【opencv】IplImage详细说明以及访问每个元素的方法
2013-07-17 14:33
381 查看
/article/1357522.html从这里转来的,她的讲解都很详细的~
开始他的文章转载之前,先加点里面重要地方的说明~
depth和nChannels
depth代表颜色深度,使用的是以下定义的宏,nChannels是通道数,为1,2,3或4。
depth的宏定义:
IPL_DEPTH_8U,无符号8bit整数(8u)
IPL_DEPTH_8S,有符号8bit整数(8s)
IPL_DEPTH_16S,有符号16bit整数(16s)
IPL_DEPTH_32S,有符号32bit整数(32s)
IPL_DEPTH_32F,32bit浮点数,单精度(32f)
IPL_DEPTH_64F,64bit浮点数,双精度(64f)
(注:这里的颜色深度是指单个通道的数据保存为的变量类型,例如RGB24格式的数据,通道数为3,颜色深度为IPL_DEPTH_8U)
char是-128~127,uchar是0~255 所以这里用的是uchar。
彩色图像如果为多通道,排列的顺序为BGR而不是RGB
接下来就开始转载喽~
IplImage是OpenCV中CxCore部分基础的数据结构,用来表示图像,其中Ipl是Intel Image Processing Library的简写。以下是IplImage的结构分析(来自OpenCV中文网站:http://www.opencv.org.cn/index.php/Cxcore%E5%9F%BA%E7%A1%80%E7%BB%93%E6%9E%84#IplImage)
[cpp]
view plaincopyprint?
typedef struct _IplImage
{
int nSize; /* IplImage大小 */
int ID; /* 版本 (=0)*/
int nChannels; /* 大多数OPENCV函数支持1,2,3 或 4 个通道 */
int alphaChannel; /* 被OpenCV忽略 */
int depth; /* 像素的位深度: IPL_DEPTH_8U, IPL_DEPTH_8S, IPL_DEPTH_16U,
IPL_DEPTH_16S, IPL_DEPTH_32S, IPL_DEPTH_32F and IPL_DEPTH_64F 可支持 */
char colorModel[4]; /* 被OpenCV忽略 */
char channelSeq[4]; /* 同上 */
int dataOrder; /* 0 - 交叉存取颜色通道, 1 - 分开的颜色通道.
cvCreateImage只能创建交叉存取图像 */
int origin; /* 0 - 顶—左结构,
1 - 底—左结构 (Windows bitmaps 风格) */
int align; /* 图像行排列 (4 or 8). OpenCV 忽略它,使用 widthStep 代替 */
int width; /* 图像宽像素数 */
int height; /* 图像高像素数*/
struct _IplROI *roi;/* 图像感兴趣区域. 当该值非空只对该区域进行处理 */
struct _IplImage *maskROI; /* 在 OpenCV中必须置NULL */
void *imageId; /* 同上*/
struct _IplTileInfo *tileInfo; /*同上*/
int imageSize; /* 图像数据大小(在交叉存取格式下imageSize=image->height*image->widthStep),单位字节*/
char *imageData; /* 指向排列的图像数据 */
int widthStep; /* 排列的图像行大小,以字节为单位 */
int BorderMode[4]; /* 边际结束模式, 被OpenCV忽略 */
int BorderConst[4]; /* 同上 */
char *imageDataOrigin; /* 指针指向一个不同的图像数据结构(不是必须排列的),是为了纠正图像内存分配准备的 */
}
IplImage;
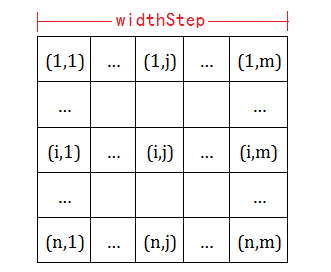
一个m*n的单通道字节型图像,其imageData排列如下:
如果我们要遍历图像中的元素,只需:
[cpp]
view plaincopyprint?
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1);
uchar* tmp;
for(int i=0;i<img->height;i++)
for(int j=0;j<img->width;j++)
*tmp=((uchar *)(img->imageData + i*img->widthStep))[j];
这种直接访问的方法速度快,但容易出错,我们可以通过定义指针来访问。即:
[cpp]
view plaincopyprint?
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1);
ucha* data=(uchar *)img->imageData;
int step = img->widthStep/sizeof(uchar);
uchar* tmp;
for(int i=0;i<img->height;i++)
for(int j=0;j<img->width;j++)
*tmp=data[i*step+j];
而多通道(三通道)字节图像中,imageData排列如下:
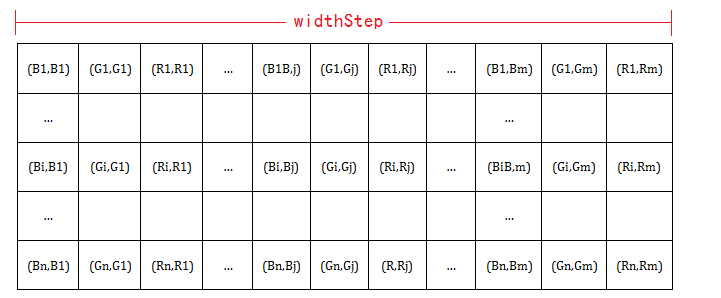
其中(Bi,Bj)(Gi,Gj)(Ri,Rj)表示图像(i,j)处BGR分量的值。使用指针的遍历方法如下:
[cpp]
view plaincopyprint?
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1);
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,3);
uchar* data=(uchar *)img->imageData;
int step = img->widthStep/sizeof(uchar);
int channels = img->nChannels;
uchar *b,*g,*r;
for(int i=0;i<img->height;i++)
for(int j=0;j<img->width;j++){
*b=data[i*step+j*chanels+0];
*g=data[i*step+j*chanels+1];
*r=data[i*step+j*chanels+2];
}
*如果要修改某像素值,则直接赋值。
[cpp]
view plaincopyprint?
CvScalar cvGet1D( const CvArr* arr, int idx0 ); CvScalar cvGet2D( const CvArr* arr, int idx0, int idx1 ); CvScalar cvGet3D( const CvArr* arr, int idx0, int idx1, int idx2 ); CvScalar cvGetND( const CvArr* arr, int* idx );
因此,单通道图像像素访问方式如下:
[cpp]
view plaincopyprint?
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1);
double tmp;
for(int i=0;i<img->height;i++)
for(int j=0;j<img->width;j++)
tmp=cvGet2D(img,i,j).val[0];
[cpp]
view plaincopyprint?
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_32F,3);
double tmpb,tmpg,bmpr;
for(int i=0;i<img->height;i++)
for(int j=0;j<img->width;j++){
tmpb=cvGet2D(img,i,j).val[0];
tmpg=cvGet2D(img,i,j).val[1];
tmpr=cvGet2D(img,i,j).val[2];
}
如果是修改元素的值,可用cvSet*D(一般是cvSet2D)函数:
[cpp]
view plaincopyprint?
void cvSet1D( CvArr* arr, int idx0, CvScalar value ); void cvSet2D( CvArr* arr, int idx0, int idx1, CvScalar value ); void cvSet3D( CvArr* arr, int idx0, int idx1, int idx2, CvScalar value ); void cvSetND( CvArr* arr, int* idx, CvScalar value );
开始他的文章转载之前,先加点里面重要地方的说明~
depth和nChannels
depth代表颜色深度,使用的是以下定义的宏,nChannels是通道数,为1,2,3或4。
depth的宏定义:
IPL_DEPTH_8U,无符号8bit整数(8u)
IPL_DEPTH_8S,有符号8bit整数(8s)
IPL_DEPTH_16S,有符号16bit整数(16s)
IPL_DEPTH_32S,有符号32bit整数(32s)
IPL_DEPTH_32F,32bit浮点数,单精度(32f)
IPL_DEPTH_64F,64bit浮点数,双精度(64f)
(注:这里的颜色深度是指单个通道的数据保存为的变量类型,例如RGB24格式的数据,通道数为3,颜色深度为IPL_DEPTH_8U)
char是-128~127,uchar是0~255 所以这里用的是uchar。
彩色图像如果为多通道,排列的顺序为BGR而不是RGB
接下来就开始转载喽~
IplImage是OpenCV中CxCore部分基础的数据结构,用来表示图像,其中Ipl是Intel Image Processing Library的简写。以下是IplImage的结构分析(来自OpenCV中文网站:http://www.opencv.org.cn/index.php/Cxcore%E5%9F%BA%E7%A1%80%E7%BB%93%E6%9E%84#IplImage)
[cpp]
view plaincopyprint?
typedef struct _IplImage
{
int nSize; /* IplImage大小 */
int ID; /* 版本 (=0)*/
int nChannels; /* 大多数OPENCV函数支持1,2,3 或 4 个通道 */
int alphaChannel; /* 被OpenCV忽略 */
int depth; /* 像素的位深度: IPL_DEPTH_8U, IPL_DEPTH_8S, IPL_DEPTH_16U,
IPL_DEPTH_16S, IPL_DEPTH_32S, IPL_DEPTH_32F and IPL_DEPTH_64F 可支持 */
char colorModel[4]; /* 被OpenCV忽略 */
char channelSeq[4]; /* 同上 */
int dataOrder; /* 0 - 交叉存取颜色通道, 1 - 分开的颜色通道.
cvCreateImage只能创建交叉存取图像 */
int origin; /* 0 - 顶—左结构,
1 - 底—左结构 (Windows bitmaps 风格) */
int align; /* 图像行排列 (4 or 8). OpenCV 忽略它,使用 widthStep 代替 */
int width; /* 图像宽像素数 */
int height; /* 图像高像素数*/
struct _IplROI *roi;/* 图像感兴趣区域. 当该值非空只对该区域进行处理 */
struct _IplImage *maskROI; /* 在 OpenCV中必须置NULL */
void *imageId; /* 同上*/
struct _IplTileInfo *tileInfo; /*同上*/
int imageSize; /* 图像数据大小(在交叉存取格式下imageSize=image->height*image->widthStep),单位字节*/
char *imageData; /* 指向排列的图像数据 */
int widthStep; /* 排列的图像行大小,以字节为单位 */
int BorderMode[4]; /* 边际结束模式, 被OpenCV忽略 */
int BorderConst[4]; /* 同上 */
char *imageDataOrigin; /* 指针指向一个不同的图像数据结构(不是必须排列的),是为了纠正图像内存分配准备的 */
}
IplImage;
typedef struct _IplImage
{
int nSize; /* IplImage大小 */
int ID; /* 版本 (=0)*/
int nChannels; /* 大多数OPENCV函数支持1,2,3 或 4 个通道 */
int alphaChannel; /* 被OpenCV忽略 */
int depth; /* 像素的位深度: IPL_DEPTH_8U, IPL_DEPTH_8S, IPL_DEPTH_16U,
IPL_DEPTH_16S, IPL_DEPTH_32S, IPL_DEPTH_32F and IPL_DEPTH_64F 可支持 */
char colorModel[4]; /* 被OpenCV忽略 */
char channelSeq[4]; /* 同上 */
int dataOrder; /* 0 - 交叉存取颜色通道, 1 - 分开的颜色通道.
cvCreateImage只能创建交叉存取图像 */
int origin; /* 0 - 顶—左结构,
1 - 底—左结构 (Windows bitmaps 风格) */
int align; /* 图像行排列 (4 or 8). OpenCV 忽略它,使用 widthStep 代替 */
int width; /* 图像宽像素数 */
int height; /* 图像高像素数*/
struct _IplROI *roi;/* 图像感兴趣区域. 当该值非空只对该区域进行处理 */
struct _IplImage *maskROI; /* 在 OpenCV中必须置NULL */
void *imageId; /* 同上*/
struct _IplTileInfo *tileInfo; /*同上*/
int imageSize; /* 图像数据大小(在交叉存取格式下imageSize=image->height*image->widthStep),单位字节*/
char *imageData; /* 指向排列的图像数据 */
int widthStep; /* 排列的图像行大小,以字节为单位 */
int BorderMode[4]; /* 边际结束模式, 被OpenCV忽略 */
int BorderConst[4]; /* 同上 */
char *imageDataOrigin; /* 指针指向一个不同的图像数据结构(不是必须排列的),是为了纠正图像内存分配准备的 */
}
IplImage;直接访问:
对我们来说比较重要的两个元素是:char *imageData以及widthStep。imageData存放图像像素数据,而widStep类似CvMat中的step,表示以字节为单位的行数据长度。一个m*n的单通道字节型图像,其imageData排列如下:
如果我们要遍历图像中的元素,只需:
[cpp]
view plaincopyprint?
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1);
uchar* tmp;
for(int i=0;i<img->height;i++)
for(int j=0;j<img->width;j++)
*tmp=((uchar *)(img->imageData + i*img->widthStep))[j];
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1); uchar* tmp; for(int i=0;i<img->height;i++) for(int j=0;j<img->width;j++) *tmp=((uchar *)(img->imageData + i*img->widthStep))[j];
这种直接访问的方法速度快,但容易出错,我们可以通过定义指针来访问。即:
[cpp]
view plaincopyprint?
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1);
ucha* data=(uchar *)img->imageData;
int step = img->widthStep/sizeof(uchar);
uchar* tmp;
for(int i=0;i<img->height;i++)
for(int j=0;j<img->width;j++)
*tmp=data[i*step+j];
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1); ucha* data=(uchar *)img->imageData; int step = img->widthStep/sizeof(uchar); uchar* tmp; for(int i=0;i<img->height;i++) for(int j=0;j<img->width;j++) *tmp=data[i*step+j];
而多通道(三通道)字节图像中,imageData排列如下:
其中(Bi,Bj)(Gi,Gj)(Ri,Rj)表示图像(i,j)处BGR分量的值。使用指针的遍历方法如下:
[cpp]
view plaincopyprint?
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1);
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,3);
uchar* data=(uchar *)img->imageData;
int step = img->widthStep/sizeof(uchar);
int channels = img->nChannels;
uchar *b,*g,*r;
for(int i=0;i<img->height;i++)
for(int j=0;j<img->width;j++){
*b=data[i*step+j*chanels+0];
*g=data[i*step+j*chanels+1];
*r=data[i*step+j*chanels+2];
}
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1);
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,3);
uchar* data=(uchar *)img->imageData;
int step = img->widthStep/sizeof(uchar);
int channels = img->nChannels;
uchar *b,*g,*r;
for(int i=0;i<img->height;i++)
for(int j=0;j<img->width;j++){
*b=data[i*step+j*chanels+0];
*g=data[i*step+j*chanels+1];
*r=data[i*step+j*chanels+2];
}*如果要修改某像素值,则直接赋值。
使用cvGet2D()函数访问:
cvGet*D系列函数可以用来返回特定位置的数组元素(一般使用cvGet2D),原型如下:[cpp]
view plaincopyprint?
CvScalar cvGet1D( const CvArr* arr, int idx0 ); CvScalar cvGet2D( const CvArr* arr, int idx0, int idx1 ); CvScalar cvGet3D( const CvArr* arr, int idx0, int idx1, int idx2 ); CvScalar cvGetND( const CvArr* arr, int* idx );
CvScalar cvGet1D( const CvArr* arr, int idx0 ); CvScalar cvGet2D( const CvArr* arr, int idx0, int idx1 ); CvScalar cvGet3D( const CvArr* arr, int idx0, int idx1, int idx2 ); CvScalar cvGetND( const CvArr* arr, int* idx );idx0,idx1,idx2分别用来指示元素数组下标,即cvGet2D返回(idx0,idx1)处元素的值。
因此,单通道图像像素访问方式如下:
[cpp]
view plaincopyprint?
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1);
double tmp;
for(int i=0;i<img->height;i++)
for(int j=0;j<img->width;j++)
tmp=cvGet2D(img,i,j).val[0];
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1); double tmp; for(int i=0;i<img->height;i++) for(int j=0;j<img->width;j++) tmp=cvGet2D(img,i,j).val[0];多通道字节型/浮点型图像:
[cpp]
view plaincopyprint?
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_32F,3);
double tmpb,tmpg,bmpr;
for(int i=0;i<img->height;i++)
for(int j=0;j<img->width;j++){
tmpb=cvGet2D(img,i,j).val[0];
tmpg=cvGet2D(img,i,j).val[1];
tmpr=cvGet2D(img,i,j).val[2];
}
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_32F,3);
double tmpb,tmpg,bmpr;
for(int i=0;i<img->height;i++)
for(int j=0;j<img->width;j++){
tmpb=cvGet2D(img,i,j).val[0];
tmpg=cvGet2D(img,i,j).val[1];
tmpr=cvGet2D(img,i,j).val[2];
}如果是修改元素的值,可用cvSet*D(一般是cvSet2D)函数:
[cpp]
view plaincopyprint?
void cvSet1D( CvArr* arr, int idx0, CvScalar value ); void cvSet2D( CvArr* arr, int idx0, int idx1, CvScalar value ); void cvSet3D( CvArr* arr, int idx0, int idx1, int idx2, CvScalar value ); void cvSetND( CvArr* arr, int* idx, CvScalar value );
void cvSet1D( CvArr* arr, int idx0, CvScalar value ); void cvSet2D( CvArr* arr, int idx0, int idx1, CvScalar value ); void cvSet3D( CvArr* arr, int idx0, int idx1, int idx2, CvScalar value ); void cvSetND( CvArr* arr, int* idx, CvScalar value );这种方法对于任何图像的访问方式是一样的,比较简单,但效率较低,不推荐使用。

相关文章推荐
- OpenCV:Mat元素访问方法、性能、代码复杂度以及安全性分析
- OpenCV:Mat元素访问方法、性能、代码复杂度以及安全性分析
- OpenCV:Mat元素访问方法、性能、代码复杂度以及安全性分析
- OpenCv3.0架构的详细解释以及新增新功能的说明(当然OpenCv3.2.0中的很多新功能更加强大,比如CNN,DNN的实现)
- opencv 访问矩阵元素的方法--转帖
- opencv2.2 Mat格式的几个参数以及几种元素存取方法的讨论
- OpenCV不同类型Mat的at方法访问元素时该如何确定模板函数的typename
- 传感器,加速计,蓝牙以及UIDevice方法的详细说明
- 在VS2008下使用OpenCV的方法 ——附图说明非常详细
- opencv IplImage各参数详细介绍以及如何从一个JPEG图像数据指针转换得到IplImage
- OpenCV:Mat元素访问方法、性能
- opencv2.x新数据结构cv::Mat访问元素的方法
- ContentResolver.update以及query方法参数详细说明
- OpenCV访问图像像素的方法收集以及自己实践中得体会
- opencv访问元素的几种方法
- opencv2.x新数据结构cv::Mat访问元素的方法
- opencv笔记 3.访问图像元素的四种方法
- 1 ubuntu下编译安装opencv2详细教程以及python调用opencv方法
- OpenCV像素点邻域遍历效率比较,以及访问像素点的几种方法
- opencv中如何访问IplImage图像中每个像素的值