RoseRT 中的 Transition 状态迁移,写给新手
2009-11-03 19:19
134 查看
在开始介绍之前,先说点别的,我们刚进公司的那会,公司要对我们进行一些技术培训,而这些培训又外包了给外面的公司的,其中有一项就是RoseRT,在说了很多无关痛痒的东西之后,他要给我们演示下用 RoseRT 如何来实现一个工程,当然是大家都熟悉不能在熟悉的 HelloWorld 了。当然这么简单的工程是没有可能出错了的,不过接下来,他试图给我们讲解一下状态的迁移,决定在输出一次 Hello World,在状态图中他又拖了一个状态,然后用线给链接好,再写好代码之后,编译,运行,可是无论如何只有一个Hello World,第二个怎么也不出来。
我说这些倒不是为了说他什么,因为他的那个错误我也犯了,我也觉得到了一个状态之后,这个状态完成了就因该自动去下一个状态,不过事实上并不是那么简单的。
如果大家仔细观察,应该会发现,其实你将线连好之后,中间是有缺口的,不是一条完整的直线
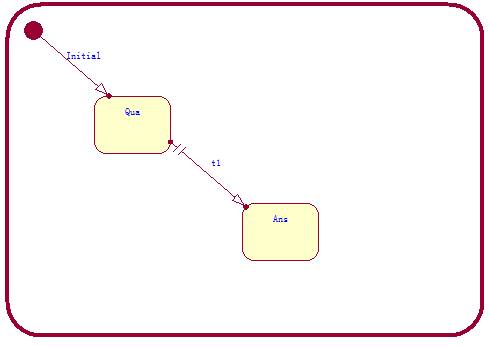
这就表示从Qua还是无法到达Ans这个状态的。
那么如何来实现状态的迁移呢?
大家双击这条线之后会发现有个 Trigger 栏, Trigger 触发器,对了!RoseRT中的状态迁移是要靠触发的,这种触发来源很多,有来自定时器的,有来自系统的,有来自程序本身的,也有可能来自外部的,随着你用RoseRT开发的越多,就回发现越多可以触发状态迁移的Trigger,当然我们今天就只举一个简单的列子,定时器触发。
首先到End Ports中建了一个timer:

然后到打开刚才的那个Trigger窗口,再 Insert 一个触发器,选择我们刚才建立的那个timer,Signal 就选择 timeout,然后点击确定。
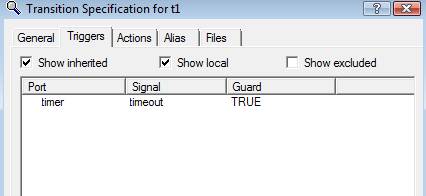
可以看到的那条线已经直了。然后在Qua中加入以下
timer. informin(RTTimespec(2,0)) 代码 ,这是一个RoseRT自带的库函数,设置定时器用的,具体使用大家日后在学习吧。
然后,写好其他相应的代码,因为都比较简单,不超两行代码我就不演示了,编译运行。

定时器时间到了之后,从RoseRT中看到状态的迁移。

这个演示相对来说是很简单的,正常情况下,一个较大的程序是很多个Capsule相互之间发送消息,通过不断来状态迁移来完成一系列的流程。
我说这些倒不是为了说他什么,因为他的那个错误我也犯了,我也觉得到了一个状态之后,这个状态完成了就因该自动去下一个状态,不过事实上并不是那么简单的。
如果大家仔细观察,应该会发现,其实你将线连好之后,中间是有缺口的,不是一条完整的直线
这就表示从Qua还是无法到达Ans这个状态的。
那么如何来实现状态的迁移呢?
大家双击这条线之后会发现有个 Trigger 栏, Trigger 触发器,对了!RoseRT中的状态迁移是要靠触发的,这种触发来源很多,有来自定时器的,有来自系统的,有来自程序本身的,也有可能来自外部的,随着你用RoseRT开发的越多,就回发现越多可以触发状态迁移的Trigger,当然我们今天就只举一个简单的列子,定时器触发。
首先到End Ports中建了一个timer:
然后到打开刚才的那个Trigger窗口,再 Insert 一个触发器,选择我们刚才建立的那个timer,Signal 就选择 timeout,然后点击确定。
可以看到的那条线已经直了。然后在Qua中加入以下
timer. informin(RTTimespec(2,0)) 代码 ,这是一个RoseRT自带的库函数,设置定时器用的,具体使用大家日后在学习吧。
然后,写好其他相应的代码,因为都比较简单,不超两行代码我就不演示了,编译运行。
定时器时间到了之后,从RoseRT中看到状态的迁移。
这个演示相对来说是很简单的,正常情况下,一个较大的程序是很多个Capsule相互之间发送消息,通过不断来状态迁移来完成一系列的流程。

相关文章推荐
- 写给新手程序员的一封信
- 转载:陈浩博客 写给新手程序员的一封信
- TCP状态迁移
- 面向矩阵的编程——【转帖】写给matlab新手
- 写给在Java和.net中徘徊的新手
- TCP状态迁移,CLOSE_WAIT & FIN_WAIT2 的问题
- 写给Linux内核新手-关于Linux内核学习的误区
- 新用户如何获得阿里云优惠怎么才能省钱-写给阿里云新手
- [MySQL FAQ]系列 -- 写给新手:学会找到问题所在
- [转载]写给Linux内核新手
- [MATLAB]写给matlab新手的几句话
- 写给Linux内核新手-关于Linux内核学习的误区(转载)
- 《写给程序员新手的话——(4)一个优秀程序员应具备的特质》
- 写给新手的ASP常见问题~~
- 状态迁移法
- Silverlight+WCF 新手实例 象棋 房间状态更新(二十)
- [置顶] 写给新手程序员的一封信
- 写给新手程序员的一封信
- hbase 集群迁移:Region still in transition, waiting for it to become assigned: