【原创】xenomai内核解析--xenomai与普通linux进程之间通讯XDDP(一)--实时端socket创建流程
版权声明:本文为本文为博主原创文章,转载请注明出处。如有问题,欢迎指正。博客地址:https://www.cnblogs.com/wsg1100/
1.概述
上篇文章xenomai内核解析--实时IPC概述中介绍了RTIPC,从这篇文章开始开始深入xenomai内核,解析RTIPC的具体实现。
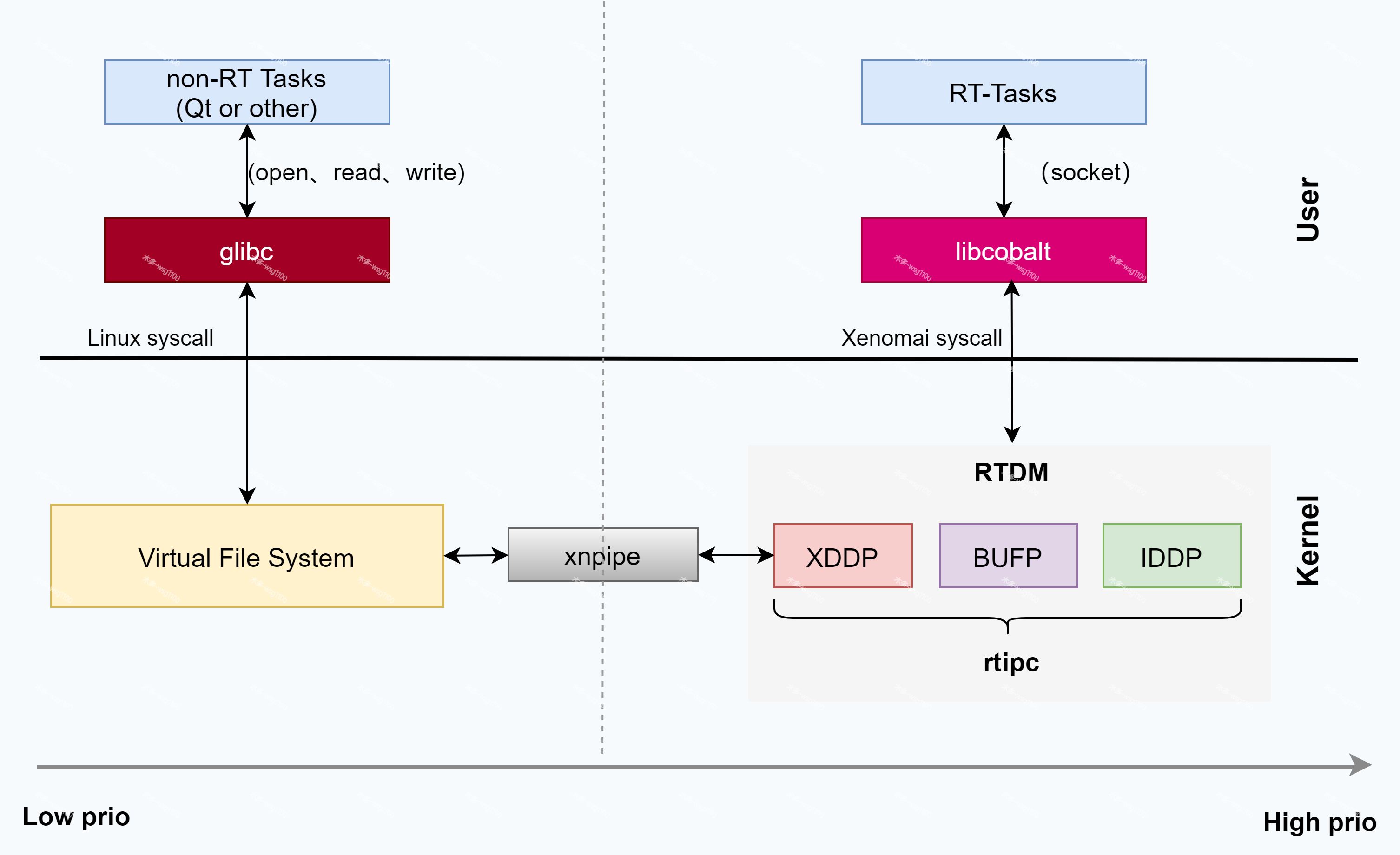
XDDP、IDDP和BUFP由于应用场景不一样,所以底层不一样,但也区别不大。XDDP用于xenomai任务与普通Linux任务通讯,提供两种方式,一种是每次读写作为一个数据报来操作,对应实时任务间的通讯方式IDDP;另一种为可以将多次读写的数据缓冲最后组成一个大的数据报发送,对应实时任务间的BUFP方式。所以解析了XDDP原理,那么IDDP和BUFP自然也就懂了,后面文章我也会简单说一下IDDP、XDDP。
需要先说明一下 XDDP几乎涉及了xenomai的所有关键组件,通过解析xenomai内核XDDP的实现源码,你会明白:
- xenomai内核: XDDP的详细实现。
- 实时设备驱动模型:RTDM是如何管理协议类设备的,应用是如何找到并使用具体的协议设备的(其实和Linux类似),如何为xenomai添加一个自定义协议设备等。
## 2.XDDP的使用注意事项
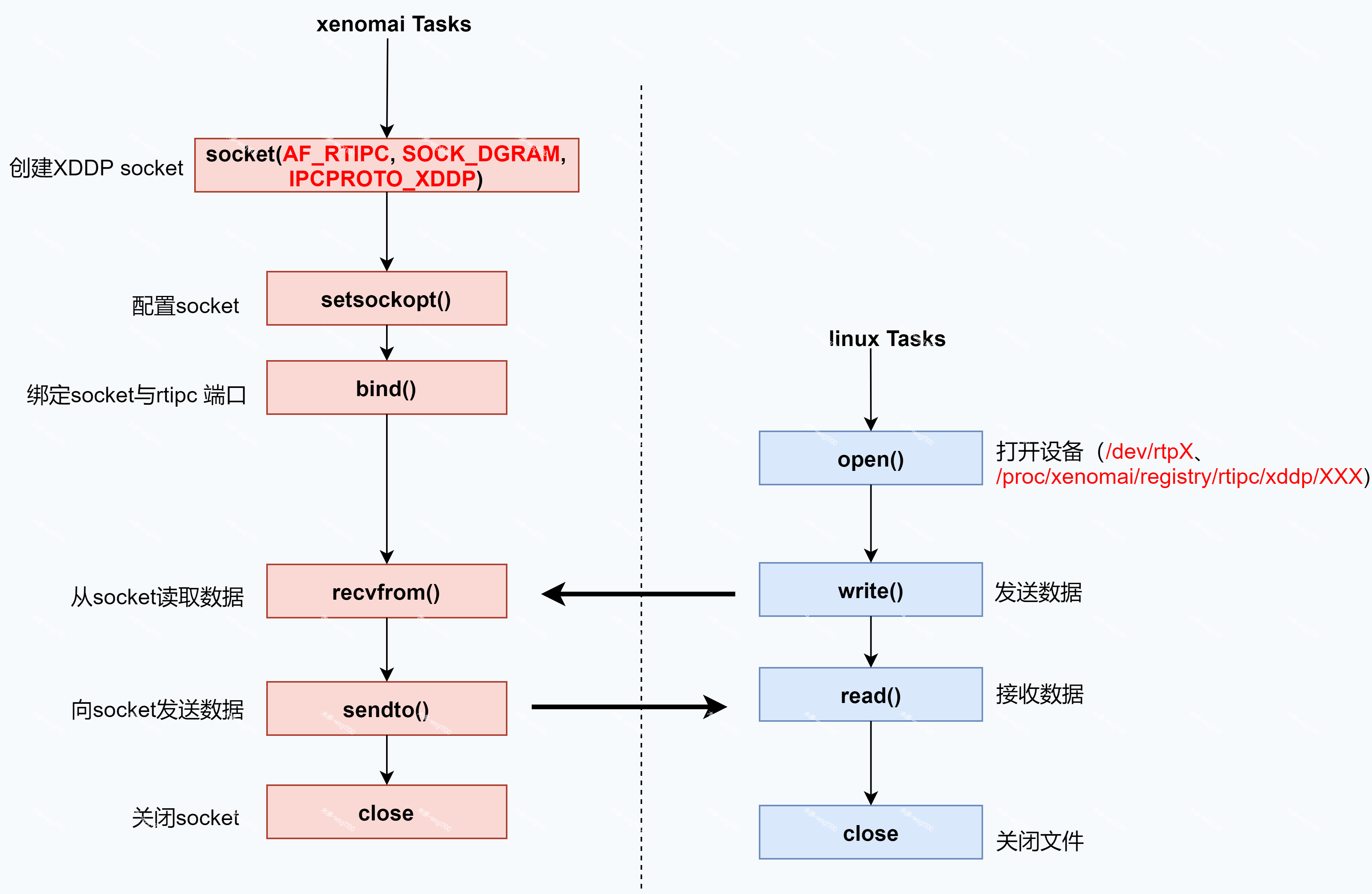
上篇文章已经介绍了具体的使用方法,linux端通过
read()、write()读写
/dev/rtp<minor>或
/proc/xenomai/registry/rtipc/xddp/label来通讯,Xenomai端通过套接字
recvfrom()或read()来接收数据,
sendto()或write()来发送数据。其中需要注意的是:
- XDDP 只能由xenomai应用(使用Libcobalt库编译)创建.
- 由于端口号与Linux端次设备号绑定,所以必须两边都关闭释放了才能再次使用同一个端口(可见文末总框图)。
下面我们就沿着这个流程到内核里面一探究竟,看看在内核里面,都创建了哪些数据结构,做了哪些事情。
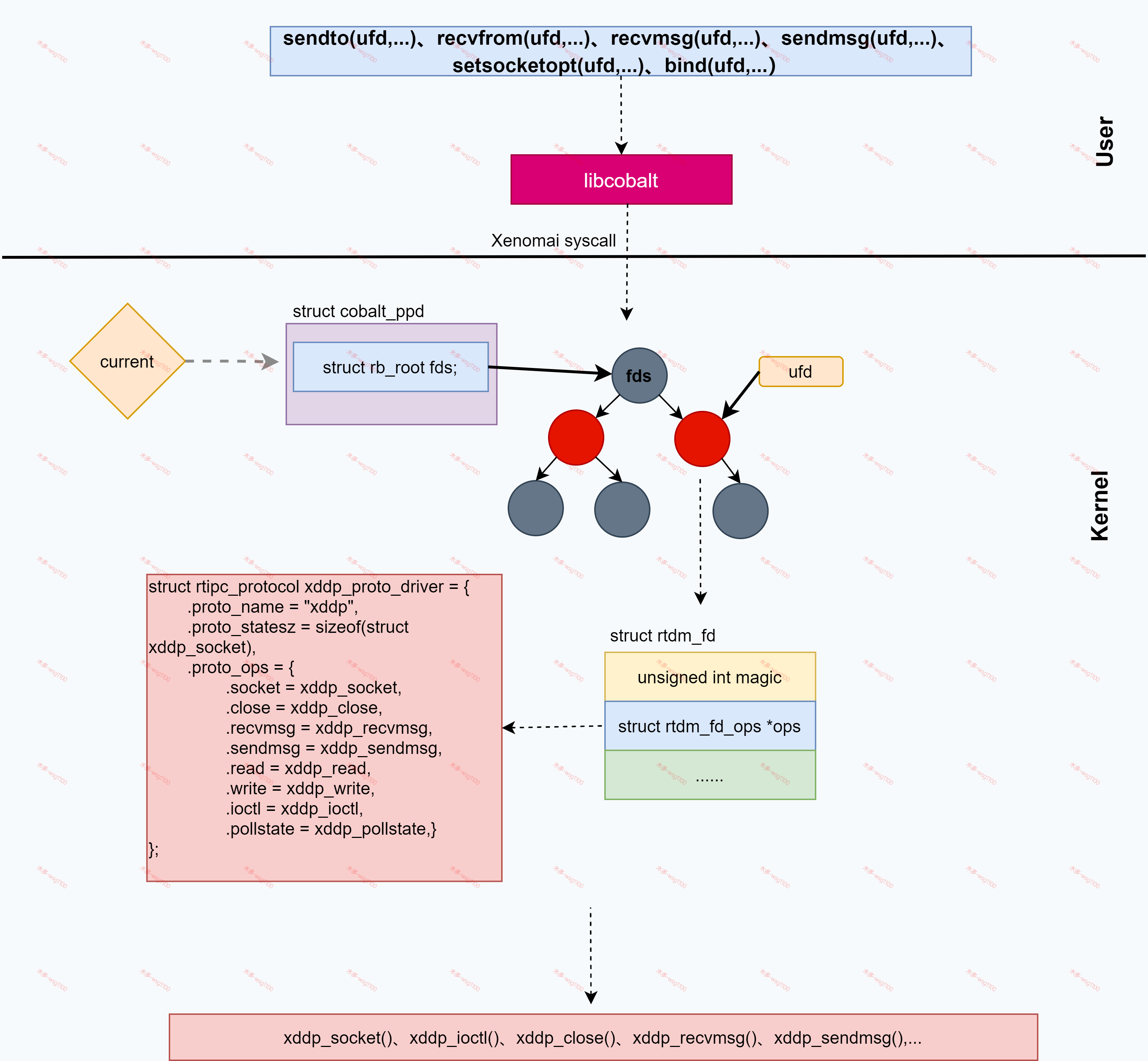
3.解析socket函数
从调用socket()函数开始。对于xenomai实时程序,该函数不是直接就执行系统调用,而是由xenomai实时库libcobalt中实现,实时应用编译时会链接到该库。
/*xenomai-3.x.x\lib\cobalt\rtdm.c*/
COBALT_IMPL(int, socket, (int protocol_family, int socket_type, int protocol))
{
int s;
s = XENOMAI_SYSCALL3(sc_cobalt_socket, protocol_family,
socket_type, protocol);
if (s < 0) {
s = __STD(socket(protocol_family, socket_type, protocol));
}
return s;
}
从该函数可以看到,首先执行xenomai内核调用,如果xenomai系统调用返回负值,一种情况时产生了错误,另一种情况说明这些参数不是要实时内核提供服务的,接着才去调用标准库执行linux的系统调用。这就实现了同一接口也可以让linux提供服务。
创建socket的时候有三个参数,一个是
protocol_family表示地址族,在linux中,如下两种是比较熟悉的。
#define AF_UNIX 1/* Unix domain sockets */ #define AF_INET 2/* Internet IP Protocol */
对于xenomai,
protocol_family只有一种,如果自己为xenomai内核添加自定义的协议设备就可以通过该参数识别:
/* Address family */ #define AF_RTIPC 111 /* Protocol family */ #define PF_RTIPC AF_RTIPC
第二个参数是
socket_type,也即 Socket 的类型。类型是比较少的。
第三个参数是
protocol,是协议。协议数目是比较多的,也就是说,多个协议会属于同一种类 型。
常用的 Socket 类型有三种,分别是
SOCK_STREAM、
SOCK_DGRAM和
SOCK_RAW。
enum sock_type {
SOCK_STREAM = 1,
SOCK_DGRAM = 2,
SOCK_RAW = 3,
......
};
SOCK_STREAM是面向数据流的,协议 IPPROTO_TCP属于这种类型。SOCK_DGRAM是面 向数据报的,协议IPPROTO_UDP 属于这种类型。如果在内核里面看的话,IPPROTO_ICMP 也属于这种类型。SOCK_RAW是原始的 IP 包,IPPROTO_IP 属于这种类型。
对于
socket_type,在xenomai 中,通讯是在系统内部,统一为数据报即
SOCK_DGRAM,其余无效。xenomai提供的
protocol如下几种:
enum {
/** Default protocol (IDDP) */
IPCPROTO_IPC = 0,
IPCPROTO_XDDP = 1,
IPCPROTO_BUFP = 3,
IPCPROTO_MAX
};
其实xenomai提供的rtipc只作为实时进程间通讯,内部与linux socket一点关系都没有,从上就可以看出,仅是函数接口相同而已。
这一节,我们重点看
IPCPROTO_XDDP协议。实时系统调用
sc_cobalt_socket对应内核代码如下。它会调用
__rtdm_dev_socket()
/*kernel\xenomai\posix\io.c*/
COBALT_SYSCALL(socket, lostage,
(int protocol_family, int socket_type, int protocol))
{
return __rtdm_dev_socket(protocol_family, socket_type, protocol);
}
/*kernel\xenomai\rtdm\core.c*/
int __rtdm_dev_socket(int protocol_family, int socket_type,
int protocol)
{
struct rtdm_dev_context *context;
struct rtdm_device *dev;
int ufd, ret;
secondary_mode_only();
dev = __rtdm_get_protodev(protocol_family, socket_type);
......
ufd = __rtdm_anon_getfd("[rtdm-socket]", O_RDWR);
......
ret = create_instance(ufd, dev, &context);
......
if (dev->ops.socket) {
ret = dev->ops.socket(&context->fd, protocol);
......
}
......
ret = rtdm_fd_register(&context->fd, ufd);
......
return ufd;
}
secondary_mode_only()表示目前上下文必须是linux域,应为涉及到linux一些资源分配,如文件描述符。你可能会疑惑,我们创建调用socket函数的应用已经在实时线程里了,而且我们使用实时库libcobalt发起的系统调用,进内核后应该是haed域,而这里为什么还secondary_mode_only?解答这个问题请移步本博客其他文章xenomai内核解析--双核系统调用(一)小节的权限控制。
先是根据
protocol_family和
socket_type转换为
xnkey_t来查找对应的rtdm_device.
struct rtdm_device *__rtdm_get_protodev(int protocol_family, int socket_type)
{
struct rtdm_device *dev = NULL;
struct xnid *xnid;
xnkey_t id;
secondary_mode_only();
id = get_proto_id(protocol_family, socket_type);
mutex_lock(®ister_lock);
xnid = xnid_fetch(&protocol_devices, id);
if (xnid) {
dev = container_of(xnid, struct rtdm_device, proto.id);
__rtdm_get_device(dev);
}
mutex_unlock(®ister_lock);
return dev;
}
3.1 RTDM Protocol Devices
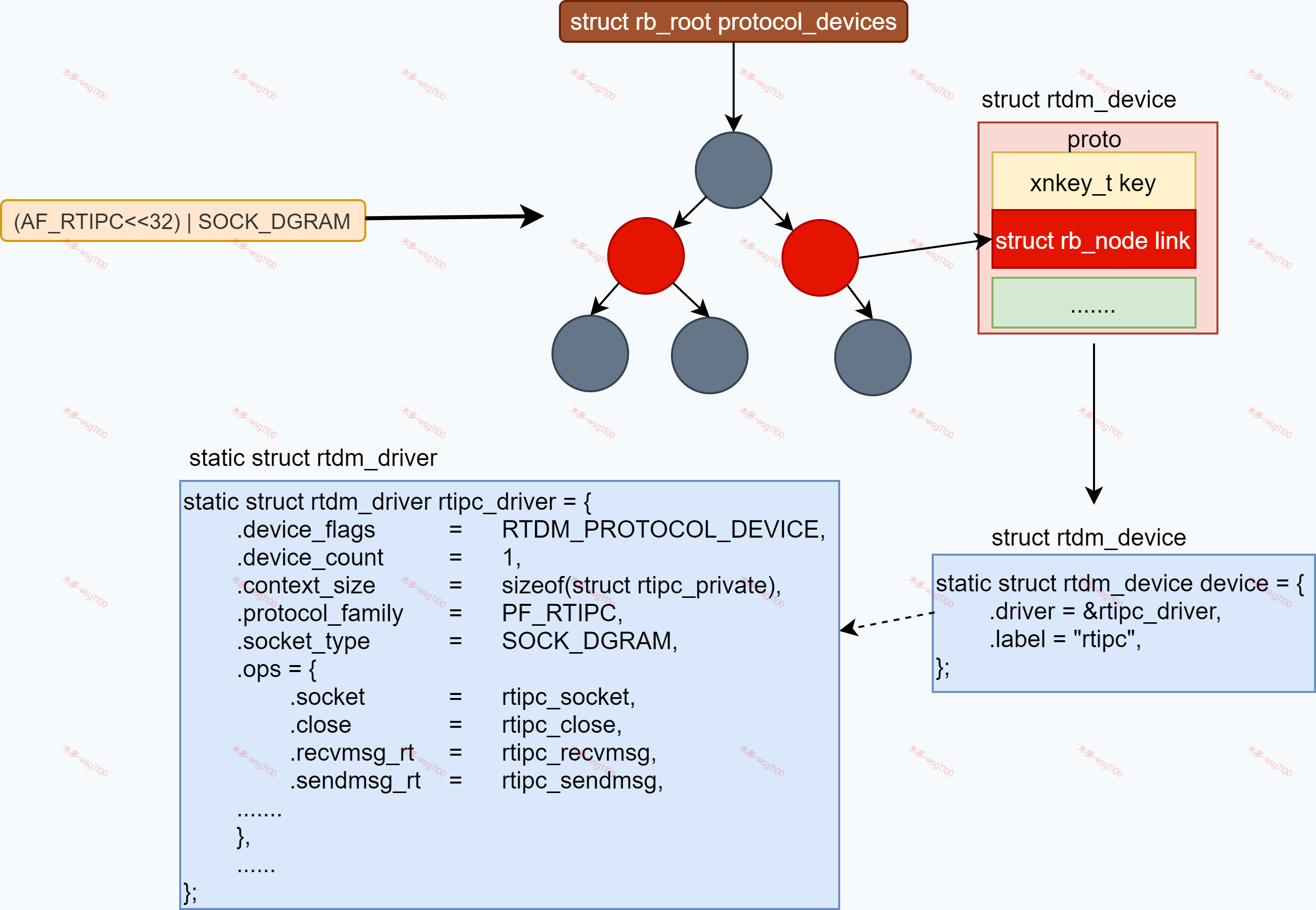
id类型为longlong,高32位为
protocol_family,低32位为
socket_type,将它作为key在红黑树
protocol_devices上找到对应的设备。
static struct rb_root protocol_devices;
protocol_devices是一个全局变量,其类型是struct rb_root,我们知道xenomai 实时驱动模型(RTDM)将所有实时设备分为两种
Protocol Devices(协议类设备)和
CharacterDevices(字符类设备),
protocol_devices作为所有Protocol Devices的根节点,所有Protocol Devices驱动注册时调用
rtdm_dev_register()后都会挂到
protocol_devices上。
xenomai中实时进程间通讯RTDM设备rtipc及其rtipc_driver,在
drivers\xenomai\ipc\rtipc.c中如下:
static struct rtdm_driver rtipc_driver = {
.profile_info = RTDM_PROFILE_INFO(rtipc,
RTDM_CLASS_RTIPC,
RTDM_SUBCLASS_GENERIC,
1),
.device_flags = RTDM_PROTOCOL_DEVICE,
.device_count = 1,
.context_size = sizeof(struct rtipc_private),
.protocol_family = PF_RTIPC, /*地址族*/
.socket_type = SOCK_DGRAM, /*socket类型*/
.ops = {
.socket = rtipc_socket,
.close = rtipc_close,
.recvmsg_rt = rtipc_recvmsg,
.recvmsg_nrt = NULL,
.sendmsg_rt = rtipc_sendmsg,
.sendmsg_nrt = NULL,
.ioctl_rt = rtipc_ioctl,
.ioctl_nrt = rtipc_ioctl,
.read_rt = rtipc_read,
.read_nrt = NULL,
.write_rt = rtipc_write,
.write_nrt = NULL,
.select = rtipc_select,
},
};
static struct rtdm_device device = {
.driver = &rtipc_driver,
.label = "rtipc",
};
从
rtipc_driver中的
rtdm_fd_ops我们就可以看出一二,创建一个rtipc socket后,对该socket的数据收发、读写等操作都会调用到
rtdm_fd_ops内的
rtipc_sendmsg()、rtipc_recvmsg()等函数。
同样,如果需要自定义一个xenomai Protocol Devices,实现这些函数,为该设备设置好
protocol_family和
socket_type后,我们的实时应用就可以通过调用socket(),然后xenomai RTDM通过
(protocol_family<<32) | socket_type作为xnkey_t到该设备及对应的driver,来让该设备为我们服务。
回到
__rtdm_dev_socket(),接下来调用
__rtdm_anon_getfd完成在用户空间定义一个
[rtdm-socket]的文件,将
[rtdm-socket]与
rtdm_dumb_fops结合起来。
int __rtdm_dev_socket(int protocol_family, int socket_type,
int protocol)
{
......
ufd = __rtdm_anon_getfd("[rtdm-socket]", O_RDWR);
......
......
ret = create_instance(ufd, dev, &context);
......
}
为什么要这样做呢?用户空间需要一个文件描述符来与内核rtdm_fd对应起来,ufd作为用户套接字socket,后面的代码会看到ufd成为红黑树上查找rtdm_fd的keyt_t,当使用socket接口对ufd操作时,到了内核里就会用ufd找到对应的rtdm_fd。但是直接对ufd使用read/write等操作是不允许的,所以还需要为ufd设置file_operation
rtdm_dumb_fops,
rtdm_dumb_fops里的函数均打印一条警告信息,直接对ufd使用read/write等操作时就内核就会输出WARNING信息。
static inline void warn_user(struct file *file, const char *call)
{
struct dentry *dentry = file->f_path.dentry;
printk(XENO_WARNING
"%s[%d] called regular %s() on /dev/rtdm/%s\n",
current->comm, task_pid_nr(current), call + 5, dentry->d_name.name);
}
static ssize_t dumb_read(struct file *file, char __user *buf,
size_t count, loff_t __user *ppos)
{
warn_user(file, __func__);
return -EINVAL;
}
.....
const struct file_operations rtdm_dumb_fops = {
.read = dumb_read,
.write = dumb_write,
.poll = dumb_poll,
.unlocked_ioctl = dumb_ioctl,
};
接着调用
create_instance()创建
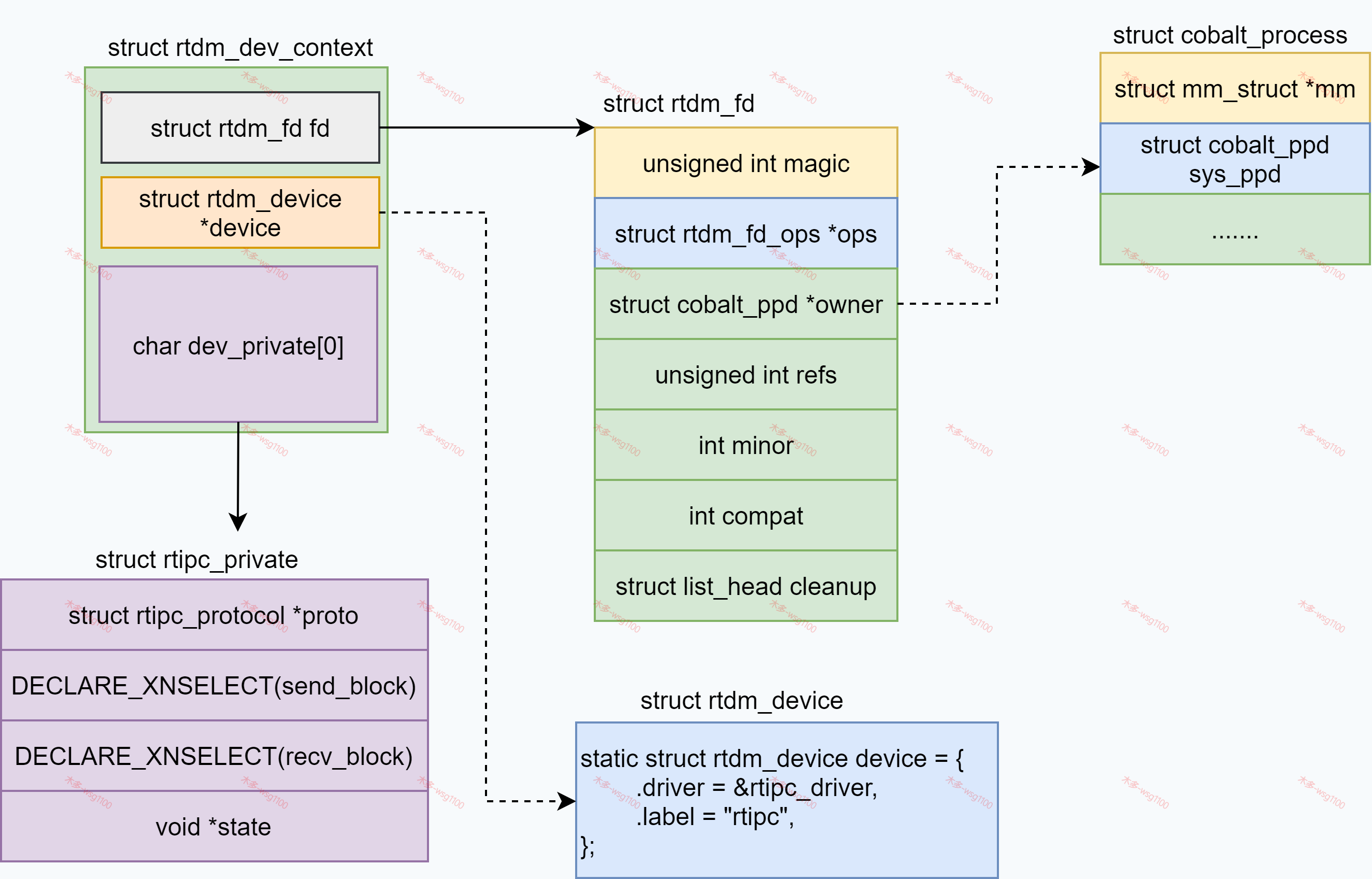
rtdm_dev_context并初始化对应的结构体,在RTDM中,struct rtdm_driver与struct rtdm_device描述了一个设备的共有抽象信息,但具体的设备有其操作的具体数据,称为实时设备的上下文
rtdm_dev_context,结构如下:
struct rtdm_dev_context {
struct rtdm_fd fd;
/** Set of active device operation handlers */
/** Reference to owning device */
struct rtdm_device *device;
/** Begin of driver defined context data structure */
char dev_private[0];
};
其中成员
fd类型为
struct rtdm_fd,其中记录着该设备的OPS,所属线程等信息。
成员变量dev_private为私有数据的起始地址,至于设备的私有数据有多大,在rtdm_device用
context_size表,对于rtipc,其大小为
sizeof(struct rtipc_private),所以为rtipc创建rtdm_dev_context时分配的内存大小为
sizeof(struct rtdm_dev_context) + rtipc_driver->context_size。
struct rtdm_fd如下
struct rtdm_fd {
unsigned int magic; /*RTDM_FD_MAGIC*/
struct rtdm_fd_ops *ops; /*RTDM设备可用的操作,*/
struct cobalt_ppd *owner; /*所属Process*/
unsigned int refs; /*打开计数*/
int minor;
int oflags;
#ifdef CONFIG_XENO_ARCH_SYS3264
int compat;
#endif
struct list_head cleanup;
};
- magic fd的类型 RTDM_FD_MAGIC
- *ops 描述RTDM设备可用的操作。 这些处理程序由RTDM设备驱动程序(rtdm_driver)实现。
- *owner该rtdm_fd所属的应用程序。
- refs 记录该fd的引用次数,当为0时会触发执行
ops->close()
- minor
- oflags
- cleanup
create_instance()执行完后各结构暂时如下:
接着执行
ops.socket()也就是
rtipc_socket(),传入参数为
rtdm_fd和
protocol(IPCPROTO_XDDP).
if (dev->ops.socket) {
ret = dev->ops.socket(&context->fd, protocol);
......
}
static int rtipc_socket(struct rtdm_fd *fd, int protocol)
{
struct rtipc_protocol *proto;
struct rtipc_private *priv;
int ret;
if (protocol < 0 || protocol >= IPCPROTO_MAX)
return -EPROTONOSUPPORT;
if (protocol == IPCPROTO_IPC)
/* Default protocol is IDDP */
protocol = IPCPROTO_IDDP;
proto = protocols[protocol - 1];
if (proto == NULL) /* Not compiled in? */
return -ENOPROTOOPT;
priv = rtdm_fd_to_private(fd);
priv->proto = proto;
priv->state = kmalloc(proto->proto_statesz, GFP_KERNEL);
......
xnselect_init(&priv->send_block);
xnselect_init(&priv->recv_block);
ret = proto->proto_ops.socket(fd);
......
return ret;
}
先看协议是不是xenomai支持的,如果协议类型为
IPCPROTO_IPC,那就是默认协议
IPCPROTO_IDDP,接着从数组中取出协议对应的
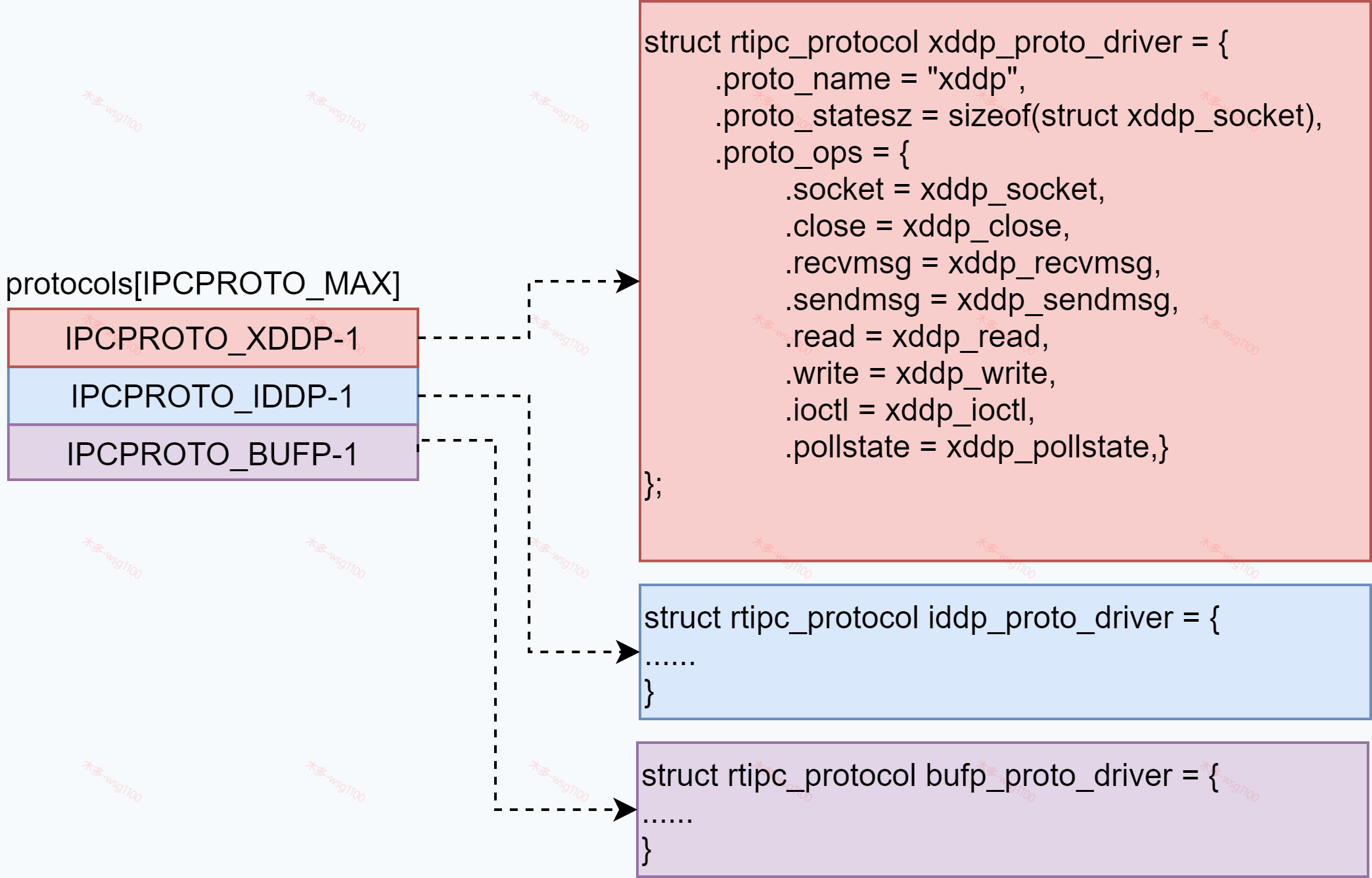
rtipc_protocol* proto,之前说过rtipc提供三种进程间通讯:IDDP、XDDP、BUFP,用结构体
struct rtipc_protocol来描述它们,保存在数组
rtipc_protocol中:
static struct rtipc_protocol *protocols[IPCPROTO_MAX] = {
#ifdef CONFIG_XENO_DRIVERS_RTIPC_XDDP
[IPCPROTO_XDDP - 1] = &xddp_proto_driver,
#endif
#ifdef CONFIG_XENO_DRIVERS_RTIPC_IDDP
[IPCPROTO_IDDP - 1] = &iddp_proto_driver,
#endif
#ifdef CONFIG_XENO_DRIVERS_RTIPC_BUFP
[IPCPROTO_BUFP - 1] = &bufp_proto_driver,
#endif
};
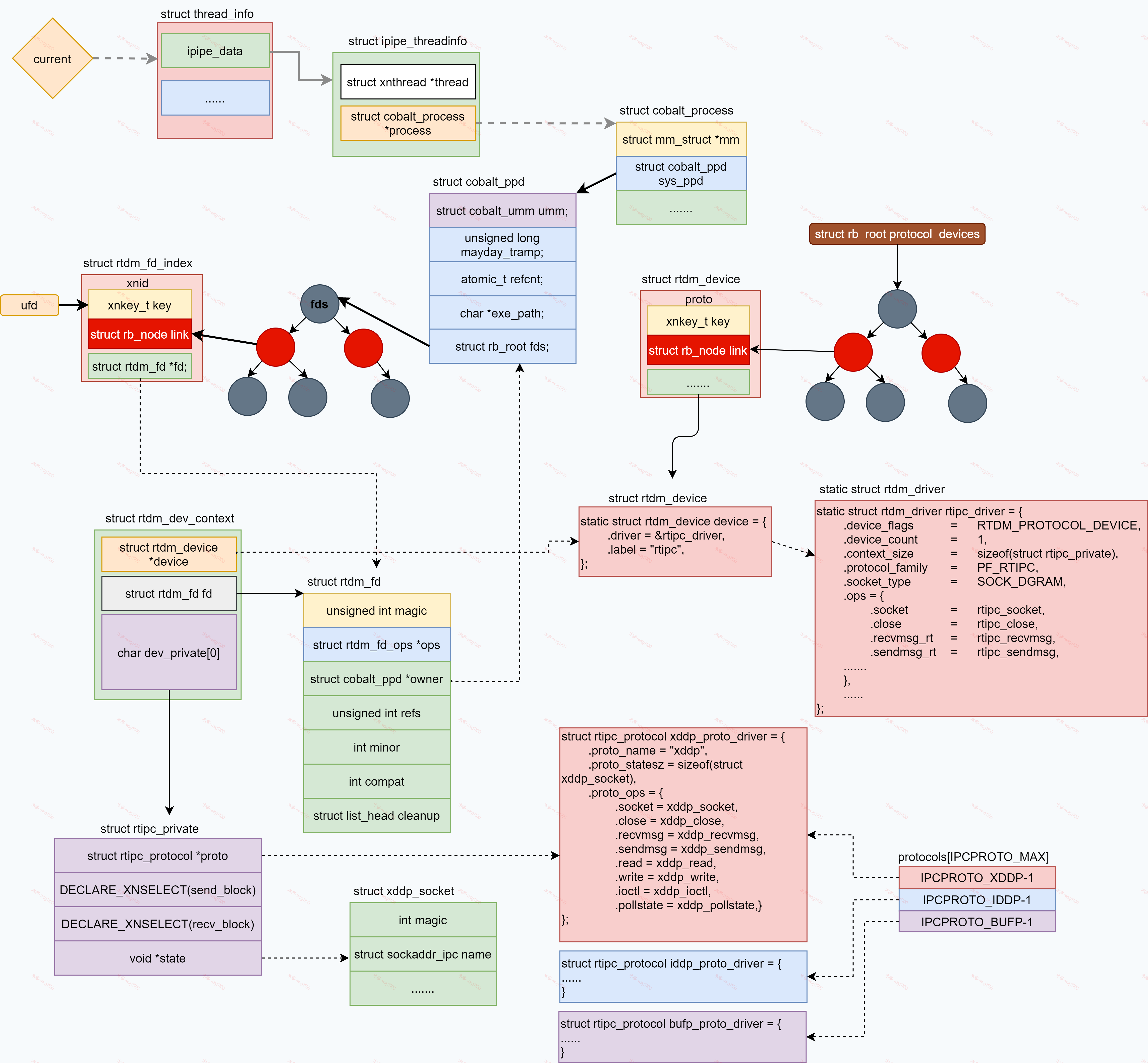
接着根据rtdm_fd得到
rtdm_dev_context内的
dev_private[0],这里先看一下
struct rtipc_private各成员变量的意思:
struct rtipc_private {
struct rtipc_protocol *proto;
DECLARE_XNSELECT(send_block);//struct xnselect send_block
DECLARE_XNSELECT(recv_block);//struct xnselect recv_block
void *state;
};
- proto指向具体的rtipc_protocol
- send_block、send_block是链表,发送或接收阻塞时会插入该链表
- state 与
dev_private[0]
类似,指向不同协议所需的而外空间。对于XDDP说指向sizeof(struct xddp_socket)
大小内存。
得到dev_private[0]后,强制类型转换为
structr tipc_private *priv后开始初始化结构体
tipc_private内各成员.最后调用具体协议的下的
socket(),传入参数fd,对应XDDP协议
xddp_socket(); 到此知道,实时应用对socket描述符的操作最后都是由实时设备驱动中具体函数来完成,后续的配置数据收发等都是按该路径进行执行。
回到xddp socket():
static int xddp_socket(struct rtdm_fd *fd)
{
struct rtipc_private *priv = rtdm_fd_to_private(fd);
struct xddp_socket *sk = priv->state;
sk->magic = XDDP_SOCKET_MAGIC;
sk->name = nullsa; /* Unbound */
sk->peer = nullsa;
sk->minor = -1;
sk->handle = 0;
*sk->label = 0;
sk->poolsz = 0;
sk->buffer = NULL;
sk->buffer_port = -1;
sk->bufpool = NULL;
sk->fillsz = 0;
sk->status = 0;
sk->timeout = RTDM_TIMEOUT_INFINITE;
sk->curbufsz = 0;
sk->reqbufsz = 0;
sk->monitor = NULL;
rtdm_lock_init(&sk->lock);
sk->priv = priv;
return 0;
}
在
xddp_socket()主要初始化
struct xddp_socket,也很重要,后面会详细解析它。
xddp_socket()执行完毕后回到
__rtdm_dev_socket(),接下来调用
rtdm_fd_register()将rdtm_fd并注册到
cobalt_ppd中。
int __rtdm_dev_socket(int protocol_family, int socket_type,
int protocol)
{
......
ret = rtdm_fd_register(&context->fd, ufd);
.....
return ufd;
}
int rtdm_fd_register(struct rtdm_fd *fd, int ufd)
{
struct rtdm_fd_index *idx;
struct cobalt_ppd *ppd;
spl_t s;
int ret = 0;
ppd = cobalt_ppd_get(0);
idx = kmalloc(sizeof(*idx), GFP_KERNEL);
......
idx->fd = fd;
......
ret = xnid_enter(&ppd->fds, &idx->id, ufd);
.....
return ret;
}
3.2 rtdm_fd_index
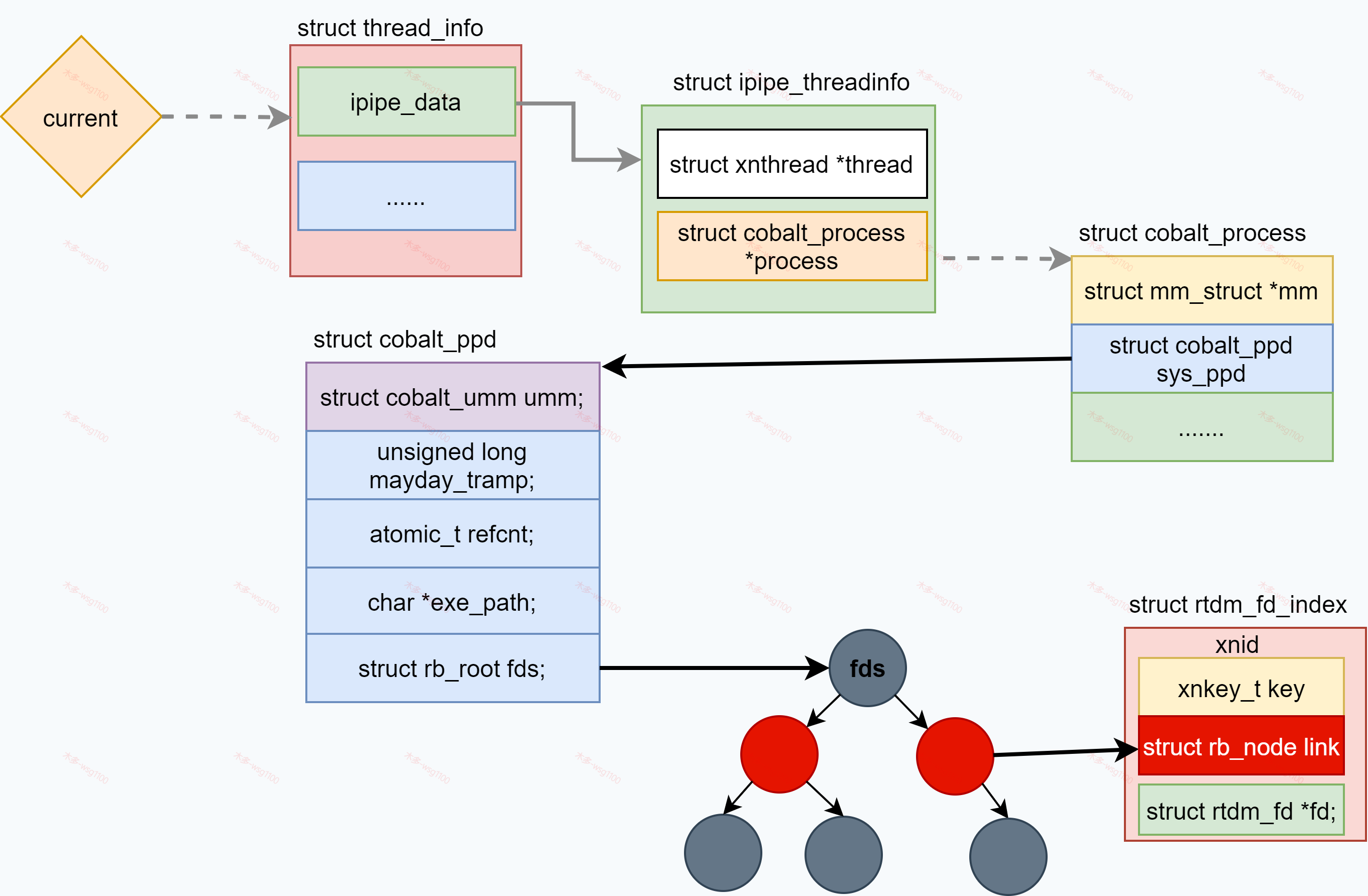
首先获取当前进程的
struct cobalt_ppd,然后分配一个
struct rtdm_fd_index,看名字知道rtdm_fd的index结构,怎么索引呢?通过传入的ufd,传入的ufd作为key,构造一个
rtdm_fd_index,然后插入
ppd->fds,
ppd->fds时一颗红黑树,每个实时任务创建或打开的实时设备fd都是由fds来记录着。
将ufd与rtdm_fd联系起来以后,socket函数执行完毕,返回
ufd,用户空间通过ufd发起内核调用时,就可通过ufd找到内核里相关的所有的结构。
完成各数据结构分配关系链接后,下一步就可以对该socket进行配置了。解析
setsockopt()函数之前,上面图中
struct xddp_socket、
struct cobalt_ppd两个结构体还有没有介绍,如下:
3.3 cobalt_ppd介绍
struct cobalt_ppd(即Cobalt内核调度的实时进程的私有数据 ,Cobalt_process Private data),结构如下:
struct cobalt_ppd {
struct cobalt_umm umm;
unsigned long mayday_tramp;
atomic_t refcnt;
char *exe_path;
struct rb_root fds;
};
umm
该进程内管理的一片内存池,当实时任务内核上下文需要分配内存时,就会从该区域中获取。在xenomai中为避免向linux分配内存影响实时性,xenomai采取的方式是,先向linux分配所需的一片内存,然后再由自己管理该内存的分配释放,管理该内存池的分配释放算法是实时可预测的,从而达到不影响实时性的目的。当实时任务内核上下文需要分配内存时,就会从该区域中获取。关于实时内存堆的管理,可查看本博客其他文章.
struct cobalt_umm {
struct xnheap heap;/*内存池*
atomic_t refcount; /*refcount是该片内存的使用计数*/
void (*release)(struct cobalt_umm *umm);/*release释放函数*/
};
refcnt
cobalt_ppd引用计数,释放的时候使用.fds
是一棵红黑树,保存着该进程打开的实时驱动设备的文件描述符rtdm_fd,可以类比Linux中进程打开的文件描述符集,rtdm_fd结构上面说到过.
xenomai内核中另外两个个heap需要区分一下:
cobalt_kernel_ppd:
Cobalt_process.cobalt_ppd.cobalt_umm内的heap是每个Cobalt进程私有的,除此之外xenomai内核中还有一个全局的
struct cobalt_ppd—cobalt_kernel_ppd,供cobalt内核/内核线程工作过程中的内存分配。
cobalt_heap:xenomai的系统内存池,XDDP数据缓冲区默认从该区域分配。
cobalt_heap,其大小可编译时配置或通过传递内核参数设置,在xenomai内核初始化时从linux分配内存,然后由xenomai初始化管理。
static int __init xenomai_init(void) { ....... ret = sys_init(); ...... }
3.4 xddp_socket
接着看
struct xddp_socket,是XDDP socket核心,管理着XDDP大部分资源,xddp_socket结构体成员及作用如下:
struct xddp_socket {
int magic;
struct sockaddr_ipc name;
struct sockaddr_ipc peer;
int minor;
size_t poolsz;
xnhandle_t handle;
char label[XNOBJECT_NAME_LEN];
struct rtdm_fd *fd; /* i.e. RTDM socket fd */
struct xddp_message *buffer;
int buffer_port;
struct xnheap *bufpool;
struct xnheap privpool;/*非系统内存池*/
size_t fillsz;
size_t curbufsz; /* Current streaming buffer size */
u_long status;
rtdm_lock_t lock;
nanosecs_rel_t timeout; /* connect()/recvmsg() timeout */
size_t reqbufsz; /* Requested streaming buffer size */
int (*monitor)(struct rtdm_fd *fd, int event, long arg);
struct rtipc_private *priv;
};
magic
用来区分该socket类型XDDP_SOCKET_MAGICname
绑定的rtipc套接字地址,peer
表示目标端口。minor
RTIPC端口号。privpool
XDDP本地内存池,仅供xddp通讯使用,其大小为poolsz
,用户空间对该socket调用bind()
前可通过setsocket()
重复更其改大小,bind后无法更改。XDDP收发数据时的数据缓冲区可设置为从该区域分配,默认从xenomai的系统内存池cobalt_heap分配bufpool
数据缓冲区内存池指针,表示从哪个内存池分配数据缓冲区内存,如果设置了 XDDP本地内存池privpool
,则指向privpool
,否则指向xenomai系统内存池cobalt_heap。timeout
实时任务connect()/recvmsg()
超时时间reqbufsz
数据流缓冲区大小。fillsz
:缓冲区内的未读数据长度;status
记录XDDP socket 是否bind等状态信息label
设置该socket的label,设置label后linux端可通过label来与该socket通讯。
这些设置与具体应用息息相关,了解低层原理后,结合具体应用场景来配置xdpp,能更好地发挥XDDP的性能。
4.setsocketopt函数配置XDDP
空间调用
setsocketopt()主要就是对这个结构体中的变量进行设置和修改,需要注意的是,在bind操作前设置才有效,等bind的时候,会按该结构内的资源设置情况进行分配,要多大内存的缓冲区 ,使用的端口是什么,通信过程中从哪里分配内存,这些都是在bind时确定的,而且确定后就不能更改了。
应用空间调用setsocketopt()来设置XDDP socktet,例如设置流缓冲区(XDDP_BUFSZ)大小1024字节。
streamsz = 1024 ret = setsockopt(s, SOL_XDDP, XDDP_BUFSZ,&streamsz, sizeof(streamsz));
与socket()函数一样,是libcobalt库中的函数:
/*lib\cobalt\rtdm.c*/
COBALT_IMPL(int, setsockopt, (int fd, int level, int optname, const void *optval,
socklen_t optlen))
{
struct _rtdm_setsockopt_args args = {
SOL_XDDP, XDDP_BUFSZ, (void *)&streamsz, 4
};
int ret;
ret = do_ioctl(fd, _RTIOC_SETSOCKOPT, &args);
if (ret != -EBADF && ret != -ENOSYS)
return set_errno(ret);
return __STD(s
与socket调用类似,先进行实时系统调用,如果参数非法,返回错误,才会转而尝试从glibc进行linux系统调用。在do_ioctl里直接进行实时系统调用
sc_cobalt_ioctl:
static int do_ioctl(int fd, unsigned int request, void *arg)
{
pthread_setcanceltype(PTHREAD_CANCEL_ASYNCHRONOUS, &oldtype);
ret = XENOMAI_SYSCALL3(sc_cobalt_ioctl, fd, request, arg);
pthread_setcanceltype(oldtype, NULL);
return ret;
}
实时系统调用
sc_cobalt_ioctl位于内核代码
kernel\xenomai\posix\io.c:
COBALT_SYSCALL(ioctl, handover,
(int fd, unsigned int request, void __user *arg))
{
return rtdm_fd_ioctl(fd, request, arg);
}
int rtdm_fd_ioctl(int ufd, unsigned int request, ...)
{
struct rtdm_fd *fd;
fd = get_fd_fixup_mode(ufd);
....
va_start(args, request);
arg = va_arg(args, void __user *);
va_end(args);
set_compat_bit(fd);/*兼容32位应用处理*/
....
err = fd->ops->ioctl_rt(fd, request, arg);
...
rtdm_fd_put(fd);
....
return err;
}
第一个参数ufd是创建socket时返回的ufd,上一节已经与rtdm_fd联系起来,所以直接通过
get_fd_fixup_mode()就能得到
struct rtdm_fd,进而获取所有相关信息。
接着调用fd->ops->ioctl_rt,对于XDDP是
xddp_ioctl()。xddp_ioctl里首先判断接着调用
__xddp_ioctl
static int xddp_ioctl(struct rtdm_fd *fd,
unsigned int request, void *arg)
{
int ret;
......
ret = __xddp_ioctl(fd, request, arg);
}
return ret;
}
static int __xddp_ioctl(struct rtdm_fd *fd,
unsigned int request, void *arg)
{
struct rtipc_private *priv = rtdm_fd_to_private(fd);
struct sockaddr_ipc saddr, *saddrp = &saddr;
struct xddp_socket *sk = priv->state;
int ret = 0;
switch (request) {
COMPAT_CASE(_RTIOC_CONNECT): /*connect操作*/
ret = rtipc_get_sockaddr(fd, &saddrp, arg);
ret = __xddp_connect_socket(sk, saddrp);
break;
COMPAT_CASE(_RTIOC_BIND):/*bind操作*/
ret = rtipc_get_sockaddr(fd, &saddrp, arg);
.......
ret = __xddp_bind_socket(priv, saddrp);
break;
COMPAT_CASE(_RTIOC_GETSOCKNAME):/*获取socket name*/
ret = rtipc_put_sockaddr(fd, arg, &sk->name);
break;
COMPAT_CASE(_RTIOC_GETPEERNAME):/*获取socket name*/
ret = rtipc_put_sockaddr(fd, arg, &sk->peer);
break;
COMPAT_CASE(_RTIOC_SETSOCKOPT):/*配置socket*/
ret = __xddp_setsockopt(sk, fd, arg);
break;
COMPAT_CASE(_RTIOC_GETSOCKOPT):/*获取socket配置*/
ret = __xddp_getsockopt(sk, fd, arg);
break;
case _RTIOC_LISTEN: /*不支持*/
ret = -EOPNOTSUPP;
break;
case _RTIOC_SHUTDOWN:
ret = -ENOTCONN;
break;
......
}
return ret;
}
__xddp_ioctl主要根据request来进行操作,接着执行
__xddp_setsockopt进行具体配置:
static int __xddp_setsockopt(struct xddp_socket *sk,
struct rtdm_fd *fd,
void *arg)
{
int (*monitor)(struct rtdm_fd *fd, int event, long arg);
struct _rtdm_setsockopt_args sopt;
struct rtipc_port_label plabel;
struct timeval tv;
rtdm_lockctx_t s;
size_t len;
int ret;
ret = rtipc_get_sockoptin(fd, &sopt, arg);
......
if (sopt.level == SOL_SOCKET) {
switch (sopt.optname) {
case SO_RCVTIMEO:
ret = rtipc_get_timeval(fd, &tv, sopt.optval, sopt.optlen);
........
sk->timeout = rtipc_timeval_to_ns(&tv);
break;
......
}
return ret;
}
switch (sopt.optname) {
case XDDP_BUFSZ:/*配置buf size*/
........
break;
case XDDP_POOLSZ: /*设置POOLSZ大小 */
........
break;
case XDDP_MONITOR: /*设置 monitor 函数(仅内核应用支持)*/
......
break;
case XDDP_LABEL:/*设置 label*/
......
break;
default:
ret = -EINVAL;
}
return ret;
}
4.1 设置timeout
根据传入的第2、3个参数来决定配置什么,先判断是否是设置
connect()/recvmsg()超时时间,并设置。
4.2 设置流缓冲区大小:
上面说到XDDP提供了流缓冲功能,可以将多次发送的数据累积后作为整个数据包发送。XDDP_BUFSZ就是用来设置该缓冲区的最大大小的。
case XDDP_BUFSZ:
ret = rtipc_get_length(fd, &len, sopt.optval, sopt.optlen);
if (ret)
return ret;
if (len > 0) {
len += sizeof(struct xddp_message);
if (sk->bufpool &&
len > xnheap_get_size(sk->bufpool)) {/*大于可分配内存,返回错误*/
return -EINVAL;
}
}
rtdm_lock_get_irqsave(&sk->lock, s);
sk->reqbufsz = len;
if (len != sk->curbufsz &&
!test_bit(_XDDP_SYNCWAIT, &sk->status) &&
test_bit(_XDDP_BOUND, &sk->status))
ret = __xddp_resize_streambuf(sk); //多次分配,释放原来的然后从xnheap 重新分配
rtdm_lock_put_irqrestore(&sk->lock, s);
break;
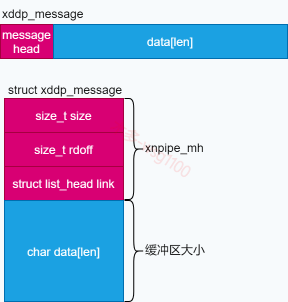
首先从用户空间得到要设置的缓冲区大小保存到变量len,整个缓冲区为
struct xddp_message,由于数据累积期间需要一个message head来管理记录缓冲区内数据的size、offset等信息,这个结构为
struct xnpipe_mh位于
struct xddp_message头部,接着才是缓冲区的数据区,结构如下。
struct xnpipe_mh {
size_t size;
size_t rdoff;
struct list_head link;
};
struct xddp_message {
struct xnpipe_mh mh;
char data[];
};
由于默认从cobalt_heap中分配缓冲区内存,应用需要的缓冲区大小可能大于cobalt_heap的大小,所以建议先设置XDDP本地内存池,然后再配置缓冲区大小。
4.3 设置 XDDP使用的内存池
上面介绍过成员变量,sk->bufpool 数据缓冲区内存池指针,表示从哪个内存池分配数据缓冲区内存,如果设置了 XDDP本地内存池privpool,则指向privpool ,否则指向xenomai系统内存池cobalt_heap。下面看设置 XDDP本地内存池privpool:
case XDDP_POOLSZ: ret = rtipc_get_length(fd, &len, sopt.optval, sopt.optlen); ...... cobalt_atomic_enter(s); if (test_bit(_XDDP_BOUND, &sk->status) || test_bit(_XDDP_BINDING, &sk->status)) ret = -EALREADY; else sk->poolsz = len; cobalt_atomic_leave(s); break;
同样处理传入的参数,将要设置的内存池大小保存到len,判断该socket是否已经bind,因为privpool管理的内存是在bind操作时才真正分配的,现在只是先记录需要分配的大小。如果已经bind是不能再修改带大小的。
4.4 设置XDDP label
除了使用固定端口外,还可通过设置xddp的socket label,linux可通过label来和该 XDDP socket通讯,设置label后bind时其RTIPC端口是系统自动分配的:
case XDDP_LABEL:
if (sopt.optlen < sizeof(plabel))
return -EINVAL;
if (rtipc_get_arg(fd, &plabel, sopt.optval, sizeof(plabel)))
return -EFAULT;
cobalt_atomic_enter(s);
if (test_bit(_XDDP_BOUND, &sk->status) ||
test_bit(_XDDP_BINDING, &sk->status))
ret = -EALREADY;
else {
strcpy(sk->label, plabel.label);
sk->label[XNOBJECT_NAME_LEN-1] = 0;
}
cobalt_atomic_leave(s);
break;
先进行参数检查,然后将label拷贝到
sk->label[]中。
到此针对 xddp 的setsocketopt操作解析完毕,大部分操作为配置
xddp_socket这个结构体;

- 【原创】xenomai内核解析--xenomai与普通linux进程之间通讯XDDP(二)--实时与非实时关联(bind流程)
- 【原创】xenomai内核解析--xenomai与普通linux进程之间通讯XDDP(三)--实时与非实时数据交互
- Linux下进程的创建及其使用管道进行进程之间的通讯[00原创]
- xenomai与普通linux进程之间通信——XDDP(RT->nRT)
- Linux进程的创建函数fork()及其fork内核实现解析
- Linux进程的创建函数fork()及其fork内核实现解析【转】
- xenomai与普通linux进程之间通信——XDDP(nRT->RT)
- 《Linux 内核分析》第六周:分析Linux内核创建一个新进程的过程
- Linux2.6内核进程调度系列--scheduler_tick()函数2.更新实时进程的时间片
- Linux0.11内核--fork()函数创建进程
- 【linux】mkfifo 命令创建命名管道实现进程之间通信
- 全面解析Linux 内核 3.10.x - initramfs 启动流程
- 运用内核创建一个小的linux【壹】--分析linux启动流程
- 解析Xenomai在实时Linux的应用
- Linux内核作业--分析Linux内核创建一个新进程的过程
- java与 C++ 之间进行 SOCKET 通讯要点简要解析
- linux内核分析第六周-分析Linux内核创建一个新进程的过程
- Android 8.0 开机流程 (二) Linux 内核kthreadd进程的启动
- linux内核中socket的创建过程源码分析(详细分析)
- 在 Linux 上实现基于 Socket 的多进程实时通信