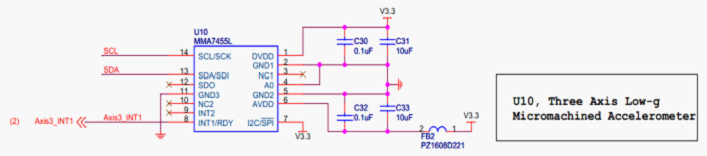
[Linux项目实践] 物联网单板测试之任务六:Accelerometer重力加速计
2012-04-05 21:36
423 查看
完成单板代码(部分IIC基代码共用之前博文)
/*任务6:Accelerometer重力加速计*/
Axis3_Test();
/*******************************************************************************
* Function Name : Axis3_Test
* Description : Accelerometer Test.
* Input : None
* Output : None
* Return : None
*******************************************************************************/
void Axis3_Test(void)
{
char buf[24];
int32_t xoff = 0;
int32_t yoff = 0;
int32_t zoff = 0;
int8_t x = 0;
int8_t y = 0;
int8_t z = 0;
OLED_ClearScreen();
OLED_DisStrLine(0, 0, "Axis-3");
printf("\r\nAxis-3\r\n");
I2CInit(I2CMASTER, 0);
acc_init();
/* Assume base board in zero-g position when reading first value. */
acc_read(&x, &y, &z);
xoff = 0-x;
yoff = 0-y;
zoff = 0-z;
while(1)
{
/* Accelerometer */
acc_read(&x, &y, &z);
x = x+xoff;
y = y+yoff;
z = z+zoff;
snprintf(buf, 20, "Acc x: %d ", x);
OLED_DisStrLine(2, 0, (uint8_t *)buf);
printf("\r\nAcc x: %d, ", x);
snprintf(buf, 20, "Acc y: %d ", y);
OLED_DisStrLine(3, 0, (uint8_t *)buf);
printf("Acc y: %d, ", y);
snprintf(buf, 20, "Acc z: %d ", z);
OLED_DisStrLine(4, 0, (uint8_t *)buf);
printf("Acc z: %d. ", z);
delay_ms(250);
if(KEY_Read() == KEY_ESC)
break;
}
}
1、I2CInit(I2CMASTER, 0);
/*****************************************************************************
** Function name: I2CInit
**
** Descriptions: Initialize I2C controller
**
** parameters: I2c mode is either MASTER or SL***E
** Returned value: true or false, return false if the I2C
** interrupt handler was not installed correctly
**
*****************************************************************************/
uint32_t I2CInit( uint32_t I2cMode, uint32_t slaveAddr )
{
/* It seems to be bit0 is for I2C, different from
UM. To be retested along with SSP reset. SSP and I2C
reset are overlapped, a known bug, for now, both SSP
and I2C use bit 0 for reset enable. Once the problem
is fixed, change to "#if 1". */
#if 1
LPC_SYSCON->PRESETCTRL |= (0x1<<1);
#else
LPC_SYSCON->PRESETCTRL |= (0x1<<0);
#endif
LPC_SYSCON->SYSAHBCLKCTRL |= (1<<5);
LPC_IOCON->PIO0_4 &= ~0x3F; /* I2C I/O config */
LPC_IOCON->PIO0_4 |= 0x01; /* I2C SCL */
LPC_IOCON->PIO0_5 &= ~0x3F;
LPC_IOCON->PIO0_5 |= 0x01; /* I2C SDA */
/*--- Clear flags ---*/
LPC_I2C->CONCLR = I2CONCLR_AAC | I2CONCLR_SIC | I2CONCLR_STAC | I2CONCLR_I2ENC;
/*--- Reset registers ---*/
#if FAST_MODE_PLUS
LPC_IOCON->PIO0_4 |= (0x1<<9);
LPC_IOCON->PIO0_5 |= (0x1<<9);
LPC_I2C->SCLL = I2SCLL_HS_SCLL;
LPC_I2C->SCLH = I2SCLH_HS_SCLH;
#else
LPC_I2C->SCLL = I2SCLL_SCLL;
LPC_I2C->SCLH = I2SCLH_SCLH;
#endif
if ( I2cMode == I2CSL***E )
{
LPC_I2C->ADR0 = slaveAddr;
}
/* Enable the I2C Interrupt */
NVIC_EnableIRQ(I2C_IRQn);
LPC_I2C->CONSET = I2CONSET_I2EN;
return( TRUE );
}
2、acc_init();
void acc_init (void)
{
/* set to measurement mode by default */
setModeControl( (ACC_MCTL_MODE(ACC_MODE_MEASURE) | ACC_MCTL_GLVL(ACC_RANGE_2G) ));
}
2.1、setModeControl()
static void setModeControl(uint8_t mctl)
{
uint8_t buf[2];
buf[0] = ACC_ADDR_MCTL;
buf[1] = mctl;
I2CWrite(ACC_I2C_ADDR, buf, 2);
}
2.1.1、ACC_ADDR_MCTL
#define ACC_ADDR_MCTL 0x16
2.1.2、ACC_I2C_ADDR
#define ACC_I2C_ADDR (0x1D << 1)
2.1.3、I2CWrite()
void I2CWrite(uint8_t addr, uint8_t* buf, uint32_t len)
{
I2CAddr = addr;
I2CMasterBuffer = buf;
I2CWriteLength = len;
I2CReadLength = 0;
I2CEngine();
I2CWriteLength = I2CWriteLength;
}
2.2、ACC_MCTL_MODE()
#define ACC_MCTL_MODE(m) ((m) << 0)
2.3、ACC_MCTL_GLVL()
#define ACC_MCTL_GLVL(g) ((g) << 2)
3、acc_read(&x, &y, &z);
/******************************************************************************
*
* Description:
* Read accelerometer data
*
* Params:
* [out] x - read x value
* [out] y - read y value
* [out] z - read z value
*
*****************************************************************************/
void acc_read (int8_t *x, int8_t *y, int8_t *z)
{
uint8_t buf[1];
/* wait for ready flag */
while ((getStatus() & ACC_STATUS_DRDY) == 0);
/*
* Have experienced problems reading all registers
* at once. Change to reading them one-by-one.
*/
buf[0] = ACC_ADDR_XOUT8;
I2CWrite(ACC_I2C_ADDR, buf, 1);
I2CRead(ACC_I2C_ADDR, buf, 1);
*x = (int8_t)buf[0];
buf[0] = ACC_ADDR_YOUT8;
I2CWrite(ACC_I2C_ADDR, buf, 1);
I2CRead(ACC_I2C_ADDR, buf, 1);
*y = (int8_t)buf[0];
buf[0] = ACC_ADDR_ZOUT8;
I2CWrite(ACC_I2C_ADDR, buf, 1);
I2CRead(ACC_I2C_ADDR, buf, 1);
*z = (int8_t)buf[0];
}
3.1、getStatus()
static uint8_t getStatus(void)
{
uint8_t buf[1];
buf[0] = ACC_ADDR_STATUS;
I2CWrite(ACC_I2C_ADDR, buf, 1);
I2CRead(ACC_I2C_ADDR, buf, 1);
return buf[0];
}
3.2、I2CWrite()
3.3、I2CRead()
/*任务6:Accelerometer重力加速计*/
Axis3_Test();
/*******************************************************************************
* Function Name : Axis3_Test
* Description : Accelerometer Test.
* Input : None
* Output : None
* Return : None
*******************************************************************************/
void Axis3_Test(void)
{
char buf[24];
int32_t xoff = 0;
int32_t yoff = 0;
int32_t zoff = 0;
int8_t x = 0;
int8_t y = 0;
int8_t z = 0;
OLED_ClearScreen();
OLED_DisStrLine(0, 0, "Axis-3");
printf("\r\nAxis-3\r\n");
I2CInit(I2CMASTER, 0);
acc_init();
/* Assume base board in zero-g position when reading first value. */
acc_read(&x, &y, &z);
xoff = 0-x;
yoff = 0-y;
zoff = 0-z;
while(1)
{
/* Accelerometer */
acc_read(&x, &y, &z);
x = x+xoff;
y = y+yoff;
z = z+zoff;
snprintf(buf, 20, "Acc x: %d ", x);
OLED_DisStrLine(2, 0, (uint8_t *)buf);
printf("\r\nAcc x: %d, ", x);
snprintf(buf, 20, "Acc y: %d ", y);
OLED_DisStrLine(3, 0, (uint8_t *)buf);
printf("Acc y: %d, ", y);
snprintf(buf, 20, "Acc z: %d ", z);
OLED_DisStrLine(4, 0, (uint8_t *)buf);
printf("Acc z: %d. ", z);
delay_ms(250);
if(KEY_Read() == KEY_ESC)
break;
}
}
1、I2CInit(I2CMASTER, 0);
/*****************************************************************************
** Function name: I2CInit
**
** Descriptions: Initialize I2C controller
**
** parameters: I2c mode is either MASTER or SL***E
** Returned value: true or false, return false if the I2C
** interrupt handler was not installed correctly
**
*****************************************************************************/
uint32_t I2CInit( uint32_t I2cMode, uint32_t slaveAddr )
{
/* It seems to be bit0 is for I2C, different from
UM. To be retested along with SSP reset. SSP and I2C
reset are overlapped, a known bug, for now, both SSP
and I2C use bit 0 for reset enable. Once the problem
is fixed, change to "#if 1". */
#if 1
LPC_SYSCON->PRESETCTRL |= (0x1<<1);
#else
LPC_SYSCON->PRESETCTRL |= (0x1<<0);
#endif
LPC_SYSCON->SYSAHBCLKCTRL |= (1<<5);
LPC_IOCON->PIO0_4 &= ~0x3F; /* I2C I/O config */
LPC_IOCON->PIO0_4 |= 0x01; /* I2C SCL */
LPC_IOCON->PIO0_5 &= ~0x3F;
LPC_IOCON->PIO0_5 |= 0x01; /* I2C SDA */
/*--- Clear flags ---*/
LPC_I2C->CONCLR = I2CONCLR_AAC | I2CONCLR_SIC | I2CONCLR_STAC | I2CONCLR_I2ENC;
/*--- Reset registers ---*/
#if FAST_MODE_PLUS
LPC_IOCON->PIO0_4 |= (0x1<<9);
LPC_IOCON->PIO0_5 |= (0x1<<9);
LPC_I2C->SCLL = I2SCLL_HS_SCLL;
LPC_I2C->SCLH = I2SCLH_HS_SCLH;
#else
LPC_I2C->SCLL = I2SCLL_SCLL;
LPC_I2C->SCLH = I2SCLH_SCLH;
#endif
if ( I2cMode == I2CSL***E )
{
LPC_I2C->ADR0 = slaveAddr;
}
/* Enable the I2C Interrupt */
NVIC_EnableIRQ(I2C_IRQn);
LPC_I2C->CONSET = I2CONSET_I2EN;
return( TRUE );
}
2、acc_init();
void acc_init (void)
{
/* set to measurement mode by default */
setModeControl( (ACC_MCTL_MODE(ACC_MODE_MEASURE) | ACC_MCTL_GLVL(ACC_RANGE_2G) ));
}
2.1、setModeControl()
static void setModeControl(uint8_t mctl)
{
uint8_t buf[2];
buf[0] = ACC_ADDR_MCTL;
buf[1] = mctl;
I2CWrite(ACC_I2C_ADDR, buf, 2);
}
2.1.1、ACC_ADDR_MCTL
#define ACC_ADDR_MCTL 0x16
2.1.2、ACC_I2C_ADDR
#define ACC_I2C_ADDR (0x1D << 1)
2.1.3、I2CWrite()
void I2CWrite(uint8_t addr, uint8_t* buf, uint32_t len)
{
I2CAddr = addr;
I2CMasterBuffer = buf;
I2CWriteLength = len;
I2CReadLength = 0;
I2CEngine();
I2CWriteLength = I2CWriteLength;
}
2.2、ACC_MCTL_MODE()
#define ACC_MCTL_MODE(m) ((m) << 0)
2.3、ACC_MCTL_GLVL()
#define ACC_MCTL_GLVL(g) ((g) << 2)
3、acc_read(&x, &y, &z);
/******************************************************************************
*
* Description:
* Read accelerometer data
*
* Params:
* [out] x - read x value
* [out] y - read y value
* [out] z - read z value
*
*****************************************************************************/
void acc_read (int8_t *x, int8_t *y, int8_t *z)
{
uint8_t buf[1];
/* wait for ready flag */
while ((getStatus() & ACC_STATUS_DRDY) == 0);
/*
* Have experienced problems reading all registers
* at once. Change to reading them one-by-one.
*/
buf[0] = ACC_ADDR_XOUT8;
I2CWrite(ACC_I2C_ADDR, buf, 1);
I2CRead(ACC_I2C_ADDR, buf, 1);
*x = (int8_t)buf[0];
buf[0] = ACC_ADDR_YOUT8;
I2CWrite(ACC_I2C_ADDR, buf, 1);
I2CRead(ACC_I2C_ADDR, buf, 1);
*y = (int8_t)buf[0];
buf[0] = ACC_ADDR_ZOUT8;
I2CWrite(ACC_I2C_ADDR, buf, 1);
I2CRead(ACC_I2C_ADDR, buf, 1);
*z = (int8_t)buf[0];
}
3.1、getStatus()
static uint8_t getStatus(void)
{
uint8_t buf[1];
buf[0] = ACC_ADDR_STATUS;
I2CWrite(ACC_I2C_ADDR, buf, 1);
I2CRead(ACC_I2C_ADDR, buf, 1);
return buf[0];
}
3.2、I2CWrite()
3.3、I2CRead()

相关文章推荐
- [Linux项目实践] 物联网单板测试之任务三:OLED菜单控制LED
- [Linux项目实践] 物联网单板测试之任务一:实现流水灯
- [Linux项目实践] 物联网单板测试之任务五:ZigBee Module之ZigBee_Test
- [Linux项目实践] 物联网单板测试之任务四:光敏电阻
- [Linux项目实践] 物联网单板测试之任务三:OLED菜单控制LED
- [Linux项目实践] 物联网单板测试之任务七:RFID之RFID_Test
- [Linux项目实践] 物联网单板测试之任务五:ZigBee Module之Fuction
- [Linux项目实践] 物联网单板测试之任务二:操作风扇
- [Linux项目实践] 物联网单板测试之任务五:ZigBee Module之Transfer
- [Linux项目实践] 物联网单板测试:OLED Dis_Menu
- [Linux项目实践] 物联网单板测试:LPC11C14 IIC_Init
- [Linux项目实践] 物联网单板测试:OLED Dis_Menu
- Linux企业级项目实践之网络爬虫(23)——系统测试:找出系统中的bug
- Linux企业级项目实践之网络爬虫(23)——系统测试:找出系统中的bug
- 实践作业2:黑盒测试实践(小组作业)每日任务记录1
- 项目一 任务4:linux运维职业生涯规划
- 项目二 任务五 管理Linux系统的用户与用户组
- 利用Linux中的crontab实现分布式项目定时任务
- 嵌入式Linux利用Wifi搭建无线服务器(物联网实践之无线网关)
- 实践作业1:测试管理工具实践(小组作业)每日任务记录1