维相机平面坐标的点为:


为方便运算,模板被定义在世界坐标系中与X-y平面平行(即Z=0)的平面上,


为模板平面上点的齐次坐标,

为模板平面上点投影到图像平面上对应点的齐次坐标。

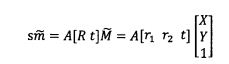
为相机内参矩阵。旋转和平移矩阵记为分别为R、t,缩放因子标量记为s。
根据旋转矩阵的性质

,对于每副图像,可以得到约束条件:
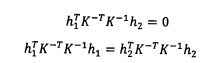
(a)
根据矩阵知识,当所取图像数目大于等于3时含有5个未知的内参数的矩阵A可以被唯一求解。
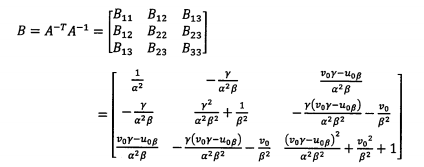
B矩阵是个对称矩阵,所以可以写成一个六维向量形式:

(b)
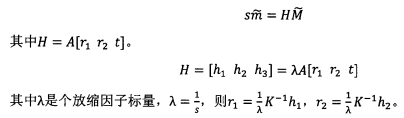
我们把H矩阵的列向量形式为:
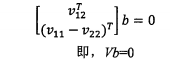
式(b)改写成:

最后根据内参数的限制条件式(a):
矩阵V是2x6矩阵,即每张照片可以建立两个方程组,包含六个未知数。根据线性代数知识可知,要求解所有未知数至少需要六个方程组,因此这样至少需要三张照片才能解出所有未知数。b解出后就可以解出相机内参矩阵A,然后解得每张图像的外部参数R、t:
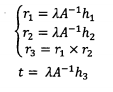
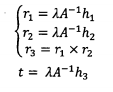
其中

当初始参数已经解出后,每张图像的控制点根据求解的参数再还原回出三维世界坐标,再通过建立非线性最小化模型优化解得值与真实值的差异,也即:

利用这个模型结合LM优化算法,就可以得到最优化的参数。
(2)径向畸变的处理
这个模型建立到此还为考虑过镜头的畸变问题,但一般情况下的相机都会存在一定程度的径向畸。这里我们只考虑二次畸变。
设(u , v)为理想的像素坐标,

为实际的像素坐标。对应地,(x, y)和

为理想和实际的图像坐标。于是有:

其中k1与k2为径向畸变系数。对于中心点畸变同样适用。然后由

和

我们得到下式:

已知,n副图的m个点,通过最小二乘法求解这个线性方程组的解。一旦k1、k2得到后,就可以利用上式替代通过处理式极大似然公式中的

来优化其他参数。通过反复替换这两个过程,直到满意为止。
除此之外,求解出的畸变系数还可以通过极大似然估计来优化,其公式为:


具体流程是:
1)把被取的十个点的世界坐标(齐次坐标)进行转置。
2)对单应性矩阵求解并优化。
3)把六幅图的单应矩阵求解出来后求解出6向量(B矩阵)。因为每个单应矩阵可以得到两个方程,通过循环对矩阵y赋值后,再对y进行正交分解即可得到6向量。进而得到相机的内参矩阵。
4)先求解出相机的外参,然后对畸变系数进行求解,得到相机坐标(Xc, Yc, Zc)。
5)调用函数对内参和畸变系数进行优化,并显示优化后的结果。然后根据优化后的结果求解外参矩阵。
6)从旋转矩阵中分解出独立变量(三个坐标的转角),再得到平移矩阵,最后把它们和内参、畸变系数一起优化进行最终优化。
******************
作者:hao_09
时间:2015/8/13
文章地址:http://blog.csdn.net/lsh_2013/article/details/47617909
******************
理论基础
1999年,微软研究院的张正友提出了基于移动平面模板的相机标定方法。此方法是介于传统标定方法和自标定方法之间的一种方法,传统标定方法虽然精度高设备有较高的要求,其操作过程也比较繁琐,自标定方法的精度不高,张正友标定算法克服了这两者的缺点同时又兼备二者的优点,因此对办公、家庭的场合使用的桌面视觉系统(DVS)很适合。设三维世界中坐标的点为:
和二维相机平面坐标的点为:
为方便运算,模板被定义在世界坐标系中与X-y平面平行(即Z=0)的平面上,
为模板平面上点的齐次坐标,
为模板平面上点投影到图像平面上对应点的齐次坐标。
为相机内参矩阵。旋转和平移矩阵记为分别为R、t,缩放因子标量记为s。
根据旋转矩阵的性质
,对于每副图像,可以得到约束条件:
(a)
根据矩阵知识,当所取图像数目大于等于3时含有5个未知的内参数的矩阵A可以被唯一求解。
B矩阵是个对称矩阵,所以可以写成一个六维向量形式:
(b)
我们把H矩阵的列向量形式为:
式(b)改写成:
最后根据内参数的限制条件式(a):
矩阵V是2x6矩阵,即每张照片可以建立两个方程组,包含六个未知数。根据线性代数知识可知,要求解所有未知数至少需要六个方程组,因此这样至少需要三张照片才能解出所有未知数。b解出后就可以解出相机内参矩阵A,然后解得每张图像的外部参数R、t:
其中
极大似然估计与径向畸变处理
(1)极大似然估计当初始参数已经解出后,每张图像的控制点根据求解的参数再还原回出三维世界坐标,再通过建立非线性最小化模型优化解得值与真实值的差异,也即:
利用这个模型结合LM优化算法,就可以得到最优化的参数。
(2)径向畸变的处理
这个模型建立到此还为考虑过镜头的畸变问题,但一般情况下的相机都会存在一定程度的径向畸。这里我们只考虑二次畸变。
设(u , v)为理想的像素坐标,
为实际的像素坐标。对应地,(x, y)和
为理想和实际的图像坐标。于是有:
其中k1与k2为径向畸变系数。对于中心点畸变同样适用。然后由
和
我们得到下式:
已知,n副图的m个点,通过最小二乘法求解这个线性方程组的解。一旦k1、k2得到后,就可以利用上式替代通过处理式极大似然公式中的
来优化其他参数。通过反复替换这两个过程,直到满意为止。
除此之外,求解出的畸变系数还可以通过极大似然估计来优化,其公式为:
张正友标定算法的实现
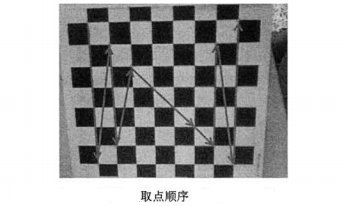
首先,对于张正友算法的标定点选取,一般是选择能均匀分布于整个图像的一些点。对于相机的标定精度而言,选取的点越多,反应图像的信息越完整,因而得到的结果越好。但是随着点数的增加,其运算量增加,同时增加点数带来精度提高的效果随着点数增加而逐渐减弱。因此,通常情况下张正友算法选取均匀分布于图像上的十个点。本次试验中共取用了同一摄像机从不同角度拍摄的六幅图像,从每幅图像中取十个特征点来进行摄像机标定(这十个点的世界坐标相同)。图中显示了这六幅图,每幅图的大小为384×512。具体流程是:
1)把被取的十个点的世界坐标(齐次坐标)进行转置。
2)对单应性矩阵求解并优化。
3)把六幅图的单应矩阵求解出来后求解出6向量(B矩阵)。因为每个单应矩阵可以得到两个方程,通过循环对矩阵y赋值后,再对y进行正交分解即可得到6向量。进而得到相机的内参矩阵。
4)先求解出相机的外参,然后对畸变系数进行求解,得到相机坐标(Xc, Yc, Zc)。
5)调用函数对内参和畸变系数进行优化,并显示优化后的结果。然后根据优化后的结果求解外参矩阵。
6)从旋转矩阵中分解出独立变量(三个坐标的转角),再得到平移矩阵,最后把它们和内参、畸变系数一起优化进行最终优化。
******************
作者:hao_09
时间:2015/8/13
文章地址:http://blog.csdn.net/lsh_2013/article/details/47617909
******************

相关文章推荐
- 平行双目视觉标定
- 大幅面多相机高精度定位及测量解决方案
- 读书计划与交流的期望
- 在机器视觉领域中为何选择基于瑞芯微Rockchip PX2主控芯片?
- Halcon学习之四:有关图像生成的函数
- Halcon学习之二:摄像头获取图像和相关参数
- Halcon学习之五:有关图像的定义域的函数
- Halcon学习之七:改变图像的现实方式和大小
- 分享一些OpenCV实现立体视觉的经验
- 在OpenCV中用cvCalibrateCamera2进行相机标定
- 机器人demo
- 机器视觉系统硬件部分
- 机器视觉的一些链接
- 本人常用资源整理(ing...)
- 图像处理与计算机视觉:基础,经典以及最近发展
- 工业相机和数码相机的六大区别
- 如何选择工业相机?听听专家怎么说
- 远心工业镜头与普通工业镜头的区别
- 为您解忧 机器视觉之光学基础知识问答
- 光源、照明方法、相机与镜头配套原则、PPI