范数
2015-03-24 18:51
218 查看
1. 概念
一个矩阵 x 的 p 范数可以定义为:||x||p=∑i|xi|p−−−−−−−√p
0 范数
表示非0元素的个数
1 范数
所有元素的绝对值的和:||x||1=∑i|xi|
2 范数
所有元素的平方和,然后开根号:||x||2=∑i|xi|2−−−−−−√
无穷范数
最大元素的绝对值
2. l0 范数
在压缩感知(compress sensing)理论中,要找到最稀疏的解(也就是有最少的非0元素个数的解),可以用下式表示:min||x||0s.t.Ax=b
然而,我们不确定 x 中有几个非 0 元素,也不确定哪几个是非 0 元素,要想求解,每种情况都遍历一遍,这样的计算量是不可想象的,是一个 NP-hard 问题。
3. NP-hard 问题
什么是 NP-hard 问题呢,NP是指非确定性多项式。所谓非确定性多项式是指,可用一定数量的运算解决的多项式时间内可以解决的问题。最典型的 NP-hard 问题就是图论中的旅行、推销员问题:已知一个 n 个点的完全图,每条边都有一个长度,求总长度最短的,经过每个点各一次的封闭回路。
必须检查所有的可行方案,才能确定当前解是否最优,这就是 NP-hard 问题。
4. l1 范数
l1 范数是 l0 范数(非凸)的最优凸近似,比 l0 范数更容易优化求解,所以可以将 l0 范数的优化转换为 l1 范数的优化:min||x||0s.t.Ax=b在一定条件下<=========>概率意义下等价min||x||1s.t.Ax=b
上述式子中所述的
在一定条件下,就是压缩感知理论中所说的:投影矩阵满足 RIP 性质的条件下。
5. 范数稀疏刻化
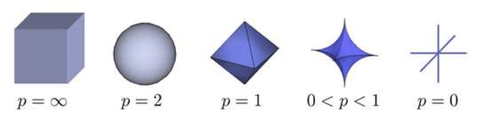
如上图所示,是不同范数的三维空间表示形式,0 范数表示坐标轴,1范数是锥体,2范数表示一个球体,从上图也可以看出,p < 1 时,p范数是非凸的,当 p >= 1 时,是凸的。
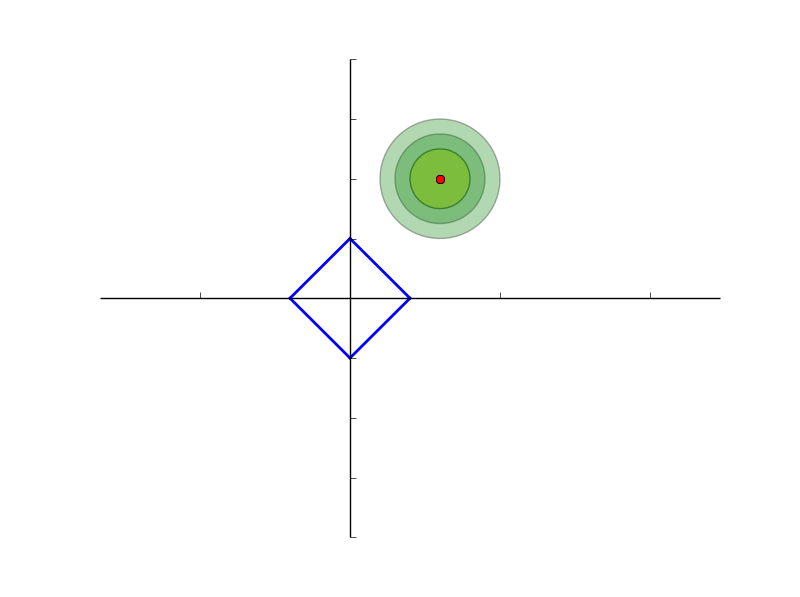
如上图所示,四边形表示 1 范数,圆环表示目标函数的等高线,目标函数很有可能与l1中的角点首先相交(在角点处相交就产生了稀疏性),而在l2中就没有角点,也就没有这样的特性。所以,通过 l1 范数约束可以求得稀疏解,而通过 l2 范数不能产生稀疏解。
那么为什么上图中等高线与角点相交的概率更高呢?看下图所示:
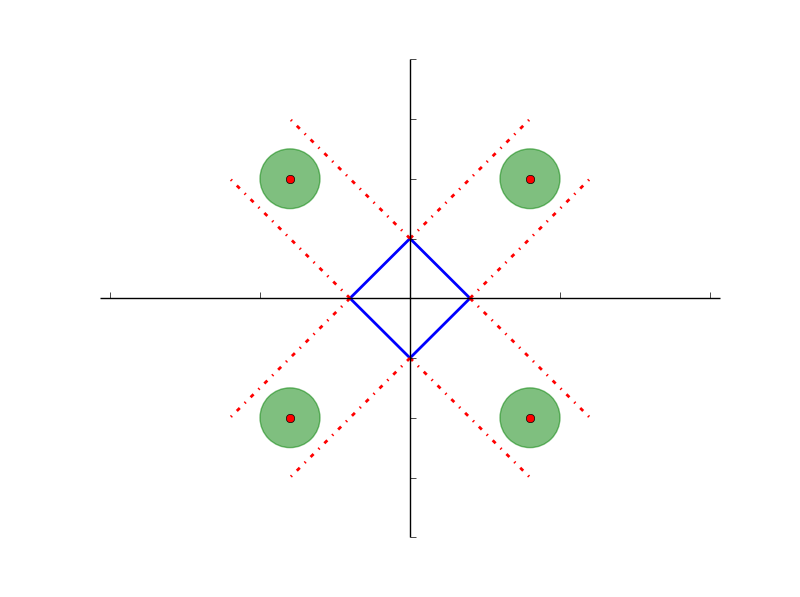
如果圆的中心位于上图所示的红色虚线包围的4个区域,那么等高线总会先于四边形的四个边相交,而如果圆心不在这四个区域,那么必定先于角点相交。而红色虚线包围的区域要远远小于除此之外的区域,所以,从概率上说,目标函数很可能与角点首先相交。
当然,对于 lp (0 < p < 1),与角点相交的可能性就更大,所以比 l1 具有更好的稀疏刻画能力(但是非凸)。
稀疏刻化能力:l0>lp(0<p<1)>l1>l2

相关文章推荐
- cvNormalize 根据某种范数或者数值范围归一化数组.
- 矩阵论学习笔记二:范数理论及其应用
- 矩阵论 第四章 矩阵分析(1) 范数
- [转]矩阵按列按行归一化到L2范数的原理和最精简Matlab代码
- 关于匹配的疑问:内积 or 二范数
- 为什么压缩感知用L1范数能够还原稀疏解?
- 二范数-特征值的意义-矩阵范数-向量范数-
- ‖ ‖ 范数
- 机器学习中的范数规则化之(二)核范数与规则项参数选择 非常好,必看
- 关于范数的理解
- 机器学习中的范数规则化之(…
- l1范数最小化快速算法
- 压缩感知中的数学知识:稀疏、范数、符号arg min
- 范数的物理意义
- 笔记︱范数正则化L0、L1、L2-岭回归&Lasso回归(稀疏与特征工程)
- kl距离(散度)&l1范数区别
- paper 127:机器学习中的范数规则化之(二)核范数与规则项参数选择
- 范数
- 范数和距离
- 参数的范数正则/惩罚(parameter norm penalties)