基于形状的模板匹配
2015-03-25 21:06
260 查看
前段时间一直在做图像模板匹配。需要对旋转模板进行匹配,并且对速度精度都有较高的要求。OpenCV里面并没有较好的解决方法。
OpenCV形状匹配函数
以上函数匹配精度也不高,只能达到像素级。
特征点匹配如Sift算法等需要图像质量较好,噪声大的图像不适应,而且找到特征点之间一一对应关系是难点。
halcon等商业软件这方面做的很好。halcon基于形状的匹配Shape-Based matching能完美解决工业条件下的模板匹配问题。
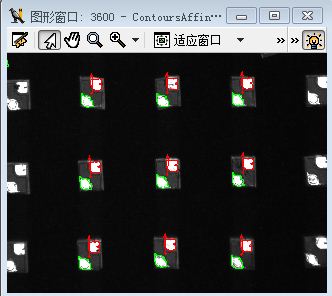
HALCON提供的基于形状匹配的算法主要是针对感兴趣的小区域来建立模板,对整个图像建立模板也可以,但这样除非是对象在整个图像中所占比例很大,比如像视频会议中人 体上半身这样的图像,我在后面的视频对象跟踪实验中就是针对整个图像的,这往往也是要牺牲匹配速度的。基本流程是这样的:
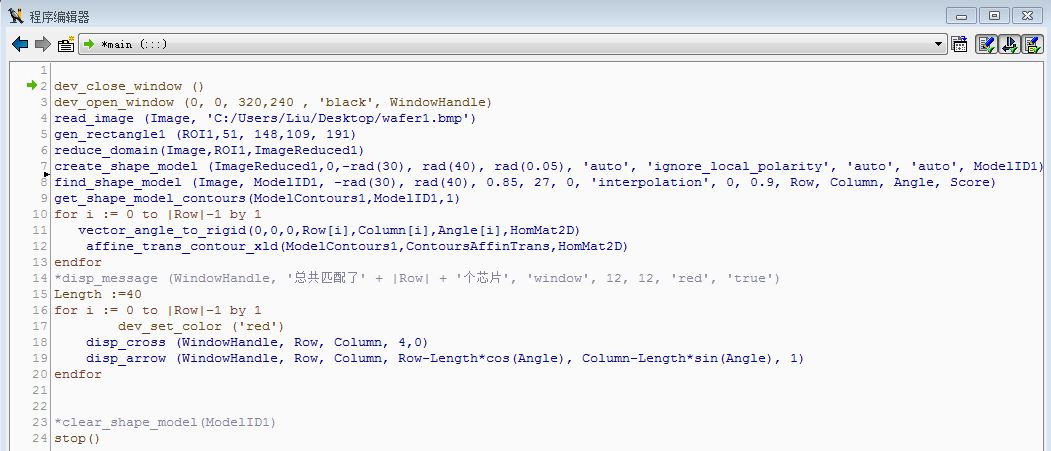
⑴ 首先确定出ROI的矩形区域,这里只需要确定矩形的左上点和右下点的坐标即可,gen_rectangle1()这个函数就会帮助你生成一个矩形,利用area_center()找到这个矩形的中心;
⑵ 然后需要从图像中获取这个矩形区域的图像,reduce_domain()会得到这个ROI;这之后就可以对这个矩形建立模板,而在建立模板之前,可以先对这个区域进行一些处理,方便以后的建模,比如阈值分割,数学形态学的一些处理等等;
⑶ 接下来就可以利用create_shape_model()来创建模板了,这个函数有许多参数,其中金字塔的级数由Numlevels指定,值越大则找到物体的时间越少,AngleStart和AngleExtent决定可能的旋转范围,AngleStep指定角度范围搜索的步长;这里需要提醒的是,在任何情况下,模板应适合主内存,搜索时间会缩短。对特别大的模板,用Optimization来减少模板点的数量是很有用的;MinConstrast将模板从图像的噪声中分离出来,如果灰度值的波动范围是10,则MinConstrast应当设为10;Metric参数决定模板识别的条件,如果设为’use_polarity’,则图像中的物体和模板必须有相同的对比度;创建好模板后,这时还需要监视模板,用inspect_shape_model()来完成,它检查参数的适用性,还能帮助找到合适的参数;另外,还需要获得这个模板的轮廓,用于后面的匹配,get_shape_model_contours()则会很容易的帮我们找到模板的轮廓;
⑷ 创建好模板后,就可以打开另一幅图像,来进行模板匹配了。这个过程也就是在新图像中寻找与模板匹配的图像部分,这部分的工作就由函数find_shape_model()来承担了,它也拥有许多的参数,这些参数都影响着寻找模板的速度和精度。这个的功能就是在一幅图中找出最佳匹配的模板,返回一个模板实例的长、宽和旋转角度。其中参数SubPixel决定是否精确到亚像素级,设为’interpolation’,则会精确到,这个模式不会占用太多时间,若需要更精确,则可设为’least_square’,’lease_square_high’,但这样会增加额外的时间,因此,这需要在时间和精度上作个折中,需要和实际联系起来。比较重要的两个参数是MinSocre和Greediness,前一个用来分析模板的旋转对称和它们之间的相似度,值越大,则越相似,后一个是搜索贪婪度,这个值在很大程度上影响着搜索速度,若为0,则为启发式搜索,很耗时,若为1,则为不安全搜索,但最快。在大多数情况下,在能够匹配的情况下,尽可能的增大其值。
⑸ 找到之后,还需要对其进行转化,使之能够显示,这两个函数vector_angle_to_rigid()和affine_trans_contour_xld()在这里就起这个作用。前一个是从一个点和角度计算一个刚体仿射变换,这个函数从匹配函数的结果中对构造一个刚体仿射变换很有用,把参考图像变为当前图像。
目前调用Halcon函数确实可以解决问题,但最终还是要自主开发,目前的方案是先粗定位再精定位,精度要到亚像素级别,并且能输出角度。
注:转载请注明出处!
cvMatchTemplate( const CvArr* image, constCvArr* templ,CvArr* result,int method ) Image 待搜索图像 Templ 模板图像 Result 匹配结果 用来存放通过以下方法计算出滑动窗口与模板的相似值 Method 计算匹配程度的方法以上函数当模板存在较大旋转时就无法准确匹配了。
OpenCV形状匹配函数
double cvMatchShapes(void* object1,void* object2,int method) 第一个参数是待匹配的物体1, 第二个是待匹配的物体2, 第三个参数method可以有CV_CONTOURS_MATCH_I1,CV_CONTOURS_MATCH_I2,CV_CONTOURS_MATCH_I3三种输入,这其实就是三种不同的判定物体相似的方法,匹配的返回值也是不一样的。
以上函数匹配精度也不高,只能达到像素级。
特征点匹配如Sift算法等需要图像质量较好,噪声大的图像不适应,而且找到特征点之间一一对应关系是难点。
halcon等商业软件这方面做的很好。halcon基于形状的匹配Shape-Based matching能完美解决工业条件下的模板匹配问题。
HALCON提供的基于形状匹配的算法主要是针对感兴趣的小区域来建立模板,对整个图像建立模板也可以,但这样除非是对象在整个图像中所占比例很大,比如像视频会议中人 体上半身这样的图像,我在后面的视频对象跟踪实验中就是针对整个图像的,这往往也是要牺牲匹配速度的。基本流程是这样的:
⑴ 首先确定出ROI的矩形区域,这里只需要确定矩形的左上点和右下点的坐标即可,gen_rectangle1()这个函数就会帮助你生成一个矩形,利用area_center()找到这个矩形的中心;
⑵ 然后需要从图像中获取这个矩形区域的图像,reduce_domain()会得到这个ROI;这之后就可以对这个矩形建立模板,而在建立模板之前,可以先对这个区域进行一些处理,方便以后的建模,比如阈值分割,数学形态学的一些处理等等;
⑶ 接下来就可以利用create_shape_model()来创建模板了,这个函数有许多参数,其中金字塔的级数由Numlevels指定,值越大则找到物体的时间越少,AngleStart和AngleExtent决定可能的旋转范围,AngleStep指定角度范围搜索的步长;这里需要提醒的是,在任何情况下,模板应适合主内存,搜索时间会缩短。对特别大的模板,用Optimization来减少模板点的数量是很有用的;MinConstrast将模板从图像的噪声中分离出来,如果灰度值的波动范围是10,则MinConstrast应当设为10;Metric参数决定模板识别的条件,如果设为’use_polarity’,则图像中的物体和模板必须有相同的对比度;创建好模板后,这时还需要监视模板,用inspect_shape_model()来完成,它检查参数的适用性,还能帮助找到合适的参数;另外,还需要获得这个模板的轮廓,用于后面的匹配,get_shape_model_contours()则会很容易的帮我们找到模板的轮廓;
⑷ 创建好模板后,就可以打开另一幅图像,来进行模板匹配了。这个过程也就是在新图像中寻找与模板匹配的图像部分,这部分的工作就由函数find_shape_model()来承担了,它也拥有许多的参数,这些参数都影响着寻找模板的速度和精度。这个的功能就是在一幅图中找出最佳匹配的模板,返回一个模板实例的长、宽和旋转角度。其中参数SubPixel决定是否精确到亚像素级,设为’interpolation’,则会精确到,这个模式不会占用太多时间,若需要更精确,则可设为’least_square’,’lease_square_high’,但这样会增加额外的时间,因此,这需要在时间和精度上作个折中,需要和实际联系起来。比较重要的两个参数是MinSocre和Greediness,前一个用来分析模板的旋转对称和它们之间的相似度,值越大,则越相似,后一个是搜索贪婪度,这个值在很大程度上影响着搜索速度,若为0,则为启发式搜索,很耗时,若为1,则为不安全搜索,但最快。在大多数情况下,在能够匹配的情况下,尽可能的增大其值。
⑸ 找到之后,还需要对其进行转化,使之能够显示,这两个函数vector_angle_to_rigid()和affine_trans_contour_xld()在这里就起这个作用。前一个是从一个点和角度计算一个刚体仿射变换,这个函数从匹配函数的结果中对构造一个刚体仿射变换很有用,把参考图像变为当前图像。
目前调用Halcon函数确实可以解决问题,但最终还是要自主开发,目前的方案是先粗定位再精定位,精度要到亚像素级别,并且能输出角度。
注:转载请注明出处!

相关文章推荐
- 机器视觉Halcon:颗粒计数(基于形状模板匹配)
- HALCON基于形状的模板匹配
- 【Halcon】基于形状的模板匹配
- 模板匹配(基于形状模板)check_soft_cheese例程
- Halcon学习之基于形状的模板匹配(一)
- 模板匹配(基于形状)inspect_shampoo_label例程
- Halcon编程-基于形状特征的模板匹配
- halcon 基于形状模板匹配的定位与测定
- Halcon中基于形状模板的匹配
- 模板匹配(基于形状分析)
- halcon模板匹配(基于形状)——笔记
- Halcon中基于形状模板的匹配
- 基于HALCON的模板匹配方法总结
- 基于边界的模板匹配的原理及算法实现
- 基于HALCON的模板匹配方法总结
- 图像处理中的模板匹配(程序基于Op…
- 基于模板匹配和遗传算法的人眼定位
- 基于灰度的模板匹配算法(一):MAD、SAD、SSD、MSD、NCC、SSDA算法
- halcon模板匹配之形状匹配法
- 基于HALCON的模板匹配方法总结