使用OpenCV+Tensorflow跟踪排球的轨迹
2021-01-04 23:16
1036 查看
介绍
本文将带领大家如何把人工智能技术带到体育项目中。
运动中的人工智能是一个很新的东西,以下是一些有趣的作品:
-
篮球
- https://dev.to/stephan007/open-source-sports-video-analysis-using-maching-learning-2ag4
- 网球
- https://www.researchgate.net/publication/329740964_Convolutional_Neural_Networks_Based_Ball_Detection_in_Tennis_Games
- 排球
- https://www.tugraz.at/institute/icg/research/team-bischof/lrs/downloads/vb14/
我是个排球迷,所以让我们来看看最后一个网站,这是一个奥地利研究所的网站,他分析了当地业余联赛的比赛数据。
其中有一些文档需要阅读,最主要的信息是视频数据集。
排球是一项复杂的运动,有许多不同的因素,所以我从一个很小但很重要的部分开始——球。
跟踪球是一项非常著名的任务。谷歌提供了很多链接,但其中有许多只是一个简单的演示。在摄像机前识别和跟踪一个彩色的大球是无法与真实的比赛用球检测相比较的,因为现实世界中的球很小,移动速度很快,而且融入了背景中。
最后,我们希望得到这样的结果:

在开始之前,让我们先来研究以下视频数据集的一些细节:
- 摄像机是静止的,位于球场后面
- 如果打球的运动员技术水平不是高,我们可以轻松地看到球(专业人士击球太猛,如果没有电视回放几乎不可能看到球)
- 球的颜色:蓝色和黄色,与地板的反差不大,这使得所有基于颜色的方法变得毫无意义
解决方案
到目前为止最明显的方法 —— 用颜色 —— 不起作用,所以我利用的是正在移动中的球。
让我们找到移动的物体并识别出它是球,听起来很简单。
OpenCV包含用于检测带有背景移除的移动对象的工具:
mask = backSub.apply(frame) mask = cv.dilate(mask, None) mask = cv.GaussianBlur(mask, (15, 15),0) ret,mask = cv.threshold(mask,0,255,cv.THRESH_BINARY | cv.THRESH_OTSU)
将这样的图片

转化成:

在这个例子中,球在上面,人脑和眼睛可以很容易地检测到它,那我们是如何决定的?可以从图中可以推断出一些规律:
-
这个球是团状的
- 这是照片上最高的斑点
但第二条规律不太管用,例如在这张照片中,最高的斑点是裁判的肩膀。

但 highest-blob 方法提供了进一步的初始数据。
我们可以收集这些斑点并训练分类器来区分球。
此数据集如下所示:

在人工智能方面来看,这是一个二元分类的彩色图像,非常类似于Cats-vs-Dogs挑战。
- Cats-vs-Dogs:https://www.kaggle.com/c/dogs-vs-cats
实现的方法有很多种,但最流行的方法是使用VGG神经网络。
- VGG神经网络:https://blog.keras.io/building-powerful-image-classification-models-using-very-little-data.html
一个问题 —— 球的图片非常小,不适合用多个卷积层,所以我不得不将VGG简化为一个非常简单的架构:
model = Sequential([ Convolution2D(32,(3,3), activation='relu', input_shape=input_shape), MaxPooling2D(), Convolution2D(64,(3,3), activation='relu'), MaxPooling2D(), Flatten(), Dense(64, activation='relu'), Dropout(0.1), Dense(2, activation='softmax') ]) model.compile(loss="categorical_crossentropy", optimizer=SGD(lr=0.01), metrics=["accuracy"])
该模型简单,结果一般:大约20%的假阳性和30%的假阴性。
但这总比什么都没有好,当然,这样还不够。
应用于游戏的模型会产生许多“假球”:

实际上有两种假球:
- 它们随机时间出现在随机位置
- 这个模型总是犯错误,把其他东西认作一个球
轨迹
下一步,我们的想法是这样:球不会随机移动,而是遵循抛物线或线性轨迹。
对这个几何体上的水滴运动进行验证将切断随机和一致的错误。
有一个记录一次打球的轨迹的例子:
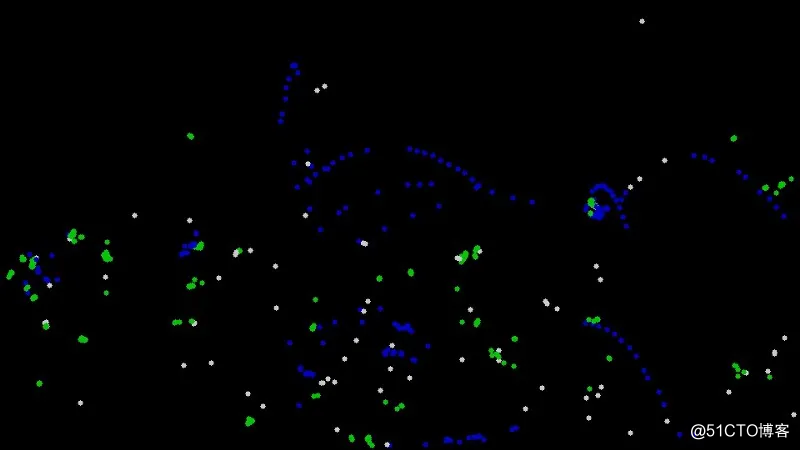
其中有向路径为蓝色,静态路径为绿色,随机路径为灰色。
只有蓝色的轨迹才是有用的,它们至少由3个点组成,并且有一个方向。方向是非常重要的,因为有了方向就可以预测下一个点,以防它在实际流中丢失,并且没有检测到新的路径。
这个逻辑应用到片段中产生一个相当真实的跟踪:

链接
Github存储库 - https://github.com/tprlab/vball
参考链接:https://towardsdatascience.com/ball-tracking-in-volleyball-with-opencv-and-tensorflow-3d6e857bd2e7

相关文章推荐
- 使用亚马逊AWS云服务器进行深度学习——免环境配置/GPU支持/Keras/TensorFlow/OpenCV
- tensorflow74 使用tensorflow dlib opencv做特定人脸识别
- 解决anaconda navigator无法打开的问题及使用anaconda navigator搭建 tensorflow\opencv等环境的注意点(硬核排坑文)
- pycharm+anaconda+opencv+tensorflow安装
- 【深度学习+Android+图像处理】使用TensorFlow Lite在Android手机上实现图像分类
- qt配置tensorflow + opencv 提示protoc版本错误
- python tensorflow 使用minist数据集实现手写数字识别
- 使用TensorFlow slim文件夹当中的inception_resnet_v2网络训练自己的分类数据集
- pure pursuit 轨迹跟踪算法介绍及autoware中的使用介绍
- Opencv:Trackbar(轨迹条)的创建与使用——改变阈值为例
- jupyter tensorflow环境导入opencv问题
- OpenCV:使用Kalman滤波器跟踪一个旋转的点
- TensorFlow .tfrecords训练文件生成、使用
- Google TensorFlow 机器学习框架介绍和使用
- 使用TensorFlow object detection API 的前奏:Protobuf 编译
- ubuntu下的tensorflow安装:cuda8.0+cudnn5.0+opencv2.4.11+anaconda+tensorflow
- 基于anaconda安装tensorflow/opencv/dlib
- opencv3/C++ 使用Tracker实现简单目标跟踪
- 使用Kubernetes和TensorFlow Serving将神经网络镜像分类进行弹性扩容
- Keras设定GPU使用内存大小(Tensorflow backend)