pytorch中F.avg_pool1d()和F.avg_pool2d()的使用操作
F.avg_pool1d()数据是三维输入
input维度: (batch_size,channels,width)channel可以看成高度
kenerl维度:(一维:表示width的跨度)channel和输入的channel一致可以认为是矩阵的高度
假设kernel_size=2,则每俩列相加求平均,stride默认和kernel_size保持一致,越界则丢弃(下面表示1,2列和3,4列相加求平均)
input = torch.tensor([[1,1,1,1,1],[1,1,1,1,1],[0,0,0,1,1],[1,1,1,1,1],[1,1,1,1,1]]).unsqueeze(0).float() print(input) m = F.avg_pool1d(input,kernel_size=2) m tensor([[[1., 1., 1., 1., 1.], [1., 1., 1., 1., 1.], [0., 0., 0., 1., 1.], [1., 1., 1., 1., 1.], [1., 1., 1., 1., 1.]]]) tensor([[[1.0000, 1.0000], [1.0000, 1.0000], [0.0000, 0.5000], [1.0000, 1.0000], [1.0000, 1.0000]]])
假设kenerl_size=3,表示前3列相加求平均,后面的不足3列丢弃
input = torch.tensor([[1,1,1,1,1],[1,1,1,1,1],[0,0,0,1,1],[1,1,1,1,1],[1,1,1,1,1]]).unsqueeze(0).float() print(input) m = F.avg_pool1d(input,kernel_size=3) m tensor([[[1., 1., 1., 1., 1.], [1., 1., 1., 1., 1.], [0., 0., 0., 1., 1.], [1., 1., 1., 1., 1.], [1., 1., 1., 1., 1.]]]) tensor([[[1.], [1.], [0.], [1.], [1.]]]) input = torch.tensor([[1,1,1,1,1],[1,1,1,1,1],[0,0,0,1,1],[1,1,1,1,1],[1,1,1,1,1]]).unsqueeze(0).float() print(input) m = F.avg_pool1d(input,kernel_size=4) m tensor([[[1., 1., 1., 1., 1.], [1., 1., 1., 1., 1.], [0., 0., 0., 1., 1.], [1., 1., 1., 1., 1.], [1., 1., 1., 1., 1.]]]) tensor([[[1.0000], [1.0000], [0.2500], [1.0000], [1.0000]]])
假设stride=1每次移动一个步伐
input = torch.tensor([[1,1,1,1,1],[1,1,1,1,1],[0,0,0,1,1],[1,1,1,1,1],[1,1,1,1,1]]).unsqueeze(0).float() print(input) m = F.avg_pool1d(input,kernel_size=2,stride=1) m tensor([[[1., 1., 1., 1., 1.], [1., 1., 1., 1., 1.], [0., 0., 0., 1., 1.], [1., 1., 1., 1., 1.], [1., 1., 1., 1., 1.]]]) tensor([[[1.0000, 1.0000, 1.0000, 1.0000], [1.0000, 1.0000, 1.0000, 1.0000], [0.0000, 0.0000, 0.5000, 1.0000], [1.0000, 1.0000, 1.0000, 1.0000], [1.0000, 1.0000, 1.0000, 1.0000]]]) input = torch.tensor([[1,1,1,1,1],[1,1,1,1,1],[0,0,0,1,1],[1,1,1,1,1],[1,1,1,1,1]]).unsqueeze(0).float() print(input) m = F.avg_pool1d(input,kernel_size=4,stride=1) m tensor([[[1., 1., 1., 1., 1.], [1., 1., 1., 1., 1.], [0., 0., 0., 1., 1.], [1., 1., 1., 1., 1.], [1., 1., 1., 1., 1.]]]) tensor([[[1.0000, 1.0000], [1.0000, 1.0000], [0.2500, 0.5000], [1.0000, 1.0000], [1.0000, 1.0000]]])
F.avg_pool2d()数据是四维输入
input维度: (batch_size,channels,height,width)
kenerl维度:(二维:表示width的跨度)channel和输入的channle一致,如果数据是三维,则channel为1.(如果只写一个数n,kenerl=(n,n))
stride默认和kenerl一致,这是个二维的,所以在height和width上均和kenerl一致,越界同样丢弃。
跟cnn卷积一致
input = torch.tensor([[1,1,1,1,1],[1,1,1,1,1],[0,0,0,1,1],[1,1,1,1,1],[1,1,1,1,1]]).unsqueeze(0).float() print(input.size()) print(input) m = F.avg_pool2d(input,kernel_size=(4,4)) m torch.Size([1, 5, 5]) tensor([[[1., 1., 1., 1., 1.], [1., 1., 1., 1., 1.], [0., 0., 0., 1., 1.], [1., 1., 1., 1., 1.], [1., 1., 1., 1., 1.]]]) tensor([[[0.8125]]]) input = torch.tensor([[1,1,1,1,1],[1,1,1,1,1],[0,0,0,1,1],[1,1,1,1,1],[1,1,1,1,1]]).unsqueeze(0).float() print(input.size()) print(input) m = F.avg_pool2d(input,kernel_size=(4,4),stride=1) m torch.Size([1, 5, 5]) tensor([[[1., 1., 1., 1., 1.], [1., 1., 1., 1., 1.], [0., 0., 0., 1., 1.], [1., 1., 1., 1., 1.], [1., 1., 1., 1., 1.]]]) tensor([[[0.8125, 0.8750], [0.8125, 0.8750]]])
如果求列的平均kenerl=(1,5),此时默认stride=(1,5)
input = torch.tensor([[1,1,1,1,1],[1,1,1,1,1],[0,0,0,1,1],[1,1,1,1,1],[1,1,1,1,1]]).unsqueeze(0).float() print(input.size()) print(input) m = F.avg_pool2d(input,kernel_size=(1,5)) m torch.Size([1, 5, 5]) tensor([[[1., 1., 1., 1., 1.], [1., 1., 1., 1., 1.], [0., 0., 0., 1., 1.], [1., 1., 1., 1., 1.], [1., 1., 1., 1., 1.]]]) tensor([[[1.0000], [1.0000], [0.4000], [1.0000], [1.0000]]])
如果求行的平均kenerl=(5,1),此时默认stride=(5,1),用卷积的概念取思考
input = torch.tensor([[1,1,1,1,1],[1,1,1,1,1],[0,0,0,1,1],[1,1,1,1,1],[1,1,1,1,1]]).unsqueeze(0).float() print(input.size()) print(input) m = F.avg_pool2d(input,kernel_size=(5,1)) m torch.Size([1, 5, 5]) tensor([[[1., 1., 1., 1., 1.], [1., 1., 1., 1., 1.], [0., 0., 0., 1., 1.], [1., 1., 1., 1., 1.], [1., 1., 1., 1., 1.]]]) tensor([[[0.8000, 0.8000, 0.8000, 1.0000, 1.0000]]])
对于四维的数据,channel默认和输入一致
input=torch.randn(10,3,4,4) m=F.avg_pool2d(input,(4,4)) print(m.size()) torch.Size([10, 3, 1, 1])
补充:PyTorch中AdaptiveAvgPool函数解析
自适应池化(AdaptiveAvgPool1d):
对输入信号,提供1维的自适应平均池化操作 对于任何输入大小的输入,可以将输出尺寸指定为H*W,但是输入和输出特征的数目不会变化。
torch.nn.AdaptiveAvgPool1d(output_size) #output_size:输出尺寸
对输入信号,提供1维的自适应平均池化操作 对于任何输入大小的输入,可以将输出尺寸指定为H*W,但是输入和输出特征的数目不会变化。
# target output size of 5 m = nn.AdaptiveAvgPool1d(5) input = autograd.Variable(torch.randn(1, 64, 8)) output = m(input)
自适应池化(AdaptiveAvgPool2d):
class torch.nn.AdaptiveAvgPool2d(output_size)
对输入信号,提供2维的自适应平均池化操作 对于任何输入大小的输入,可以将输出尺寸指定为H*W,但是输入和输出特征的数目不会变化。
参数:
output_size: 输出信号的尺寸,可以用(H,W)表示H*W的输出,也可以使用耽搁数字H表示H*H大小的输出
# target output size of 5x7 m = nn.AdaptiveAvgPool2d((5,7)) input = autograd.Variable(torch.randn(1, 64, 8, 9)) # target output size of 7x7 (square) m = nn.AdaptiveAvgPool2d(7) input = autograd.Variable(torch.randn(1, 64, 10, 9)) output = m(input)
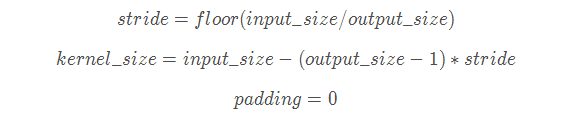
自适应池化的数学解释:

以上为个人经验,希望能给大家一个参考
您可能感兴趣的文章:- Pytorch自定义Dataset和DataLoader去除不存在和空数据的操作
- pytorch Dataset,DataLoader产生自定义的训练数据案例
- PyTorch实现重写/改写Dataset并载入Dataloader
- 一文弄懂Pytorch的DataLoader, DataSet, Sampler之间的关系
- PyTorch 解决Dataset和Dataloader遇到的问题
- PyTorch 如何自动计算梯度
- 我对PyTorch dataloader里的shuffle=True的理解
- pytorch 带batch的tensor类型图像显示操作
- 解决pytorch下只打印tensor的数值不打印出device等信息的问题
- Pytorch 如何查看、释放已关闭程序占用的GPU资源
- pytorch中的squeeze函数、cat函数使用
- Pytorch数据读取之Dataset和DataLoader知识总结

- 使用pytorch搭建AlexNet操作(微调预训练模型及手动搭建)
- elasticsearch聚合操作——本质就是针对搜索后的结果使用桶bucket(允许嵌套)进行group by,统计下分组结果,包括min/max/avg
- JAVA 使用哈希表操作数据库的例子 Using Hashtables to Store & Extract results from a Database.
- 使用ADO操作SQL SERVER 通过'OLE DB 访问 ACCESS 数据库 ,实现数据交换
- vc使用ADO操作数据库总结 选择自 CDrea 的 Blog
- 在ASP.NET 2.0中操作数据之十二:在GridView控件中使用TemplateField
- 用javascript操作xml-->Web设计中如何使用XML数据源对象(转载)
- 如何在VB中操作EXCEL(一段代码,两个可以使用的过程)
- 如何使用Java操作文本文件的方法详解 (转)
- 使用ADO操作数据库时一个好用的VARIANT类!
- 一个使用ASP.NET来操作COM的磁盘配额代码.
- 使用jdom操作xml数据,生成含Jtree的applet(转载 Jagie 原创 )
- 使用存储过程进行数据库操作
- 如何在VB中操作EXCEL(一段代码,两个可以使用的过程)
- [分际]如何使用EVENTLOG类操作日志
- 使用Java操作二进制文件
- opengl 的矩阵操作的使用方法
- 使用ADO操作数据库时一个好用的VARIANT类!
- 如何使用ASP进行打印操作
- 使用VS.NET2003操作SQLServer DTS.