ROS学习(十七)安装ARDUINO IDE使用rosserial
2013-10-31 15:23
537 查看
arduino和arduino IDE是非常好的和简单的可编程硬件工具,使用rosserial_arduino包,你可以使用arduino IDE直接使用ROS。rosserial提供了一个通信协议,它通过arduino的UART来工作。它允许arduino作为一个ROS的节点,可以直接发布和订阅ROS的消息,发布TF变换,以及获取ROS的系统时间。
如果你没有安装arduino IDE的话,请安装:
安装完成以后需要设置sketchbook的位置,sketchbook是用来存储你的程序的地方,当设置完成以后关闭IDE。ROS的封装被实现在一个arduino库中。像所有的arduino库一样,ros_lib通过把它的库放到你的sketchbook的库文件夹下来工作。如果你的sketchbook下面没有一个库文件夹,就创建一个。在使用ROS的哭文件时,必须在代码的开头包括:
上面的这条代码必须放在最开头才行,否则就会发生错误。安装rosserial:
接下来安装ros_lib,打开你的sketchbook目录,在下面新建利益libraries目录,一般shetchbook的目录可以在file->preference中查看和设置:
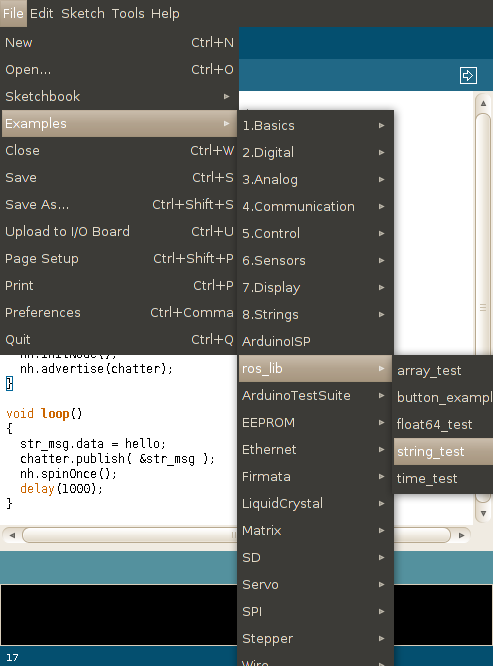
接下来重启arduino就可以了,看到结果如下:
如果你没有安装arduino IDE的话,请安装:
sudo apt-get install arduino
安装完成以后需要设置sketchbook的位置,sketchbook是用来存储你的程序的地方,当设置完成以后关闭IDE。ROS的封装被实现在一个arduino库中。像所有的arduino库一样,ros_lib通过把它的库放到你的sketchbook的库文件夹下来工作。如果你的sketchbook下面没有一个库文件夹,就创建一个。在使用ROS的哭文件时,必须在代码的开头包括:
#include <ros.h>
上面的这条代码必须放在最开头才行,否则就会发生错误。安装rosserial:
sudo apt-get install ros-hydro-rosserial-arduino sudo apt-get install ros-hydro-rosserial
接下来安装ros_lib,打开你的sketchbook目录,在下面新建利益libraries目录,一般shetchbook的目录可以在file->preference中查看和设置:
cd <sketchbook>/libraries rm -rf ros_lib rosrun rosserial_arduino make_libraries.py .
接下来重启arduino就可以了,看到结果如下:

相关文章推荐
- 机器人操作系统(ROS)教程19:安装ARDUINO IDE使用rosserial
- ROS: ROS与Arduino-Arduino IDE 安装和使用
- ROS的学习(十八)使用rosserial创建一个publisher
- Liferay Portal 6学习笔记3:Liferay IDE的安装使用
- Ubuntu 16.04 + ROS Kinetic 机器人操作系统学习镜像分享与使用安装说明
- IOS 开发学习 十七MAC上安装使用homebrew
- Ubuntu 16.04 + ROS Kinetic 机器人操作系统学习镜像分享与使用安装说明
- Ubuntu 16.04 + ROS Kinetic 机器人操作系统学习镜像分享与使用安装说明
- windows系统下安装和使用ROS的解决方案 (1 win_ros 2 rosserial_windows)
- windows系统下安装和使用ROS的解决方案 (1 win_ros 2 rosserial_windows)
- Ubuntu 16.04 + ROS Kinetic 机器人操作系统学习镜像分享与使用安装说明
- windows系统下安装和使用ROS的解决方案 (1 win_ros 2 rosserial_windows)
- rosserial_arduino的安装及使用
- ROS学习--(十七)turtlebot的安装
- 使用rosserial把Arduino作为ROS一个Node遇到的一个问题
- MQTT的学习研究(十七)Mosquitto简要教程(安装&使用)
- MQTT的学习研究(十七)Mosquitto简要教程(安装&使用)
- WIN7下使用sublime text3替代arduino IDE(安装方法和所遇到的问题)
- ros_arduino_bridge的安装及使用
- ROS-kinetic 与Arduino-Arduino IDE 安装