学习Linux(33)控制蜂鸣器
GPIO子系统
GPIO是General Purpose I/O的缩写,即通用输入输出端口,简单来说就是MCU/CPU可控制的引脚,这些引脚通常有多种功能,最基本的是高低电平输入检测和输出,部分引脚还会与主控器的片上外设绑定,如作为串口、I2C、网络、电压检测的通讯引脚。
与LED子系统类似,Linux提供了GPIO子系统驱动框架,使用该驱动框架可以把CPU的GPIO引脚导出到用户空间,用户通过访问/sys文件系统进行控制,GPIO子系统支持把引脚用于基本的输入输出功能,其中输入功能还支持中断检测。在Linux内核源码的“Documentation/gpio”目录可找 到关于GPIO子系统的说明。
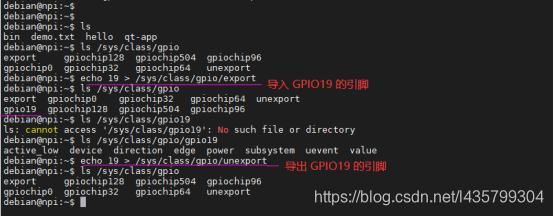
GPIO驱动子系统导出到用户空间的目录是“/sys/class/gpio
#在主机或开发板的终端使用以下命令查看 ls -lh /sys/class/gpio #以下命令不支持在Ubuntu主机上运行 #导出GPIO到用户空间 echo 19 > /sys/class/gpio/export #查看目录的变化,增加了gpio19目录 ls /sys/class/gpio/#把gpio19从用户空间中取消导出 echo 19 > /sys/class/gpio/unexport #查看目录变化,gpio19目录消失了 ls /sys/class/gpio/
常用的属性文件介绍如下:
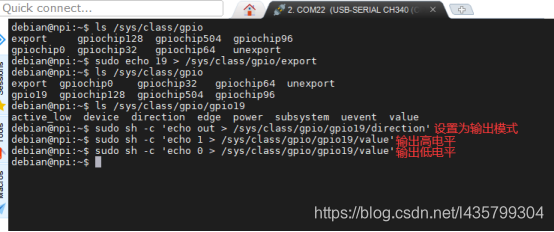
direction文件:表示GPIO引脚的方向,它的可取值如下:
in:引脚为输入模式。
out:引脚为输出模式,且默认输出电平为低。
low:引脚为输出模式,且默认输出电平为低。
high:引脚为输出模式,且默认输出电平为高。
value文件:表示GPIO的电平,1表示高电平,0表示低电平。GPIO被配置为输出 模式, 那么修改该文件的内容可以改变引脚的电平。
edge文件:用于配置GPIO的中断触发方式,当GPIO被配置为中断时,可以通过系统 的poll函数监听。edge文件可取如下的属性值:
none:没有使用中断模式。
rising:表示引脚为中断输入模式,上升沿触发。
falling:表示引脚为中断输入模式,下降沿触发。
both:表示引脚为中断输入模式,边沿触发。
引脚编号转换
i.MX6ULL芯片GPIO引脚名格式通常为GPIOn_IOx,如此处的GPIO1_19或GPIO4_IO20等等,其 中n是端口号,x为该组端口的引脚号,本开发板采用的芯片有15组端口,每组端口包含的引脚从031不等。 本开发板中export文件使用的编号index与GPIO引脚名的转换关系如下:
index = GPIOn_IOx = (n-1)*32 + x
例如蜂鸣器使用的引脚编号为:index = GPIO1_19 = (1-1)*32 +19 = 19。
又例如GPIO4_IO20的编号为:index = GPIO4_IO20 = (4-1)*32+20=116。
要注意并不是所有的引脚都能通过export文件导出到用户空间的,例 如GPIO4_IO20引脚已经被用在了LED设备上。
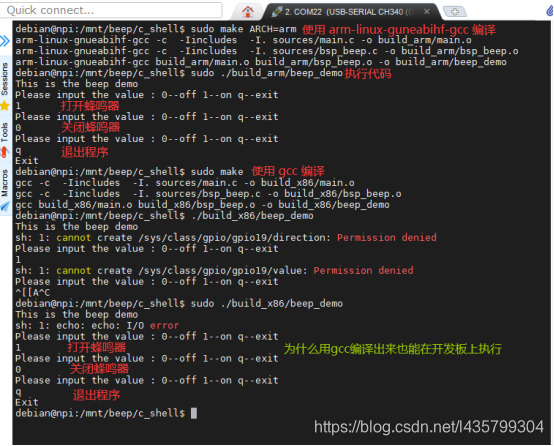
编译过后,使用程序控制蜂鸣器开关。。。但是为什么用 gcc 编译出来也能正常使用。
bsp_beep.h
#ifndef _BSP_BEEP_H_
#define _BSP_BEEP_H_
//蜂鸣器的GPIO引脚号
//imx6的计算方式,GPIOn_IOx = (n-1)*32 + x
//如GPIO1_IO19 = (1-1)*32 + 19 = 19
#define BEEP_GPIO_INDEX "19"
/**
* @brief 初始化蜂鸣器gpio相关
* @return
* @arg 0,正常
* @arg 1,export文件打开错误
* @arg 2,direction文件打开错误
*/
extern int beep_init(void);
/**
* @brief 关闭蜂鸣器gpio的export输出
* @return 0正常,非0,value文件打开错误
*/
extern int beep_deinit(void);
/**
* @brief 蜂鸣器响
* @return 0正常,非0,value文件打开错误
*/
extern int beep_on(void);
/**
* @brief 关闭蜂鸣器gpio的export输出
* @return 0正常,非0,unexport文件打开错误
*/
extern int beep_off(void);
#endif
bsp_beep.c
#include <string.h>
#include <sys/stat.h>
#include <unistd.h>
#include <fcntl.h>
#include "includes/bsp_beep.h"
int beep_init(void)
{
int fd;
//index config
fd = open("/sys/class/gpio/export", O_WRONLY);
if(fd < 0)
return 1 ;
write(fd, BEEP_GPIO_INDEX, strlen(BEEP_GPIO_INDEX));
close(fd);
//direction config
fd = open("/sys/class/gpio/gpio" BEEP_GPIO_INDEX "/direction", O_WRONLY);
if(fd < 0)
return 2;
write(fd, "out", strlen("out"));
close(fd);
return 0;
}
int beep_deinit(void)
{
int fd;
fd = open("/sys/class/gpio/unexport", O_WRONLY);
if(fd < 0)
return 1;
write(fd, BEEP_GPIO_INDEX, strlen(BEEP_GPIO_INDEX));
close(fd);
return 0;
}
int beep_on(void)
{
int fd;
fd = open("/sys/class/gpio/gpio" BEEP_GPIO_INDEX "/value", O_WRONLY);
if(fd < 0)
return 1;
write(fd, "1", 1);
close(fd);
return 0;
}
int beep_off(void)
{
int fd;
fd = open("/sys/class/gpio/gpio" BEEP_GPIO_INDEX "/value", O_WRONLY);
if(fd < 0)
return 1;
write(fd, "0", 1);
close(fd);
return 0;
}
main.c
#include <stdio.h>
#include <unistd.h>
#include "includes/bsp_beep.h"
/**
* @brief 主函数
* @param 无
* @retval 无
*/
int main(int argc, char *argv[])
{
char buf[10];
int res;
printf("This is the beep demo\n");
res = beep_init();
if(res){
printf("beep init error,code = %d",res);
return 0;
}
while(1){
printf("Please input the value : 0--off 1--on q--exit\n");
scanf("%10s", buf);
switch (buf[0]){
case '0':
beep_off();
break;
case '1':
beep_on();
break;
case 'q':
beep_deinit();
printf("Exit\n");
return 0;
default:
break;
}
}
}
Hankin
2020.07.17

- Linux Bash Shell学习(十二):流程控制——select
- Linux Bash Shell学习(十三):流程控制——while/util
- 学习笔记:linuxc第七章—进程控制 下篇
- Linux Bash Shell学习(十一):流程控制——case
- linux学习之进程控制
- 树莓派linux驱动学习之LED控制
- Linux进程线程学习笔记:进程控制
- Linux进程线程学习笔记:进程控制
- Linux进程学习(六)之程控制函数之exec()函数的学习
- Linux学习之Shell--第四天:Shell流程控制-循环语句for
- 轻松学习Linux之理解进程的管理与控制
- Linux重新学习--shell script--控制结构
- 树莓派linux驱动学习之LED控制
- Linux学习~树莓派gpio控制
- linux初级学习之系统服务的控制第八章学习笔记
- 轻松学习Linux之理解进程的管理与控制
- Linux-2.6.32.2内核在mini2440上的移植(十七)---移植PWM控制蜂鸣器驱动
- 【引用】Linux-2.6.32.2内核在mini2440上的移植(十七)---移植PWM控制蜂鸣器驱动
- Linux 学习笔记(十一S)版本控制
- Linux学习之Shell--第五天:Shell流程控制-循环语句while