STM32通信硬件 I2C
20.1关于 I2C
STM32F103系列的I²C控制器,可作为通信主机或从机,因此有四种工作模式可选择:主机发送模式、主机接收模式、从机发送模式、从机接收模式。
传输速度上,支持标准模式(Standard mode,最高速度100kHz)和快速模式(Fast mode,最高速度400kHz)。同时,还支持SMBus2.0(System Management Bus,系统管理总线)和PMBus (Power Management Bus,电源管理总线)。
I²C控制器结构如图 20.1.1 所示,可以看作四部分组成。
-
引脚:I²C协议只需要两个引脚(SDA和SCL),SMBA引脚仅用于SMBus模式的Alert引脚,通常不用管。
-
数据收发:主要涉及到数据寄存器(Data Register,DR)和数据移位寄存器(Data Shift Register,DSR)。
当发送数据时,将发送的字节写入DR寄存器,硬件会把DR中的字节搬到DSR中,然后在时钟信号的配 合下,把DSR最高位的数据放到数据线SDA上,并对DSR进行移位操作。
当接收数据时,数据控制器(Data Control)根据时钟信号,把SDA线上的高低电平转换为“1”或“0”的
数据,写到DSR的最低位,同时DSR移位操作,当接收完一个字节的8位数据后,把DSR中的数据搬到DR寄存器中。 -
时钟信号:时钟控制器(Clock Control)用于驱动同步时钟信号线SCL。通过配置时钟控制寄存器(ClockControl Register,CCR),可以调整SCL的频率。
-
控制逻辑:有两个控制寄存器(Control Register 1,CR1)和(Control Register 2,CR2)用于控制逻辑。通过它们可以触发起始和停止信号,做出ACK响应,配置外设时钟频率,开启DMA和中断的功能。同时控制逻辑的状态会反馈到(Status Register 1,SR1)和(Status Register 2,SR2)两个状态寄存器上,根据它们可以知道当前总线是否被占用,本机是主设备还是从设备,数据是否发送完毕等。

20.1.2 AP3426 介绍
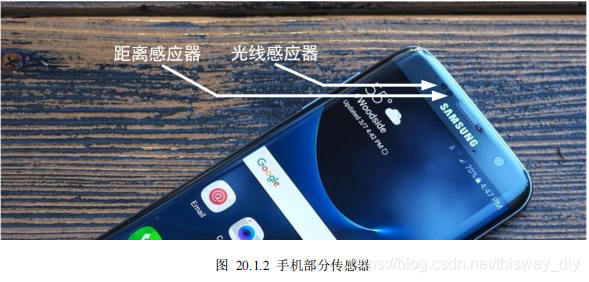
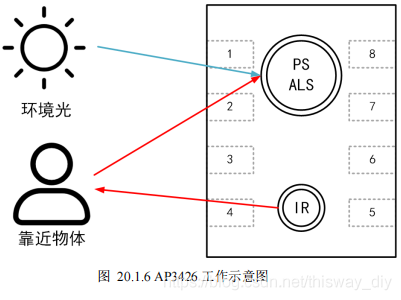
AP3426芯片集成了光强传感器(ALS:AmbientLight Sensor)、接近传感器(PS: Proximity Sensor)、红 外LED(IR LED),最常见的应用就是手机。当我们接听电话时,耳朵靠近手机前置扬声器附近,也就靠近了该传感器,此时距离传感器就告诉CPU可以关闭屏幕显示,以防误触。光强传感器能识别当前环境光,告诉CPU对应调节屏幕亮度,手机部分传感器如图 20.1.2 所示。
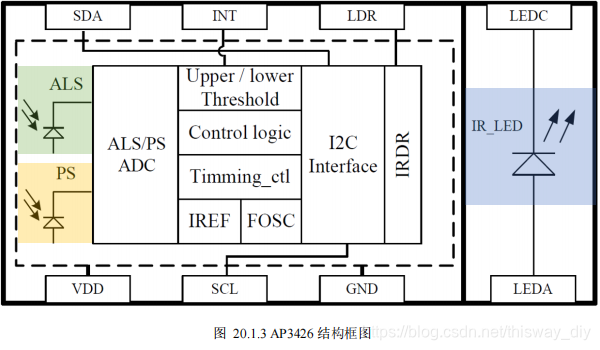
AP3426的结构如图 20.1.3 所示,左边两个光电二极管采集光照的强度,右边一个发光二极管发射940nm的红外光。
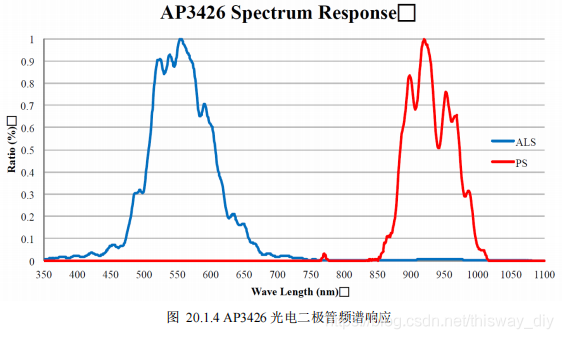
由图 20.1.4 可知,两个光电二极管的频谱响应,ALS光电二极管对450nm-700nm波长光有响应,PS光电二极管对850nm-1000nm波长的光有响应。
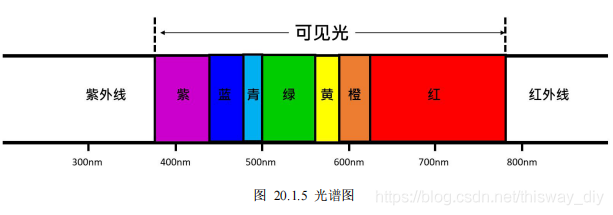
由图 20.1.5 可知,450nm-700nm波长的光在可见光范围内,而850nm-1000nm波长的光属于红外线。
在明亮环境中,环境光直接照射在ALS和PS上,当物体遮住AP3426,光电二极管的光照强度则会降低,即可判断物体接遮住。
在黑暗环境中,AP3426发出红外线照射在靠近物体上,反射到PS光电二极管上,当物体遮住AP3426, PS光电二极管的光照强度则会降低,即可判断物体遮住。
20.2 硬件设计
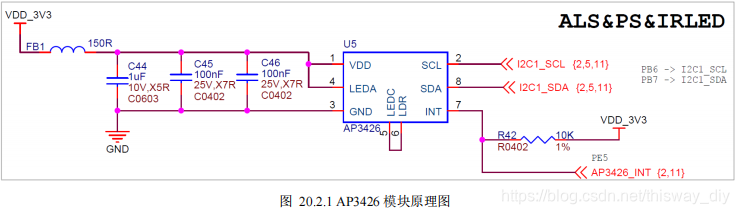
如图 20.2.1 为开发AP3426部分的原理图,U5为AP3426芯片。不同于AT24CXX可以电路设置设备地址,AP3426的设备地址是固定的,由芯片手册可以知为0x1E。
I²C1的SCL使用的PB6引脚,SDA使用的PB7引脚,此外,AP3426的中断引脚连接的PE5。
20.3 软件设计
20.3.1 软件设计思路
实验目的:本实验通过使用MCU的硬件I2C,获取AP3426的数据。
- 初始化I2C协议相关参数:设置速度、寻址长度模式等;
- 初始化I2C硬件相关参数:I2C时钟使能、GPIO端口时钟使能、GPIO引脚设置为I2C复用;
- 使用HAL提供的I2C对AP3426读写,封装AP3426初始化函数、数据读取函数;
- 主函数编写控制逻辑:按下按键KEY1(KEY_U),读取一次AP3426数据,并将数据通过串口打印;
本实验配套代码位于“5_程序源码\12_通信—硬件I2C\”。
20.3.2 软件设计讲解
- GPIO选择与接口定义
首先定义使用的哪一个I2C、SCL和SDA引脚,如代码段 20.3.1 所示。
代码段 20.3.1 模拟 I2C 引脚相关定义(driver_i2c.h)
/************************* I2C 硬件相关定义 *************************/ #define I2Cx I2C1 #define I2Cx_CLK_EN() __HAL_RCC_I2C1_CLK_ENABLE() #define I2Cx_ClockSpeed (400000) #define I2Cx_FORCE_RESET() __HAL_RCC_I2C1_FORCE_RESET() #define I2Cx_RELEASE_RESET() __HAL_RCC_I2C1_RELEASE_RESET() #define SCL_PIN GPIO_PIN_6 #define SCL_PORT GPIOB #define SCL_PIN_CLK_EN() __HAL_RCC_GPIOB_CLK_ENABLE() #define SDA_PIN GPIO_PIN_7 #define SDA_PORT GPIOB #define SDA_PIN_CLK_EN() __HAL_RCC_GPIOB_CLK_ENABLE() /************************* I2C 硬件相关定义结束 *************************/
- 初始化I2C I2C初始化和前面UART初始化类似,包含两部分:协议部分和硬件部分。
协议部分初始化如代码段 20.3.2 所示。
代码段 20.3.2 I2C 协议初始化(driver_i2c.c)
I2C_HandleTypeDef hi2c;
/*
* 函数名:void I2C_Init(void)
* 输入参数:
* 输出参数:无
* * 返回值:无
* 函数作用:初始化 I2C 速率和地址格式
*/
void I2C_Init(void) {
hi2c.Instance = I2Cx;
hi2c.Init.ClockSpeed = I2Cx_ClockSpeed; // 设置 SCL 时钟频率(最高 400000)
hi2c.Init.DutyCycle = I2C_DUTYCYCLE_2; // 设置 I2C 的 SCL 时钟的占空比(都可以)
hi2c.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE; // 设置广播呼叫模式(关闭)
hi2c.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE; // 设置禁止时钟延长模式(关闭)
hi2c.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT; // 设置 I2C 寻址长度模式(通常 7bit)
hi2c.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE; // 是否使用两个 STM32 的设备地址(关闭)
hi2c.Init.OwnAddress1 = 0x0A; // STM32 的设备地址 1(支持 7bit 或 10bit)
hi2c.Init.OwnAddress2 = 0; // STM32 的设备地址 2(只支持 7bit)
if(HAL_I2C_Init(&hi2c) != HAL_OK)
{
Error_Handler(); } }
- 14~21行:设置I2C协议参数;
– 14行:设置I2C的传输速率,最高不超过400kHz;
– 15行:设置SCL时钟的占空比,即低电平时间比高电平时间,可设置有I2C_DutyCycle_2(2:1)和
I2C_DutyCycle_16_9(16:9),一般要求不高,任意即可;
– 16行:I2C作为从机模式时,广播呼叫模式设置,通常用不上,关闭即可;
– 17行:I2C作为从机模式时,禁止时钟延长,通常用不上,关闭即可;
– 18行:设置I2C寻址长度模式,需要根据所接设备的地址长度决定,通常为7bit;
– 19行:STM32作为从机模式时,支持同时对两个设备地址作出响应,这里作为主机,关闭即可;
– 20行:设置STM32的设备地址1,这里作为主机,只要设备地址不与从机一样即可;
– 21行:设置STM32的设备地址2,没用到,不需要设置; - 23行:使用“HAL_I2C_Init()”初始化前面的“hi2c”,“HAL_I2C_Init()”会调用“HAL_I2C_MspInit()”
进行硬件相关初始化,“HAL_I2C_MspInit()”的内容需要自己编写,如代码段 20.3.3 所示;
代码段 20.3.3 I2C 硬件初始化(driver_i2c.c)
/*
* 函数名:void HAL_I2C_MspInit(I2C_HandleTypeDef *hi2c)
* 输入参数:hi2c-I2C 句柄
* 输出参数:无
* 返回值:无
* 函数作用:使能 I2C 的时钟,使能引脚时钟,并配置引脚的复用功能
*/
void HAL_I2C_MspInit(I2C_HandleTypeDef *hi2c)
{
GPIO_InitTypeDef GPIO_InitStruct;
if(hi2c->Instance==I2Cx) {
I2Cx_CLK_EN();
SCL_PIN_CLK_EN();
SDA_PIN_CLK_EN();
GPIO_InitStruct.Pin = SCL_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(SCL_PORT, &GPIO_InitStruct);
GPIO_InitStruct.Pin = SDA_PIN;
HAL_GPIO_Init(SDA_PORT, &GPIO_InitStruct);
I2Cx_FORCE_RESET(); // 强制复位
I2Cx_RELEASE_RESET(); // 释放复位
} }
I2C硬件初始化的内容比较简单,依旧是先使能时钟,然后设置引脚复用,最后还需要复位下I2C。初始化后,便可使用HAL库提供的I2C发送/接收函数,HAL提供三种主机收发函数:
- HAL_I2C_Master_Receive()/HAL_I2C_Master_Transmit():I2C收发数据,使用超时管理模式;
- HAL_I2C_Master_Receive_IT()/HAL_I2C_Master_Transmit_IT():I2C收发数据,使用中断模式;
- HAL_I2C_Master_Receive_DMA()/HAL_I2C_Master_Transmit_DMA():I2C收发数据,使用DMA模式;这里三种收发函数都可满足需求,这里简单处理,没有使用中断和DMA,因此使用超时管理模式。
- 初始化和读写AP3426
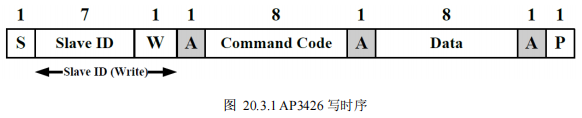
由AP3426数据手册,可知AP3426写时序如图 20.3.1 所示,首先发送设备地址,其次是命令代码(寄存
器地址),最后是数据内容。根据时序,编写代码如代码段 20.3.4 所示。
代码段 20.3.4 AP3426 写时序(driver_ap3426.c)
/*
* 函数名:void AP3426_WriteOneByte(uint8_t reg, uint8_t data)
* 输入参数:reg 待写 AP3426 寄存器地址 data 待写数据
* 输出参数:无
* * 返回值:无
* 函数作用:写 AP3426 一字节数据
*/
void AP3426_WriteOneByte(uint8_t reg, uint8_t data)
{
uint16_t write_data = reg | (data<<8);
if(HAL_I2C_Master_Transmit(&hi2c, (AP3426_ADDR << 1) | AP3426_W , (uint8_t*)&write_data, 2, 300) != HAL_OK)
{
Error_Handler(); }
while (HAL_I2C_GetState(&hi2c) != HAL_I2C_STATE_READY);
}
- 10行:将寄存器地址和待发送的数据,组成一个数据;
- 12行:使用“HAL_I2C_Master_Transmit()”发送数据,该函数需要五个参数:
– 第一个:指定哪一个I2C;
– 第二个:指定设备地址,最后一位为读/写位;
– 第三个:待传输的数据所指向的指针;
– 第四个:指定数据大小,前面将寄存器地址和待发送数据组在了一次,因此这里数据长度为2;
– 第五个:指定超时时间,多长时间没有收到响应信号则表示传输失败; - 16行:等待正常传输完成;
由AP3426数据手册,可知AP3426读时序如图 20.3.1 所示,首先发送设备地址,其次是命令代码(寄存器地址),然后重新启动,发送设备地址,最后读取数据内容。根据时序,编写代码如图 20.3.2 所示。

代码段 20.3.5 AP3426 读时序(driver_ap3426.c)
/*
* 函数名:uint8_t AP3426_ReadOneByte(uint8_t reg)
* 输入参数:reg 待读 AP3426 寄存器地址
* 输出参数:无
* 返回值:读取的 AP3426 数据
* 函数作用:读 AP3426 一字节数据
*/
uint8_t AP3426_ReadOneByte(uint8_t reg)
{
uint8_t read_data = 0;
if(HAL_I2C_Master_Transmit(&hi2c, (AP3426_ADDR << 1) | AP3426_W , (uint8_t*)®, 1, 300) != HAL_OK)
{
Error_Handler(); }
while (HAL_I2C_GetState(&hi2c) != HAL_I2C_STATE_READY);
if(HAL_I2C_Master_Receive(&hi2c, (AP3426_ADDR << 1) | AP3426_R , (uint8_t*)&read_data, 1, 300) != HAL_OK)
{
Error_Handler(); }
return read_data;
}
- 12行:使用“HAL_I2C_Master_Transmit()”发送寄存器地址;
- 18行:使用“HAL_I2C_Master_Receive ()”读取寄存器数据;
AP3426的读写时序,分别与前面AT24Cxx随机读、字节写时序非常类似。对于其它I2C设备/模块,也差不多。
有了读写AP3426的函数,便可以操作寄存器,初始化和读取AP3426数据。AP3426的初始化比较简单,流程如下:
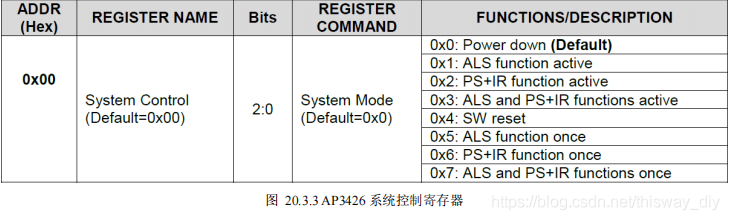
- 复位:设置System Control寄存器(地址:0x00)为“SW reset”(值:0x04);
- 设置工作模式:设置System Control寄存器(地址:0x00)为“ALS and PS+IR functions active”(值:
0x03),即IR+PS+ALS三个都激活使用; - 设置中断(这里没使用中断);
代码段 20.3.6 AP3426 初始化(driver_ap3426.c)
/*
* 函数名:uint8_t AP3426_Init(void)
* 输入参数:无
* 输出参数:无
* 返回值:0 成功 1 失败
* 函数作用:初始化 AP3426
*/
uint8_t AP3426_Init(void) {
uint8_t ret_value = 0;
AP3426_WriteOneByte(SYS_CONFIG_ADDR, SYS_SW_RESET); // 系统软件复位
HAL_Delay(50);
AP3426_WriteOneByte(SYS_CONFIG_ADDR, SYS_ALS_PS_IR_ACT); // IR+PS+ALS 三个都激活使用
HAL_Delay(50);
ret_value = AP3426_ReadOneByte(SYS_CONFIG_ADDR); // 读取配置寄存器值
if(ret_value != SYS_ALS_PS_IR_ACT) // 判断是否与设置的一致
{
return 1; }
printf("I2C 配置寄存器:0x%x\n\r", SYS_CONFIG_ADDR);
printf("I2C 配置值为:0x%x\n\r", SYS_ALS_PS_IR_ACT);
printf("I2C 读取到的配置值:0x%x\n\r", ret_value);
return 0; }
- 11行:复位AP3426;
- 14行:设置AP3426的IR(环境红外光)、PS(距离感应)、ALS(光照强度)都激活使用;
- 16~20行:读取System Control寄存器的值,以便确认是否设置正确;
- 21~23行:打印调试信息;
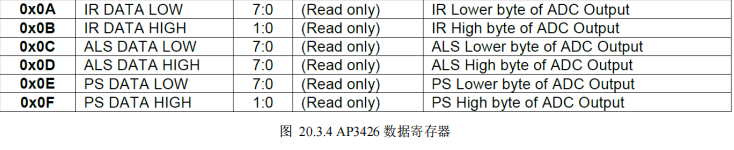
初始化配置完后,就可以读取AP3426寄存器数据,如图 20.3.4 所示,分别是IR、ALS、PS的数据寄存器,每个数据占据相邻两位。以IR为例,分别读取IR_DATA_LOW(0x0A)的8位和IR_DATA_HIGH(0x0B)寄存器的低两位,再合并就得到IR的数据,同理可以得到ALS、PS的数据,如代码段 20.3.7 所示。
代码段 20.3.7 获取 AP3426 数据(driver_ap3426.c)
/*
* 函数名:void AP3426_Read_IR_Data(uint16_t *pIR)
* 输入参数:无
* 输出参数:IR 数据
* 返回值:无
* 函数作用:读 AP3426 IR(环境红外光)数据
*/
void AP3426_Read_IR_Data(uint16_t *pIR)
{
uint8_t ir_l = 0, ir_h = 0;
ir_l = AP3426_ReadOneByte(IR_DATA_LOW);
ir_h = AP3426_ReadOneByte(IR_DATA_HIGH);
if( (ir_l&0x80) == 0x80) // Invalid IR and PS data
{ *pIR = 0; }
else // ir_l Bit[1:0] is data, ps_l bits[3:0] ans ps_h bits[5:0] is data
{ *pIR = (ir_h<<8) | (ir_l&0x03);
} }
/*
* 函数名:void AP3426_Read_PS_Data(uint16_t *pPS)
* 输入参数:无
* 输出参数:PS 数据
* 返回值:无
* 函数作用:读 AP3426 PS(距离)数据
*/
void AP3426_Read_PS_Data(uint16_t *pPS)
{
uint8_t ps_l = 0, ps_h = 0;
ps_l = AP3426_ReadOneByte(PS_DATA_LOW);
ps_h = AP3426_ReadOneByte(PS_DATA_HIGH);
if( (ps_l&0x40)==0x40) // Invalid IR and PS data
{ *pPS = 0; }
else // ir_l Bit[1:0] is data, ps_l bits[3:0] ans ps_h bits[5:0] is data
{ *pPS = ((ps_h&0x1F)<<8) | (ps_l&0x0F);
} }
/*
* 函数名:vvoid AP3426_Read_ALS_Data(uint16_t *pALS)
* 输入参数:无
* 输出参数:ALS 数据
* 返回值:无
* 函数作用:读 AP3426 ALS(光照)数据
*/
void AP3426_Read_ALS_Data(uint16_t *pALS)
{
uint8_t als_l = 0, als_h = 0;
als_l = AP3426_ReadOneByte(ALS_DATA_LOW);
als_h = AP3426_ReadOneByte(ALS_DATA_HIGH); *pALS = (als_h<<8) | (als_l);
}
然后将三个读取函数,封装并打印读取结果。
代码段 20.3.8 AP3426 测试函数(driver_ap3426.c)
/*
* 函数名:void AP3426_ReadDataTest(void)
* 输入参数:无
* 输出参数:无
* 返回值:无
* 函数作用:测试读取 AP3426 所有数据
*/
void AP3426_ReadDataTest(void) {
uint16_t ir = 0, ps = 0, als = 0;
AP3426_Read_IR_Data(&ir);
AP3426_Read_PS_Data(&ps);
AP3426_Read_ALS_Data(&als);
printf("\n\r");
printf("AP3426 IR = 0x%x\n\r", ir);
printf("AP3426 PS = 0x%x\n\r", ps);
printf("AP3426 ALS = 0x%x\n\r", als); }
最后还需设置调试串口和用户按键,相关代码这里不在赘述。
- 主函数控制逻辑
在主函数里,每按一下按键,调用“AP3426_ReadDataTest()”获取一次AP3426数据,如代码段 20.3.9所示。
代码段 20.3.9 主函数控制逻辑(main.c)
// 初始化按键
KeyInit();
// 在 windows 下字符串\n\r 表示回车
// 如果工程在编译下面这句中文的时候报错,请在“Option for target”->"C/C++"->"Misc Controls"添加“ --locale=english”
printf("**********************************************\n\r");
printf("-->百问科技:www.100ask.net\n\r");
printf("-->硬件 I2C 读取 AP3426 实验\n\r");
printf("**********************************************\n\r");
// 初始化 I2C
I2C_Init();
// 初始化 AP3426
AP3426_Init();
while(1) {
if(key_flag) // 按键按下
{
key_flag = 0;
AP3426_ReadDataTest(); // 读取 AP3426 数据
} }
20.4 实验效果
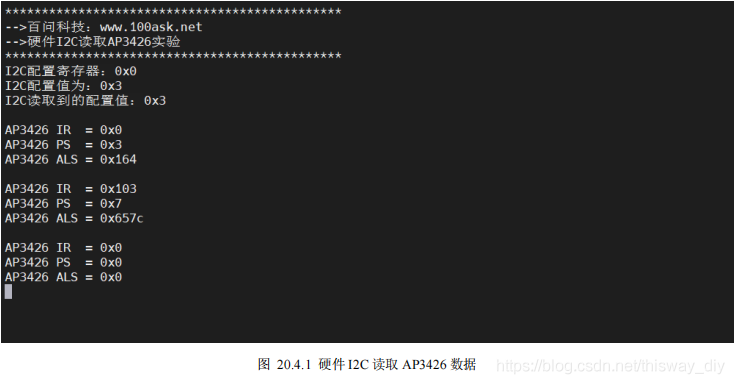
本实验对应配套资料的“5_程序源码\ 12_通信—硬件I2C\”。打开工程后,编译,下载,按下按键KEY1(KEY_U)即可获取一次AP3426数据并在串口打印。
AP3426在图 3.3.1 中编号37处。分别在正常情况、手电筒照射AP3426、遮住AP3426的情况下,获取数据如图 20.4.1 所示。
百问网技术论坛:
http://bbs.100ask.net/
百问网嵌入式视频官网:
https://www.100ask.net/index
百问网开发板:
淘宝:https://100ask.taobao.com/
天猫:https://weidongshan.tmall.com/
技术交流群2(鸿蒙开发/Linux/嵌入式/驱动/资料下载)
QQ群:752871361
单片机-嵌入式Linux交流群:
QQ群:536785813

- STM32--硬件I2C-2402
- 浅谈 STM32 硬件I2C的使用 (中断方式 无DMA 无最高优先级)
- 关于 STM32 的硬件I2C
- 关于stm32硬件I2C BUSY锁死的一点说法
- 电位器mcp4561调试记录---stm32,I2C通信
- STM32 I2C 硬件中断方式实现方法,带流程图
- STM32 硬件I2C 到底是不是个坑?
- stm32 i2c通信 [操作寄存器+库函数]
- 浅谈 STM32 硬件I2C的使用 (中断方式 无DMA 无最高优先级)
- STM32硬件i2c调试24C16记录(挣扎一天)
- stm32 i2c通信 [操作寄存器+库函数]
- STM32HAL库学习笔记--硬件I2C读写AT24C512
- STM32硬件i2c的EV卡死问题的终极解决(已通过老化测试40h)
- 浅谈 STM32 硬件I2C的使用 (中断方式 无DMA 无最高优先级)
- stm32 i2c通信 [操作寄存器+库函数]
- STM32笔记(十一)---I2C读写EEPROM---硬件I2C
- STM32单片机硬件I2C驱动程序(查询方式)
- STM32’s I2C 硬件BUG引发的血案(qzm)
- stm32 i2c通信 [操作寄存器+库函数]
- STM32的硬件I2C与AT24C16