【练习8.7】cvGoodFeaturesToTrack确定图像强角点、cvFindCornerSubPix亚像素级角点检测
2015-05-20 21:18
621 查看
| 题目要求 | 程序代码 | 结果图片 | 要言妙道 | 借鉴参考 |
黑色背景上创建一个白色拐角,使得这个角正好在整数值的坐标上,保存用OpenCV打开
a、找出并输出拐角的确切坐标
分别改变原始图像进行如下操作
b、用白边透明填充的圆将圆角遮住
c、用白边黑色填充的圆将圆角遮住
d、用黑色圆块将圆角遮住
程序代码:
// OpenCVExerciseTesting.cpp : 定义控制台应用程序的入口点。
//
// string file_full_name = "D:\\Work\\Work_Programming\\Source\\Image\\OpenCVExerciseImage\\第8章\\r20.jpg";
#include "stdafx.h"
#include<string>
#include <cv.h>
#include <highgui.h>
#include <iostream>
#include<math.h>
#include <opencv2/legacy/legacy.hpp>
//#pragma comment(lib, "opencv_legacy2411.lib")
using namespace cv;
using namespace std;
//函数声明-->--->-->--->-->--->-->--->//
//<--<--<--<--<--<--<--<--<--函数声明//
int _tmain(int argc, _TCHAR* argv[])
{
string file_full_name = "D:\\Work\\Work_Programming\\Source\\Image\\OpenCVExerciseImage\\第8章\\拐角.jpg";
IplImage * image_source = cvLoadImage(file_full_name.c_str(), CV_LOAD_IMAGE_GRAYSCALE);
CV_Assert(image_source);
string file_full_name_2 = "D:\\Work\\Work_Programming\\Source\\Image\\OpenCVExerciseImage\\第8章\\拐角2.jpg";
IplImage * image_source_2 = cvLoadImage(file_full_name_2.c_str(), CV_LOAD_IMAGE_GRAYSCALE);
CV_Assert(image_source_2);
IplImage * images[2] = { image_source, image_source_2 };
string window_name = "角度图像";
for (int i = 0; i < 2; ++i)
{
window_name = window_name + "。";
IplImage * image_gray = cvCloneImage(images[i]);
IplImage * image_eig = cvCreateImage(cvGetSize(images[i]), IPL_DEPTH_32F, 1);
cvZero(image_eig);
IplImage* image_temp = cvCloneImage(image_eig);
int corner_count = 5;
CvPoint2D32f *corners = new CvPoint2D32f[corner_count];
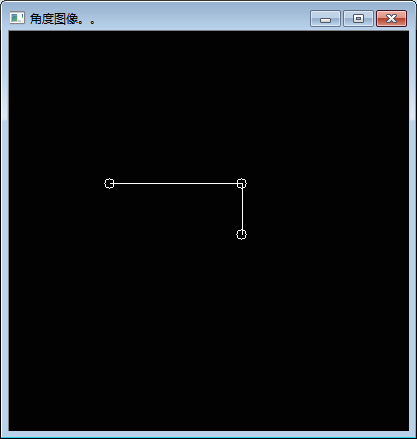
cvGoodFeaturesToTrack(image_gray, image_eig, image_temp, corners, &corner_count, 0.1, 10);
IplImage * image_corner = cvCloneImage(image_gray);
//cvZero(image_corner);
cout << "cvGoodFeaturesToTrack:" << endl;
for (int i = 0; i < corner_count; ++i)
{
cout << corners[i].x << " " << corners[i].y << endl;
cvDrawCircle(image_corner, cvPoint(corners[i].x, corners[i].y), 5, cvScalar(255));
}
cvNamedWindow(window_name.c_str(), CV_WINDOW_AUTOSIZE);
cvShowImage(window_name.c_str(), image_corner);
int half_win_size = 3;//the window size will be 3+1+3=7
int iteration = 20;
double epislon = 0.1;
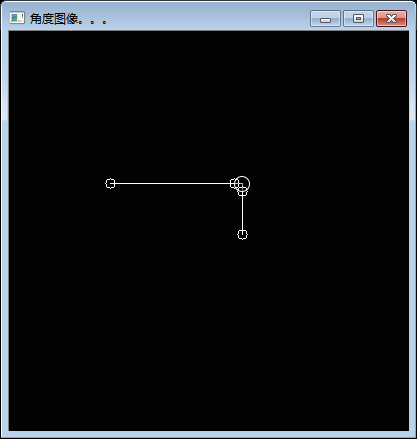
cvFindCornerSubPix(image_gray, corners, corner_count
, cvSize(half_win_size, half_win_size), cvSize(-1, -1)
, cvTermCriteria(CV_TERMCRIT_ITER | CV_TERMCRIT_EPS, iteration, epislon));
IplImage * image_subPix = cvCloneImage(image_gray);
cout << "cvFindCornerSubPix:" << endl;
for (int i = 0; i < corner_count; ++i)
{
cout << corners[i].x << " " << corners[i].y << endl;
cvDrawCircle(image_subPix, cvPoint(corners[i].x, corners[i].y), 5, cvScalar(255));
}
window_name = window_name + "。";
cvShowImage(window_name.c_str(), image_subPix);
cvReleaseImage(&image_gray);
cvReleaseImage(&image_eig);
cvReleaseImage(&image_temp);
cvReleaseImage(&image_corner);
cvReleaseImage(&image_subPix);
}
cvWaitKey(0);
cvReleaseImage(&image_source);
cvReleaseImage(&image_source_2);
cvDestroyAllWindows();
return 0;
}结果图片:
 | |
 |  |
 | |
 |  |
 |  |
 |  |
 |  |
借鉴参考:

相关文章推荐
- 【OpenCV3】角点检测——cv::goodFeaturesToTrack()与cv::cornerSubPix()详解
- Corner Detection Using cvGoodFeaturesToTrack
- Leaning OpenCV:Corner Detection Using cvGoodFeaturesToTrack
- Leaning OpenCV:Corner Detection Using cvGoodFeaturesToTrack
- cvGoodFeaturesToTrack()设置ROI的问题
- 角点检测cvFindCornerSubPix和cvGoodFeaturesToTrack
- cvGoodFeaturesToTrack和(CV::Mat 下的goodFeaturesToTrack)
- 图像处理特征不变算子系列之KLT算子--GoodFeaturesToTrack(七)
- 图像处理特征不变算子系列之KLT算子--GoodFeaturesToTrack
- OpenCV_Corner Detect with Harris and goodFeaturesToTrack( 基于Harris及适合跟踪的优质特征的角点检测)
- 第十章 跟踪与运动 opecv cvGoodFeaturesToTrack
- 图像处理特征不变算子系列之KLT算子--GoodFeaturesToTrack(七)
- [learning opencv]第十章cvGoodFeaturesToTrack的demo
- cvGoodFeaturesToTrack()与goodFeaturesToTrack()进行harris角点检测
- opencv例程之cvGoodFeaturesToTrack
- OpenCv目标跟踪_cvGoodFeaturesToTrack()寻找角点
- opencv3_java 图像的角点检测DetectConers goodFeaturesToTrack
- cvGoodFeaturesToTrack
- python里使用cv2.goodFeaturesToTrack()函数追踪图像里的关键点
- 图像处理特征不变算子系列之KLT算子--GoodFeaturesToTrack(七)