导航应用软件开发平台--SNE介绍
2011-06-07 10:43
381 查看
近年来,在汽车业和智能交通双重驱动下,车载导航应用产业迅速发展。目前先进的车载导航系统结合了 GPS 全球定位技术,地理信息系统(GIS)技术和现的代计算机技术,实现车辆的实时定位、智能导航,使车辆在陌生的地理环境中顺利通行,极大提高了车辆的运行效率和安全,减轻了驾驶员的工作强度,使驾驶员能够准确及时地控制车辆到达预定的目的地。
车载导航是地理信息技术在大众信息化的方面的主要应用方向,北京超图软件股份有限公司依托中国科学院的科技优势,立足技术创新,在GIS行业走出一条自己特色的路线。SuperMap Navigation Engine(以下简称为SNE)(如图)是超图公司面向导航应用系统的二次开发商推出的第一代导航应用软件开发平台。SNE充分运用了超图在GIS领域的先进技术积累,创新地拓展了GIS在导航领域的发展应用,产品功能涵盖地图浏览、地图操作、POI查询、路径规划、定位导航等。SNE以类库的方式向用户提供导航产品的强大功能,并且,SNE 产品包提供一个基于SNE 开发的功能完整的导航应用系统(SuperNavigator)(如图),该系统完全是用Win32的程序开发的,用户可以在此系统的框架之上轻松进行产品功能拓展或自定义开发,因此,SNE是一款非常适用于专业导航应用系统快捷开发的导航应用开发平台。
SNE 基于超图共相式GIS(Universal GIS)的架构开发,具有支持多种操作系统、多种集成开发环境和多种CPU类型的能力;SNE 的底层数据格式完全支持《车载导航电子地图应用存储格式》国家标准,从而保证了引擎的开放性和效率,并且SNE 的数据格式具有广泛的数据兼容性。因此,基于SNE 开发导航应用软件,用户可以自由发挥其在不同操作系统、硬件平台、开发语言或集成开发环境上的技术优势,从而专注于系统外围功能的完善与升级,并且SNE 的标准数据格式有效解决了导航数据的共享难题,保证用户可以放心使用不同数据厂商的地图数据。
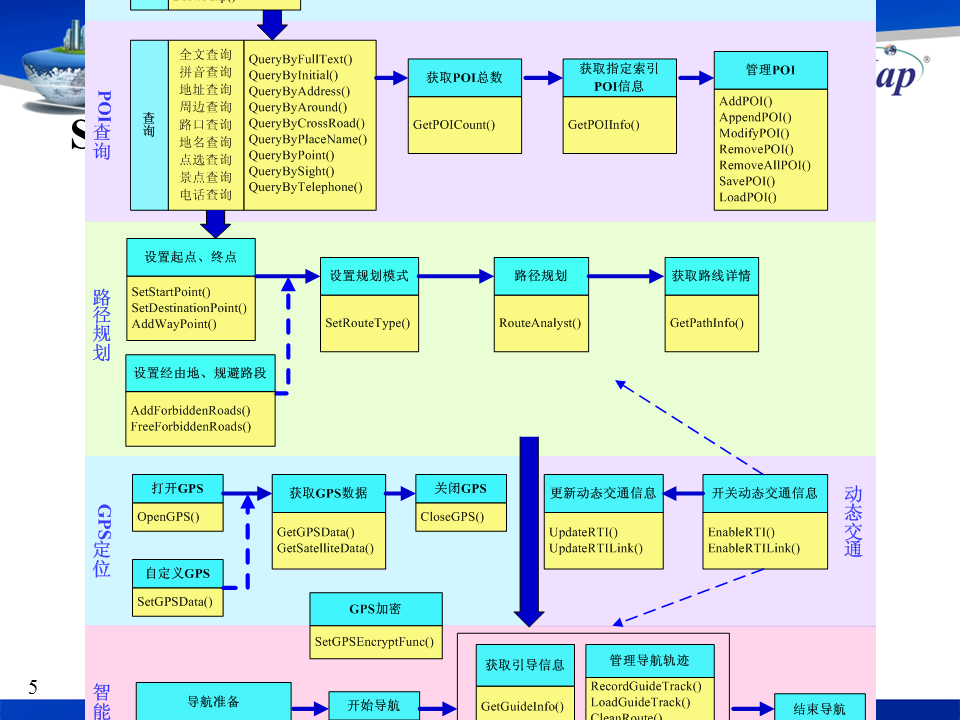
SNE共由19个子模块组成,按照功能将这些模块划分为三个层次:基础层、地图可视化层和导航应用层,它们之间的关系如图所示。

图 : SNE架构图
图中蓝色标示的模块为共相式GIS基础模块,其他各色标示分别代表一类引擎。
→ 共相式GIS基础模块:定义基本数据结构、基本算法、地图显示的基本流程及导航要素基本类型等。该模块编译生成的库文件为Basic.dll/.lib。
→ 导航数据引擎:基于共相式GIS的数据引擎开发,负责管理超图导航数据(NDF),主要是实现NDF格式的数据读、数据查询等操作。该模块编译生成的库文件为NdfEngine.sdx/.lib。
→ GDI显示引擎:基于共相式GIS的显示引擎开发,负责NDF 格式的导航数据在Windows操作系统上的显示。该模块编译生成的库文件为WGraphics.uge/.lib。
→ 高速影像引擎:负责超图高速影像数据SIT(SuperMap Image Tower)的读、显示等操作。该模块编译生成的库文件为SuSitEngine100.sdx/.lib。
→ GPS模块:处理与GPS信号接收、协议解析以及读数据等相关的工作。该模块编译生成的库文件为GPS.dll/.lib。
→ 路径规划引擎:负责在多层的道路拓扑网络数据之间进行跨层搜索,实现有条件的最优路径规划。该模块编译生成的库文件为RouteAnalyst.dll/.lib。
→ 引导引擎:负责提供行车过程中的引导信息,实现全程智能导航,包括语音提示、三维路口放大图等。该模块编译生成的库文件为GuideEngine.dll/.lib。
QQ 1650870015




















车载导航是地理信息技术在大众信息化的方面的主要应用方向,北京超图软件股份有限公司依托中国科学院的科技优势,立足技术创新,在GIS行业走出一条自己特色的路线。SuperMap Navigation Engine(以下简称为SNE)(如图)是超图公司面向导航应用系统的二次开发商推出的第一代导航应用软件开发平台。SNE充分运用了超图在GIS领域的先进技术积累,创新地拓展了GIS在导航领域的发展应用,产品功能涵盖地图浏览、地图操作、POI查询、路径规划、定位导航等。SNE以类库的方式向用户提供导航产品的强大功能,并且,SNE 产品包提供一个基于SNE 开发的功能完整的导航应用系统(SuperNavigator)(如图),该系统完全是用Win32的程序开发的,用户可以在此系统的框架之上轻松进行产品功能拓展或自定义开发,因此,SNE是一款非常适用于专业导航应用系统快捷开发的导航应用开发平台。
SNE 基于超图共相式GIS(Universal GIS)的架构开发,具有支持多种操作系统、多种集成开发环境和多种CPU类型的能力;SNE 的底层数据格式完全支持《车载导航电子地图应用存储格式》国家标准,从而保证了引擎的开放性和效率,并且SNE 的数据格式具有广泛的数据兼容性。因此,基于SNE 开发导航应用软件,用户可以自由发挥其在不同操作系统、硬件平台、开发语言或集成开发环境上的技术优势,从而专注于系统外围功能的完善与升级,并且SNE 的标准数据格式有效解决了导航数据的共享难题,保证用户可以放心使用不同数据厂商的地图数据。
SNE共由19个子模块组成,按照功能将这些模块划分为三个层次:基础层、地图可视化层和导航应用层,它们之间的关系如图所示。
图 : SNE架构图
图中蓝色标示的模块为共相式GIS基础模块,其他各色标示分别代表一类引擎。
→ 共相式GIS基础模块:定义基本数据结构、基本算法、地图显示的基本流程及导航要素基本类型等。该模块编译生成的库文件为Basic.dll/.lib。
→ 导航数据引擎:基于共相式GIS的数据引擎开发,负责管理超图导航数据(NDF),主要是实现NDF格式的数据读、数据查询等操作。该模块编译生成的库文件为NdfEngine.sdx/.lib。
→ GDI显示引擎:基于共相式GIS的显示引擎开发,负责NDF 格式的导航数据在Windows操作系统上的显示。该模块编译生成的库文件为WGraphics.uge/.lib。
→ 高速影像引擎:负责超图高速影像数据SIT(SuperMap Image Tower)的读、显示等操作。该模块编译生成的库文件为SuSitEngine100.sdx/.lib。
→ GPS模块:处理与GPS信号接收、协议解析以及读数据等相关的工作。该模块编译生成的库文件为GPS.dll/.lib。
→ 路径规划引擎:负责在多层的道路拓扑网络数据之间进行跨层搜索,实现有条件的最优路径规划。该模块编译生成的库文件为RouteAnalyst.dll/.lib。
→ 引导引擎:负责提供行车过程中的引导信息,实现全程智能导航,包括语音提示、三维路口放大图等。该模块编译生成的库文件为GuideEngine.dll/.lib。
QQ 1650870015

相关文章推荐
- 移动应用开发平台介绍
- AdView 团队核心成员介绍 android ios应用开发主流平台
- Symbian 应用软件开发、测试与 S60 平台安全常见问题问答
- 高德集团面向行业的导航二次开发平台介绍
- 新一代可视化软件集成开发平台介绍
- ICU4C 介绍: C/C++ 平台强大的国际化应用开发组件
- CZTZ-JavaEE开源应用开发平台介绍之三
- Symbian 应用软件开发、测试与 S60 平台安全常见问题问答
- CZTZ-JavaEE开源应用开发平台介绍之三
- 实现软件工厂化开发的Aspx应用开发平台发布了
- Symbian 应用软件开发、测试与 S60 平台安全常见问题问答
- SAP企业移动平台开发探索系列2 – 苹果手机程序多个页面导航的应用
- 实现软件工厂化开发的Aspx应用开发平台发布了
- AgileEAS.NET应用开发平台介绍
- cWeb开发框架,基于asp.net的cWeb应用开发平台介绍(一)
- GPS导航软件开发/GPS车辆监控定位平台开发/GPS软件项目承接、开发定制
- 新一代软件集成开发平台——Trufun Kant Studio 2008产品介绍
- 基于DotNet构件技术的企业级敏捷软件开发平台 - AgileEAS.NET平台开发指南 - 应用部署
- 介绍一个简单的数据库开发平台——mcis应用服务器中间件
- 基于DotNet构件技术的企业级敏捷软件开发平台 - AgileEAS.NET - 应用在线演示/例子