【ARM】按键・查询式控制led灯・fs2410
2013-06-14 16:42
344 查看
开发环境 硬件平台:FS2410
主机:Ubuntu 12.04 LTS
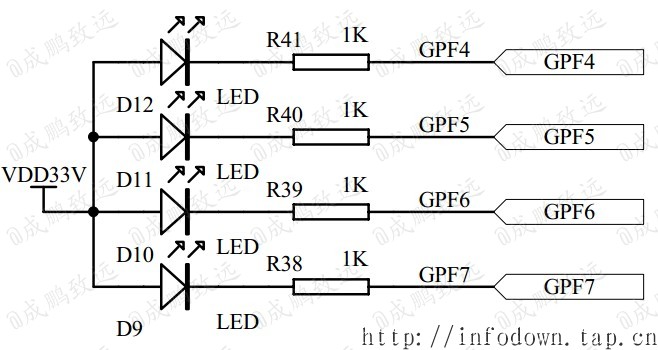
[b]LED灯原理图[/b]
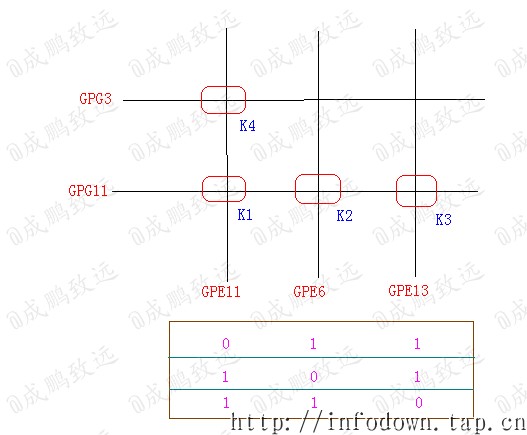
按键原理图
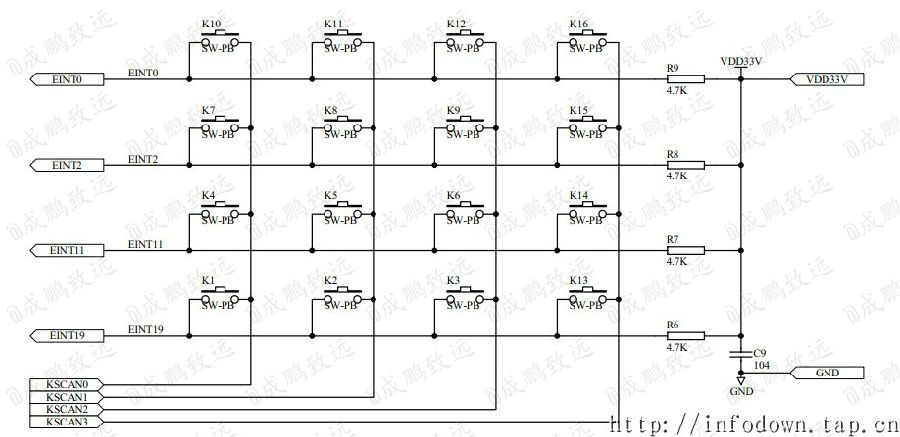
按键的接线资源
KSCAN0 -> GPE11 KSCAN1 -> GPG6 KSCAN2 -> GPE13 KSCAN3 -> GPG2
EINT0 -> GPF0 EINT2 -> GPF2 EINT11 -> GPG3 EINT19 -> GPG11
程序主要原理
这里实现对 K1,[b]K2,K3,K4 这四个键的查询。[/b]
主要涉及到K1,K2, K3, K4这四个按键,要用查询的方式进行判断哪个键被按下去了,因此:
将EINT11, EINT19设置为输入,用于读取;
将KSCAN0,KSCAN1,KSACAN2,设置为输出,并分别设置为0,1,1或1,0,1或1,1,0三种情况,这样可用于区分K1、K2、K3中哪个键按下去。
例如先让KSCAN0~2 = 011,那么K1被按下时,EINT19才会变为低电平,这时K2按下时,EINT19不会变低,这样就区分了按键K1和K2,区分其它按键原理一样。
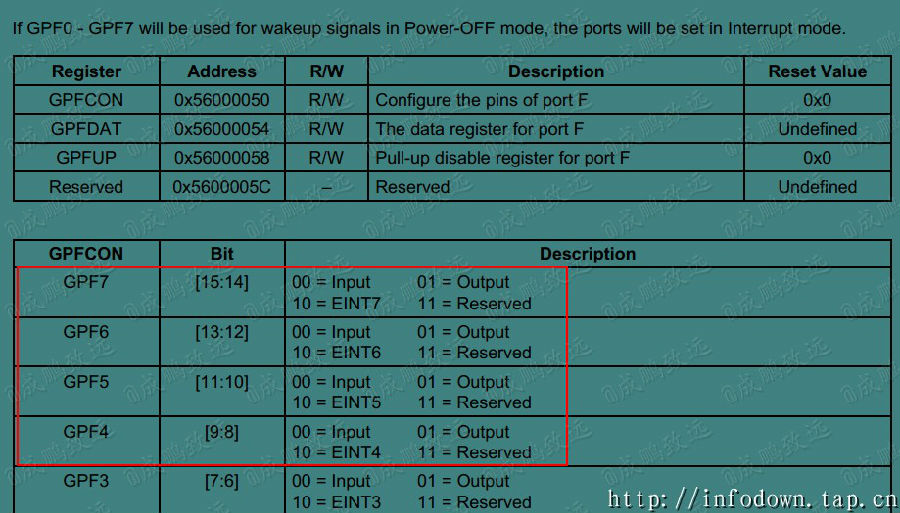
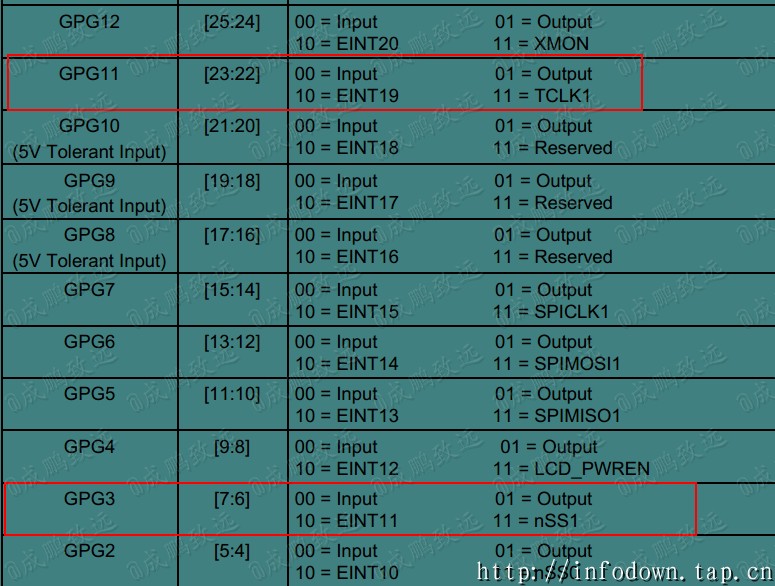
寄存器配置
有关LED的寄存器的配置:(设置GPF4-GPF7为输出)
按键方面涉及到寄存器配置(设置相关寄存器输入输出)

精简原理图
程序源代码
//led_key.c
//启动文件start.S
//Makefile
编译
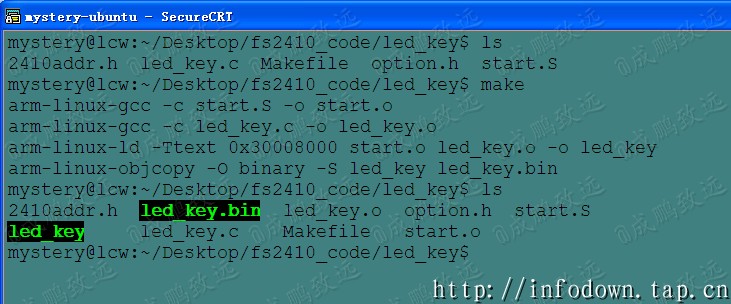
OK,生成 led_key.bin文件了
下载执行
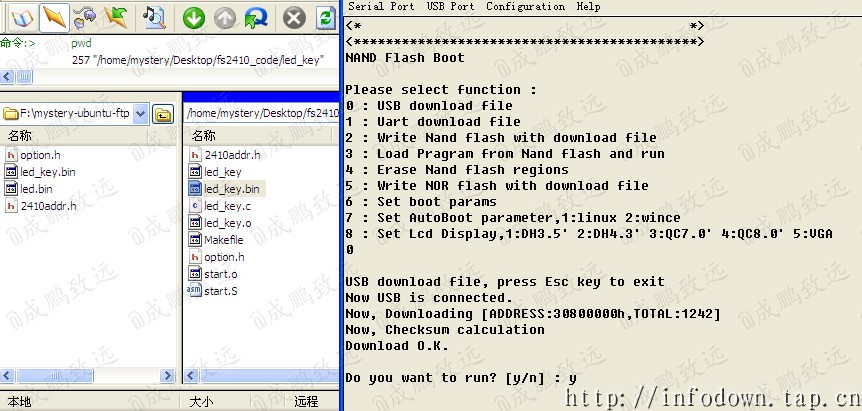
OK,运行成功!
本文出自 “创十三” 博客,请务必保留此出处http://liucw.blog.51cto.com/6751239/1222050
主机:Ubuntu 12.04 LTS
[b]LED灯原理图[/b]
按键原理图
按键的接线资源
KSCAN0 -> GPE11 KSCAN1 -> GPG6 KSCAN2 -> GPE13 KSCAN3 -> GPG2
EINT0 -> GPF0 EINT2 -> GPF2 EINT11 -> GPG3 EINT19 -> GPG11
程序主要原理
这里实现对 K1,[b]K2,K3,K4 这四个键的查询。[/b]
主要涉及到K1,K2, K3, K4这四个按键,要用查询的方式进行判断哪个键被按下去了,因此:
将EINT11, EINT19设置为输入,用于读取;
将KSCAN0,KSCAN1,KSACAN2,设置为输出,并分别设置为0,1,1或1,0,1或1,1,0三种情况,这样可用于区分K1、K2、K3中哪个键按下去。
例如先让KSCAN0~2 = 011,那么K1被按下时,EINT19才会变为低电平,这时K2按下时,EINT19不会变低,这样就区分了按键K1和K2,区分其它按键原理一样。
寄存器配置
有关LED的寄存器的配置:(设置GPF4-GPF7为输出)
按键方面涉及到寄存器配置(设置相关寄存器输入输出)
精简原理图
程序源代码
//led_key.c
#include "2410addr.h"
void delay(long long max) //延迟函数
{
for(; max > 0; max--);
}
int main(void)
{
int read_value;
rGPFCON = rGPFCON & (~(0xff) << 8) | (0x55 << 8); //设置4个LED灯为输出(GPF4-GPF7输出)
rGPFDAT |= (0xf << 4); //先将4个灯都熄灭掉
rGPGCON = (0 << 7) | (1 << 12) | (0 << 23); //GPG3, GPG11 输入,GPG6, GPE11, GPE13输出
rGPECON = (1 << 22) | (1 << 26);
while(1)
{
rGPEDAT &= (0 << 11); //将GPE11置0,同时将GPE13和GPG6置1
rGPEDAT |= (1 << 13);
rGPGDAT |= (1 << 6);
read_value = rGPGDAT & 0x808; //读取GPG11和GPG3的输入值
if((read_value & 0x800) == 0) //判断GPG11输入是否为0,以此判断K1键是否按下
{
read_value = 0x800;
delay(200000); //按键去抖
if((read_value &= rGPGDAT) == 0)
{
if((rGPFDAT & (1 << 4)) == 0) //判断D12是否亮着,如果亮着则熄灭,反之相反
rGPFDAT |= (0x1 << 4);
else
rGPFDAT &= (0xe << 4);
}
}
else
{
if((read_value & 0x8) == 0) //判断GPG3输入的值是否为0, 以此K4键是否按下
{
read_value = 0x8;
delay(200000); //按键去抖
if((read_value &= rGPGDAT) == 0)
{
if((rGPFDAT & (0x8 << 4)) == 0) //判断D9是都亮着,如果亮着则熄灭,反之相反
rGPFDAT |= (0x8 << 4);
else
rGPFDAT &= (0x7 << 4);
}
}
}
rGPEDAT |= (1 << 11); //将GPE11和GPE13置1,同时将GPG6置0
rGPEDAT |= (1 << 13);
rGPGDAT &= (0 << 6);
read_value = rGPGDAT & (0x8 << 8); //读取GPG11的值
if(read_value == 0) //判断GPG11是否输入0,以此判断K2键按下
{
read_value = 0x800;
delay(200000); //按键去抖
if((read_value &= rGPGDAT) == 0)
{
if((rGPFDAT & (0x2 << 4)) == 0) //判断D11是否亮着, 如果亮着则熄灭,反之相反
rGPFDAT |= (0x2 << 4);
else
rGPFDAT &= (0xd << 4);
}
}
rGPEDAT &= (0 << 13); //将GPE13置0, 同时将GPE11和GPG6置1
rGPEDAT |= (1 << 11);
rGPGDAT |= (1 << 6);
read_value = rGPGDAT & 0x800; //读取GPG11的值
if(read_value == 0) //判断GPG11是否为0,以此判断K3键是否按下
{
read_value = 0x800;
delay(200000); //按键去抖,延迟一段时间
if((read_value &= rGPGDAT) == 0)
{
if((rGPFDAT & (0x4 << 4)) == 0) //判断D10是否亮着,如果亮着则熄灭,反之相反
rGPFDAT |= (0x4 << 4);
else
rGPFDAT &= (0xb << 4);
}
}
}
return 0;
}//启动文件start.S
.text .global _start _start: #define WATCHDOG 0x53000000 ldr r0, =WATCHDOG mov r1, #0 str r1, [r0] ldr sp, =1024*4 bl main loop: b loop
//Makefile
led.bin:start.S led_key.c arm-linux-gcc -c start.S -o start.o arm-linux-gcc -c led_key.c -o led_key.o arm-linux-ld -Ttext 0x30008000 start.o led_key.o -o led_key arm-linux-objcopy -O binary -S led_key led_key.bin clean: rm -f *.o led_key.bin
编译
OK,生成 led_key.bin文件了
下载执行
OK,运行成功!
本文出自 “创十三” 博客,请务必保留此出处http://liucw.blog.51cto.com/6751239/1222050

相关文章推荐
- 【ARM】2410裸机系列-按键查询式控制led
- ARM裸机——FS2410按键控制LED灯(查询方式)
- 【ARM】按键·查询式控制led灯·fs2410
- ARM裸机——FS2410按键控制LED(中断方式)
- 【嵌入式】——arm裸机开发 step by step 之 按键控制 LED 和 蜂鸣器
- ARM按键控制LED
- ARM裸机程序开发——按键控制LED灯
- [置顶] ARM开发(4)基于STM32的矩阵键盘按键控制TM1629A LED显示
- arm汇编按键控制led灯
- 从ARM裸机看驱动之按键中断方式控制LED(二)
- 基于STM32的按键控制闪烁LED
- LPC2124--GPIO按键控制LED灯的闪烁
- [蓝点ZigBee] Zstack 之按键驱动以及控制LED灯 ZigBee/CC2530 视频资料
- Arduino 用两个按键分别控制两个LED灯点亮
- 4412裸机程序按键控制led灯
- 外部按键 控制 LED 中断 (参考 http://www.oschina.net/question/565065_115196?sort=time )
- 第三个实验 通过中断方式让按键控股按键控制LED
- wince6.0 +S3C6410 中断处理例子(按键控制LED灯)+应用程序控制LED流水灯
- 用LED灯和按键来模拟工业自动化设备的运动控制
- ARM:伪指令、伪操作、C和汇编混合操作、汇编控制LED