两轮差速机器人基于PID模型构建与跟踪控制(针对于ROS工程下的下位机后附linux下c++代码)
上几次介绍了两轮差速机器人的数学模型参见我的博客https://blog.csdn.net/qq_40464599/article/details/107176589和只做了关于航向角的闭环PID控制https://blog.csdn.net/qq_40464599/article/details/107239274。
今天这篇文章前几篇会更深入、更具有工程性。
首先,有一个问题我一直有些模糊,最近考虑到工程实现,所以想了一下。ROS标准的Twist速度信息会向下位机发送一个速度V和角速度w,然后我们需要用v和w去控制两个电机。之前的博客已经推导过,利用运动学反解即可,有如下关系
至此,这个博客的核心就说完啦。
别小看这两个公式,vr和vl可以认为是控制电机转速的PWM大小,这样的话就有理有根据的把v和w转换成两个电机的转速信息,妙!
然后我们就要对距离进行比例控制有:
对航向角控制
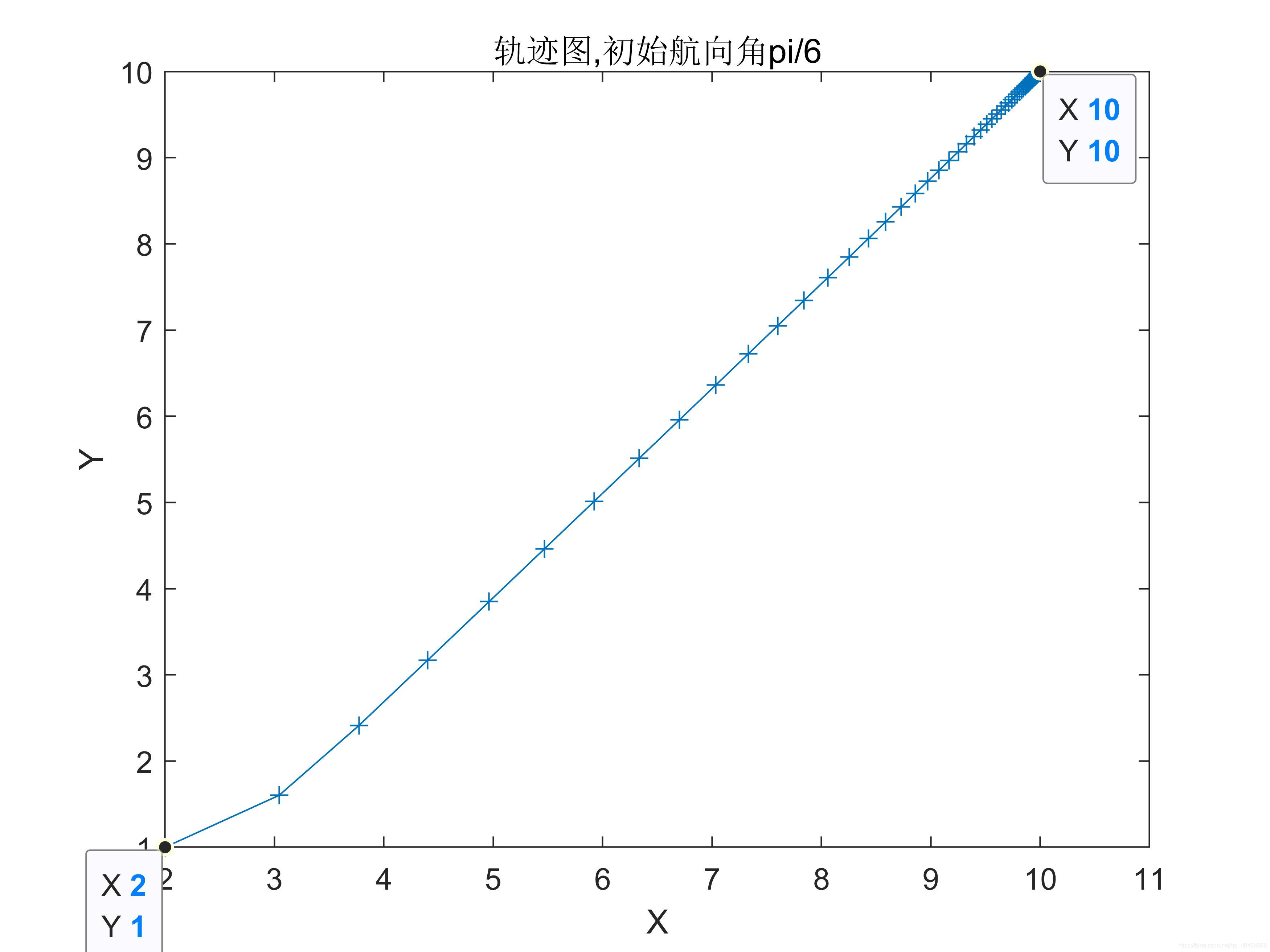
好了,这是我加入的两个闭环控制,显然,你会发现,越靠近目标点,速度越慢。仿真结果相对于上一次真的是好太多,设定终点时(10,10),见下图所示,一点不差走到那里,之前的差不多(10.21,10.21.)是有偏差的。
 https://blog.csdn.net/qq_40464599/article/details/107267774
https://blog.csdn.net/qq_40464599/article/details/107267774具体的工程源码参见我的Github:https://github.com/JackJu-HIT/TrajectoryControl
[code] %%%第一个航向角pid控制器,输出w %%%计算当前与目标的朝向误差 theta_goal=atan((y_goal-y)/(x_goal-x)); theta_error=theta-theta_goal; error_sum=error_sum+theta_error; w=-k*(theta_error)+ki*error_sum+kd*(theta_error-pre_error); pre_error=theta_error; %%%%第二个距离的pid控制器,输出v dist=((x-x_goal)^2+(y-y_goal)^2)^(1/2); v=k2*dist; %%%%控制输入,左电机和右侧电机。 vr=v+w*L/2;%控制输入需要你去更改// vl=v-w*L/2;%控制输入需要你去更改 %%%%process model %%%运动模型 v=(vl+vr)/2;%中心速度 w=(vr-vl)/L; x=x+v*cos(theta)*T; y=y+v*sin(theta)*T; theta=theta+w*T;
上述是我设计的两个PID控制器,用于追踪目标的,设定起点和终点,他会自己寻求一条路线。C++版完整代码请参见我的github:https://github.com/JackJu-HIT/ImuGpsGuiding
但是对于高更加复杂的情况不知道是我没想到还是pid确实有局限性,下一次准备研究MPC控制器。
20200710
鞠春宇
于研究室

- 基于android手机的3G+GPS远程控制模型车工程-android手机编程5-伪视频控制车载手机端程序(代码篇)
- 基于android手机的3G+GPS远程控制模型车工程-android手机编程7-伪视频控制远程手机端程序(代码篇)
- ROS(indigo)国外开源示例包括多机器人控制等基于V-Rep和Gazebo的仿真
- LinuxC/C++编程基础(2) 基于boost::any构建数据容器
- 基于MSRDS机器人仿真平台的多机器人PID编队控制算法
- c++(vs上)与g++(linux下)对于++操作的汇编代码解读
- ROS平台构建:(三)通过键盘或者利用rostopic 发布话题控制机器人运动
- 基于Ubuntu用LFS方法构建Linux操作系统代码及注释(一)
- 基于android手机的3G+GPS远程控制模型车工程-android手机编程2-摇杆控制
- ROS(indigo)国外开源示例包括多机器人控制等基于V-Rep和Gazebo的仿真
- 基于android手机的3G+GPS远程控制模型车工程-android手机编程4-伪视频控制车载手机端程序(文字篇)
- ROS学习笔记------ROS机器人系统设计-----基础编程 day 7 2019/3/2 帅某(URDF机器人建模,urdf功能包的建立,urdf相关模型建立代码已经上传)
- 【ROS-MoveIt!源码学习】ROS中机器人模型的构建(Build RobotModel)
- [置顶] Linux下基于eclipse的C++工程调用caffe的c++接口
- 基于粒子滤波的物体跟踪(应用代码,在LINUX下)
- 基于android手机的3G+GPS远程控制模型车工程-android手机编程6-伪视频控制远程手机端程序(文字篇)
- 基于MSRDS机器人仿真平台的多机器人PID编队控制算法
- 基于MSRDS机器人仿真平台的多机器人PID编队控制算法
- ROS(indigo)国外开源示例包括多机器人控制等基于V-Rep和Gazebo的仿真
- ROS学习--第9篇:ROS机器人建模与仿真---从头构建视觉机器人模型