Linux驱动子系统之I2C(1)
2013-09-16 10:08
281 查看
1 硬件特性
1.1 概述I2C总线是由Philips公司开发的两线式串行总线,这两根线为时钟线(SCL)和双向数据线(SDA)。由于I2C总线仅需要两根线,因此在电路板上占用的空间更少,带来的问题是带宽较窄。I2C在标准模式下传输速率最高100Kb/s,在快速模式下最高可达400kb/s。属于半双工。
在嵌入式系统中,I2C应用非常广泛,大多数微控制器中集成了I2C总线,一般用于和RTC,EEPROM,智能电池电路,传感器,LCD以及其他类似设备之间的通信。
1.2 I2C总线传输时序

1.3 I2C总线的信号状态
1、 空闲状态:SDA和SCL都是高电平;
2、 开始条件(S):SCL为高电平时,SDA由高电平向低电平跳变,开始传输数据;
3、 结束条件(P):SCL为高电平时,SDA由低电平向高电平跳变,结束传输数据;
4、 数据有效:在SCL的高电平期间,SDA保持稳定,数据有效。SDA的改变只能发生在SCL的低电平期间;
5、 ACK信号:数据传输的过程中,***件每接收一个字节数据要产生一个ACK信号,向发送器件发出特定的低电平脉冲,表示已经收到数据。
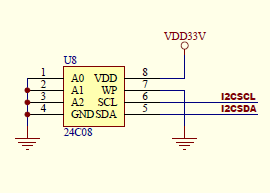
1.4 从设备地址
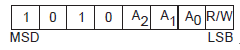
I2C总线从设备使用7位地址,最后一个为读写控制位。下图是eeprom的原理图,我们可以计算出它的地址为0x50。
1.5 I2C读写方式
多字节写的时序

多字节读的时序
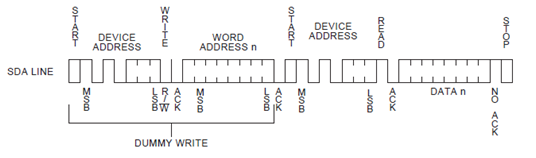
具体可参考datasheet

相关文章推荐
- Linux I2C子系统分析-I2C总线驱动&&Linux I2C子系统分析-I2C设备驱动
- Linux I2C子系统分析-I2C设备驱动
- Linux驱动编程--基于I2C子系统的I2C驱动
- Linux驱动编程--基于I2C子系统的I2C驱动
- Linux I2C子系统分析-I2C设备驱动
- Linux驱动子系统之I2C(2)
- Linux驱动子系统之I2C(4)
- Linux驱动编程--基于I2C子系统的I2C驱动
- Linux驱动编程--基于I2C子系统的I2C驱动
- Linux驱动子系统之I2C(3)
- Linux驱动编程--基于I2C子系统的I2C驱动
- Linux驱动编程--基于I2C子系统的I2C驱动
- Linux驱动子系统之I2C(1)
- Linux驱动子系统之I2C(2) .
- linux ------ I2C 子系统及设备驱动
- Linux驱动子系统之I2C(4)
- Linux I2C子系统驱动阐述
- linux驱动子系统--I2C
- Linux驱动子系统之I2C(2)
- Linux驱动子系统之I2C(3)