计算回形针方向
2021-06-07 12:43
267 查看
摘要
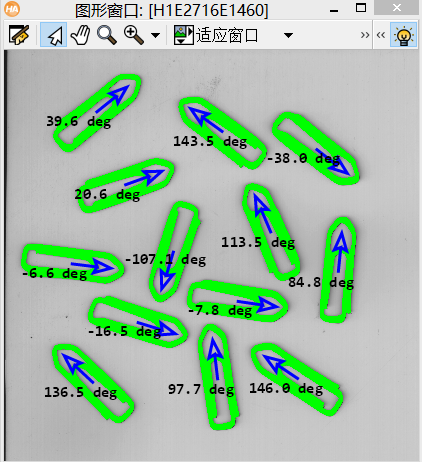
本篇来用OpenCV实现Halcon中一个计算回形针方向的实例clip.hdev,并构建了计算角度函数和画箭头函数,得到的角度与halcon例程相差无多。
原图如下:
Halcon代码比较简单,这里也贴出来:
dev_update_window ('off')
read_image (Clip, 'clip')
get_image_size (Clip, Width, Height)
dev_close_window ()
dev_open_window (0, 0, Width / 2, Height / 2, 'black', WindowID)
dev_display (Clip)
set_display_font (WindowID, 14, 'mono', 'true', 'false')
disp_continue_message (WindowID, 'black', 'true')
stop ()
binary_threshold (Clip, Dark, 'max_separability', 'dark', UsedThreshold)
connection (Dark, Single)
select_shape (Single, Selected, 'area', 'and', 5000, 10000)
dev_set_draw ('fill')
dev_set_colored (12)
dev_display (Selected)
disp_continue_message (WindowID, 'black', 'true')
stop ()
dev_display (Clip)
dev_set_color ('green')
dev_display (Selected)
orientation_region (Selected, Phi)
area_center (Selected, Area, Row, Column)
dev_set_line_width (3)
dev_set_draw ('margin')
Length := 80
dev_set_color ('blue')
disp_arrow (WindowID, Row, Column, Row - Length * sin(Phi), Column + Length * cos(Phi), 4)
disp_message (WindowID, deg(Phi)$'3.1f' + ' deg', 'image', Row, Column - 100, 'black', 'false')
dev_update_window ('on')
可以看到halcon的思路是:
① 读取图像
② 二值化
③ 根据面积剔除非回形针的region
④ 计算每个region的方向和中心
⑤ 画箭头,结果输出
但是opencv中没有计算角度的函数和画箭头的函数,因此需要我们自己定义。
opecv实现:
(一)构建角度计算函数
double calLineAngle(Point&ptStrat, Point&ptEnd)
{
const double PI = 3.1415926;
double angle = 0;
if (ptStrat.x==ptEnd.x)
{
angle = 90;
}
else if (ptStrat.y==ptEnd.y)
{
angle = 0;
}
else
{
angle = atan((double)(ptEnd.y - ptStrat.y) / (ptEnd.x - ptStrat.x))*(180 / PI);
if (angle<0)
{
angle = abs(angle);
}
else if (angle>0)
{
angle = 180 - angle;
}
if (ptEnd.y-ptStrat.y>0&&ptEnd.x-ptStrat.x)
{
angle = angle - 180;
}
}
return angle;
}
atan 和 atan2 都是求反正切函数,如:有两个点 point(x1,y1), 和 point(x2,y2);那么这两个点形成的斜率的角度计算方法分别是:
- float angle = atan( (y2-y1)/(x2-x1) );
- float angle = atan2( y2-y1, x2-x1 );
atan 和 atan2 区别:
1:参数的填写方式不同;
2:atan2 的优点在于 如果 x2-x1等于0 依然可以计算,但是atan函数就会导致程序出错;
(二)构建画箭头函数
void drawArrow(Mat&img, Point pStart, Point pEnd, int len, int alpha, Scalar color, int thickness, int lineType)
{
const double PI = 3.1415926;
Point arrow;
//计算theat角
double angel = atan2((double)(pStart.y - pEnd.y), (double)(pStart.x - pEnd.x));
line(img, pStart, pEnd, color, thickness, lineType);
//计算箭角边的另一端的端点位置(上面的还是下面的要看箭头的指向,即pStart和pEnd的位置)
arrow.x = pEnd.x + len * cos(angel + PI * alpha / 180);
arrow.y = pEnd.y + len * sin(angel + PI * alpha / 180);
line(img, pEnd, arrow, color, thickness, lineType);
arrow.x = pEnd.x + len * cos(angel - PI * alpha / 180);
arrow.y = pEnd.y + len * sin(angel - PI * alpha / 180);
line(img, pEnd, arrow, color, thickness, lineType);
}
(三)主函数
int main(int argc, char** argv)
{
double pointToLineDist(Point&pt, Point&lineStart, Point&lineEnd);
double calLineAngle(Point&ptStrat, Point&ptEnd);
void drawArrow(Mat&img, Point pStart, Point pEnd, int len, int alpha, Scalar color, int thickness, int lineType);
Mat src = imread("D:/opencv练习图片/回形针方向.png");
imshow("输入图像", src);
Mat gray, binary;
cvtColor(src, gray, COLOR_BGR2GRAY);
//阈值处理
threshold(gray, binary, 150, 255, THRESH_BINARY_INV);
imshow("二值化", binary);
//寻找轮廓
vector<vector<Point> > contours;
findContours(binary, contours, RETR_EXTERNAL, CHAIN_APPROX_NONE,Point());
cout << contours.size() << endl;
//轮廓分析,找到工件
for (size_t i = 0; i < contours.size(); ++i)
{
//计算轮廓大小
double area = contourArea(contours[i]);
if (area < 12000)continue;
double max_dist = 0;
Moments mm = moments(contours[i],false);
Point ptCenter = Point(mm.m10 / mm.m00, mm.m01 / mm.m00);
Point ptFarthest;
for (int j = 0; j < contours[i].size(); j++)
{
double distance = sqrt(pow(contours[i][j].x - ptCenter.x, 2) + pow(contours[i][j].y - ptCenter.y, 2));
if (distance>max_dist)
{
ptFarthest = Point(contours[i][j].x, contours[i][j].y);
max_dist = distance;
}
}
cout << max_dist << endl;
drawContours(src, contours, i, Scalar(0, 0, 255), 5, 8);
drawArrow(src, ptCenter, ptFarthest, 25, 30, Scalar(255,0,255), 3, 8);
double angle = calLineAngle(ptCenter, ptFarthest);
cout << angle << endl;
char strAngle[20];
sprintf_s(strAngle, "%0.1fdegree", angle);
putText(src, strAngle, ptCenter, FONT_HERSHEY_SIMPLEX, 0.8, Scalar(0, 255, 255), 2, 8);
}
imshow("结果", src);
waitKey(0);
return 0;
}

参考于:OpenCV与AI深度学习

相关文章推荐
- unity3d easytouch计算摇杆旋转角度以及摇杆八方向控制角色
- 计算汽车行驶的方向
- 【AI技术生态论】微信Plato高性能计算负责人于东海:图计算框架与深度学习结合、GNN是图计算框架的发展方向
- 云计算,我的技术使命与方向
- Head-up No-Limit Texas Hold'em 计算搜索空间一探 (AI方向)
- 云计算方向:向少数大型平台靠拢
- 【大数据学习之路】SparkSQL,mapreduce(大数据离线计算)方向学习(三)
- Opencv中计算梯度、梯度幅值以及梯度方向的相关函数
- 利用opencv函数计算图像的梯度幅度和梯度方向
- OpenCV中phase函数计算方向场
- 利用光流法计算人体运动的速度与方向
- 计算汽车行驶的方向
- LSD-SLAM(1)极线方向计算与推导
- 高性能计算发展方向略记
- unity3d easytouch计算摇杆旋转角度以及摇杆八方向控制角色
- 计算梯度幅值与方向
- 用HTML和javascript(JS)计算触屏手机手指滑动方向的演示
- 【大数据学习之路】SparkSQL,mapreduce(大数据离线计算)方向学习(一)
- Unity3D研究院之主角面朝方向一定区域内对象角度计算(四十五)
- 网格顶点方向的计算(一种新的面积加权方法)