【仿真】Carla之Docker 运行 及 渲染相关 [6]
参考与前言
carla官方对于docker 运行的描述:
Docker的使用:[暂时没贴]
相关已知issue,欢迎补充
使用的初衷是:因为收集数据的时候,想开多个carla,但是一个carla 3-4G显存,奈何我的电脑就仅仅6G显存 1660Ti,所以就萌生了这个想法。但是呢 途中发现:
- Carla 0.9.10.1 的版本 docker可以运行 但是必须有DISPLAY的设备 不然如果DISPLAY给空的话 就会没有 → 但是呢 你在本地运行的时候 可以DISPLAY为空 也可以正常运行
- Carla 0.9.12 的版本 就可以运行做到offscreen (后面会解释这个词)
回到开始,所以呢 主要就是介绍怎样在docker中运行carla,以及这些的作用,好处等,前面介绍了较多关于渲染的东西,要是觉得烦,直接目录跳转docker处
1. 渲染 Rendering
off-screen & no-rendering
官方文档:
首先我们要知道 off-screen 和 no-rendering各自的意义是什么,从字面上,一个是离屏但是渲染继续,一个是直接不做图形渲染
No-rendering mode: 虚幻引擎不会做任何渲染,图形学方面的计算都是没有的,所以基于GPU的所有传感器返回的是空数据
它有助于在非常高的频率下进行大量的交通模拟和道路行为。
Off-screen mode: 虚幻引擎还是正常工作,渲染都在计算中,传感器也会返回值,只是没有display 显示选项了而已
那什么时候用什么呢?正常其实如果还在debug 调试阶段,其实一般都是需要display 做上帝俯视视角掌控一下全局的
- 对于你不需要传感器数据,只是用来做交通流的仿真的时候,no-rendering mode是一个不错的选择,例如:我只是看看我基于ground truth (不基于传感器感知) 的agent的整体运行路径的表现效果,比如撞车等,可以使用这种模式,十分迅速
- 对于off-screen呢 主要是觉得显示界面有的烦,就可以配合 tmux 进行搭配,这样主机只要不关机/ 服务器不关机 这都在继续运行 终端退出了也不碍事,也不会出现误触关掉
所以,了解了原理后,如何开启各个所需模式呢?
off screen
0.9.12及之后的版本 只有有renderoffscreen,也就是离屏模式:
./CarlaUE4.sh -RenderOffScreen
0.9.11及之前的 就可以使用opengl,把DISPLAY 给空就行(但这步在docker并不适用)
# Linux DISPLAY= ./CarlaUE4.sh -opengl
vulkan的步骤请见官方文档,需要安装驱动等其他sudo所需权限apt install等
no rendering
可以在py代码里读取到world后设置:
settings = world.get_settings() settings.no_rendering_mode = True world.apply_settings(settings) ... settings.no_rendering_mode = False world.apply_settings(settings)
也可以单独开一个终端窗口 通过官方提供的 config.py 进行设置
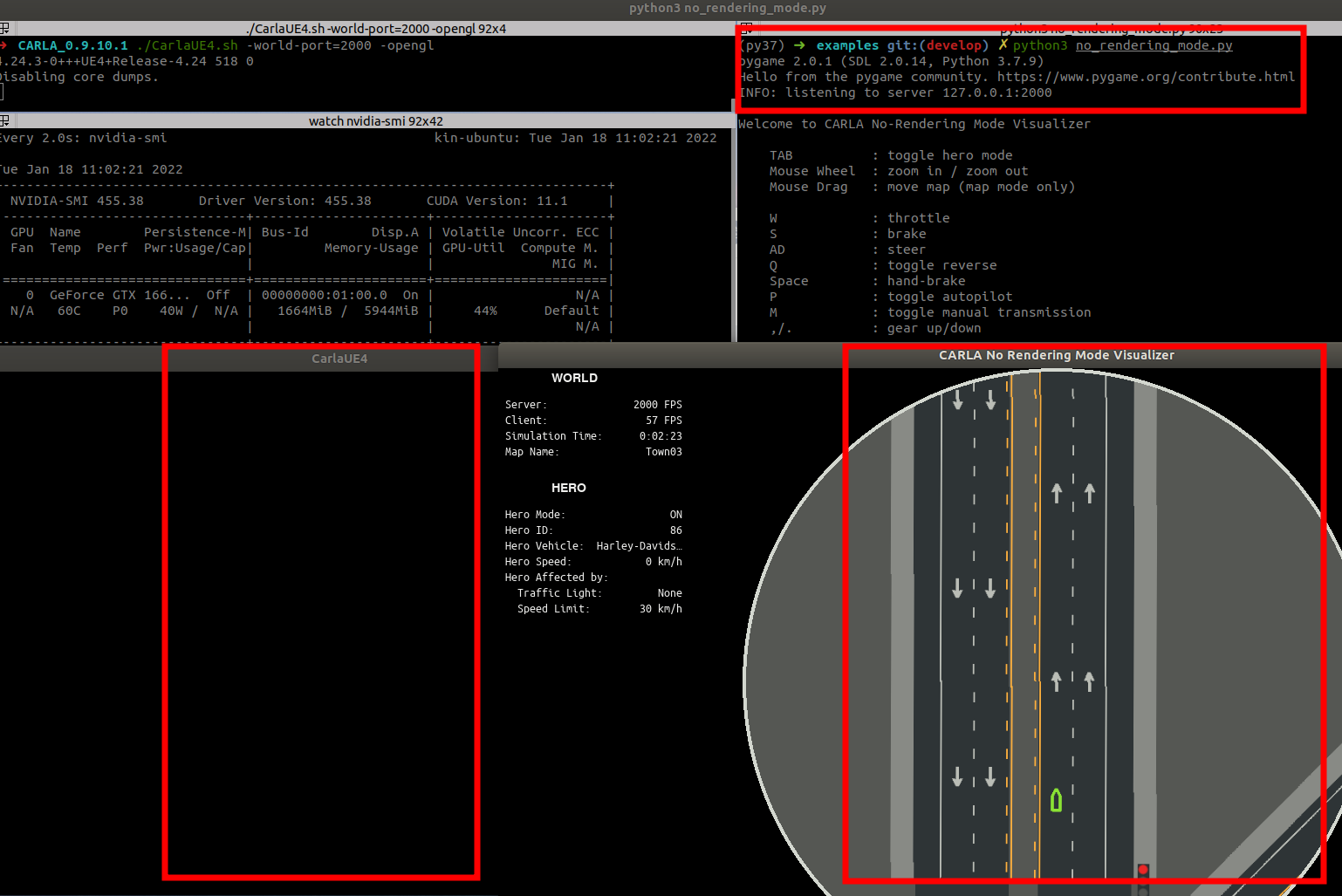
cd PythonAPI/util && python3 config.py --no-rendering cd PythonAPI/util && python3 config.py --rendering cd PythonAPI/examples && python3 no_rendering_mode.py
前两种应该知道在说什么,如图所示(1是带渲染的,2是不带渲染的 注意这种模式下界面也会变黑,传感器也都没有数据):

后一种是一种鸟瞰图形式,也是无渲染 节约型的,如下图所示:
渲染质量
首先 如果你不追求收集的图片传感器的质量的话,为了提高效率 使用低质量渲染也是一种不错的选择,注意 这点会影响天空的渲染,更多可以自己尝试一下

左边是低质量,右边是正常epic质量
./CarlaUE4.sh -quality-level=Low ./CarlaUE4.sh -quality-level=Epic
另外在Carla 0.9.12之前的版本,还有opengl和vulkan的选择,我记得我在哪个issue里读到过 opengl的渲染没有vulkan的好,有时候屏幕/传感器收到的数据会出现黑点
而0.9.12之后就只留下了vulkan的渲染模式
2. Docker 中运行
首先 docker 安装,基本指令等等等 就不讲了 前面的部分放了参考链接,很多教程也可熟悉
大概是这样一幅图,感觉还是看图一目了然在干什么事:

摘自 carla github 官方的老0.8版本的repo
https://github.com/carla-simulator/data-collector
pull/build
此处先以官方为准,讲简洁型pull方案,build等后面补充吧
因为可以两个docker net对上了 就能连上,所以carla完全作为多个容器开着,对好自己的另一个运行的环境的端口就行
docker pull,其实和 git clone 异曲同工之处
# Pull the latest image docker pull carlasim/carla:latest # Pull a specific version docker pull carlasim/carla:0.9.12
- carlasim 用户名
- carla 用户名下有的repo名
- 0.9.12 打上了tag的版本,latest 直接拉取最新的(现在是0.9.13)
版本与渲染
根据前面介绍过了,我们知道各个版本支持的渲染模式,在docker中 主要影响可以运行的条件
- 0.9.12 supports only Vulkan
- 0.9.7+ supports both Vulkan and OpenGL.
带显示 0.9.10.1
仅老版本 如0.9.10.1,我测试了一下carla 0.9.12不太行... 同0.9.10.1无法做offscreen一致,也没啥报错就是不运行而已
比如,注意
--net一定要连回来,不然rpc port对不上号,可自定义
# 源于官网指令 docker run -e DISPLAY=$DISPLAY --net=host --gpus all --runtime=nvidia carlasim/carla:<version> /bin/bash docker run -e DISPLAY=$DISPLAY -it --net=host --gpus all carlasim/carla:0.9.10.1 /bin/bash 。、CarlaUE4.sh -opengl -world-port=2000
这一条就是 用现在所运行docker的机子的屏幕,比如你电脑运行的docker,那显示就在你电脑上,如图:

关于端口映射更多可见docker 官网文档:
关于gpu对容器可视选择等,也可见官网文档:
Runtime options with Memory, CPUs, and GPUs
不带显示 0.9.12
仅新版本 如0.9.12,我测试了一下carla 0.9.10.1 不太行... 同0.9.12无法做offscreen一致,也没啥报错就是不运行而已
docker run --privileged --gpus all \ --net=host -v /tmp/.X11-unix:/tmp/.X11-unix:rw \ carlasim/carla:0.9.12 /bin/bash \ ./CarlaUE4.sh -RenderOffScreen docker run --privileged -it --gpus all --net=host -v /tmp/.X11-unix:/tmp/.X11-unix:rw carlasim/carla:0.9.12 /bin/bash ./CarlaUE4.sh -world-port=2000 -RenderOffScreen
运行实时图:可以看到docker里开的carla并没有显示,但是一般通过显存可以开出来正在运行中,然后我们在本机上通过port连过去,注意两边的carla库版本要一致... 我是删了我的0.9.10.1的,又pip3 install了一下才能同上Python API的库的

对于0.9.11及之前的版本:
sudo docker run --privileged --gpus all --net=host -e DISPLAY=$DISPLAY -e SDL_VIDEODRIVER=x11 -v /tmp/.X11-unix:/tmp/.X11-unix:rw carlasim/carla:0.9.11 /bin/bash ./CarlaUE4.sh -vulkan <-additonal-carla-flags>
docker run -e DISPLAY=$DISPLAY --net=host --gpus all --runtime=nvidia carlasim/carla:<version> /bin/bash CarlaUE4.sh -opengl <-additonal-carla-flags>
事实证明 有display确实,但是offscreen不能像在本机运行的那样... 在docker 容器里直接如下指令会不启动carla 虽然也没啥错误
# Linux DISPLAY= ./CarlaUE4.sh -opengl
对了xdg-user-dir: not found 可以就当没看见说的是你没有Documents这些文件上啥的 不要紧

3. 服务器运行
这个主要针对各自服务器,此处记录一下遇到的问题:
failed to establish dbus connection

然后看了一下5上的 2080Ti emmm,Driver版本:NVIDIA-SMI 495.44 Driver Version: 495.44 CUDA Version: 11.5
解决办法:换一个其他GPU和driver版本的服务器,我换了一个就没这个问题了
channel 3: open failed: connect failed: Connection refused
这个得找服务器主管 给你开端口权限了... emmm
总结
所以这么看来,如果自己机子足够强,也不用docker,直接不同的rpc port运行起来,然后各个连过去,就是一边干活一边运行的时候,一个不小心 就超内存和显存了,然后就炸了,所以记得设好checkpoint → 别问我咋知道... 都是abort的后文了
另外 版本越新,bug越少... 对于carla PP口头禅:确实

- Docker整理之Docker运行容器相关(二)
- 运行第一个 Service - 每天5分钟玩转 Docker 容器技术(96)
- 如何查看nginx运行状态及相关属性说明
- 构建 arm-linux 仿真运行环境 (skyeye + arm-linux + NFS)
- 【《Real-Time Rendering 3rd》 提炼总结】(十) 第十一章 · 非真实感渲染(NPR)相关技术总结
- cocos2d-x(6):渲染顺序ZORDER和Tag相关学习
- docker生产相关实战
- Docker解析及轻量级PaaS平台演练(四)--Fig相关介绍
- 开发可运行于Docker上的Spring Boot应用
- 简单几步搭建一个基于Docker的Tomcat运行环境!
- docker上运行mysql服务
- TDOA定位中的广义相关(Generalized Cross Correlation)算法仿真
- spring Boot 应用通过Docker 来实现构建、运行、发布流程
- Windows10下的docker安装与入门 (三) 创建自己的docker镜像并且在容器中运行它
- 容器(docker)中运行java需关注的几个小问题
- 使用Docker创建JavaWeb运行环境(亲测)
- Docker运行grafana与zabbix结合
- Docker相关笔记
- 004_Docker运行流程
- 在(Docker里的)Jenkins里运行Docker