c++ 知道旋转前后矩阵向量值 求旋转矩阵c++/c#代码 知道两个向量求他们的旋转矩阵
原文作者:aircraft
原文链接:https://www.cnblogs.com/DOMLX/p/12115244.html
知道旋转前后矩阵向量值 如何去求旋转矩阵R 的c++/c#代码???
因为需要用到矩阵处理库所以需要先配置
一、Eigen库的配置(VS2017)
- Eigen库下载: http://eigen.tuxfamily.org/index.php?title=Main_Page
下载文件并解压:

然后在自己的VS工程属性中的这个附加包含进去

注意看清楚了 是D:\Dependencies\eigen-eigen\eigen-eigen; 前面部分是你们自己的路径 后面的这个eigen-eigen\eigen-eigen; 代表的意思解压是点击进去选择里面那个名字跟外面一样的
二、实现代码
c++代码:
#include <cmath>
#include <iostream>
#include "Eigen/Dense"
#include "Eigen/LU"
#include "Eigen/Core"
#define PI 3.1415926
//计算旋转角
double calculateAngle(const Eigen::Vector3d &vectorBefore, const Eigen::Vector3d &vectorAfter)
{
double ab, a1, b1, cosr;
ab = vectorBefore.x()*vectorAfter.x() + vectorBefore.y()*vectorAfter.y() + vectorBefore.z()*vectorAfter.z();
a1 = sqrt(vectorBefore.x()*vectorBefore.x() + vectorBefore.y()*vectorBefore.y() + vectorBefore.z()*vectorBefore.z());
b1 = sqrt(vectorAfter.x()*vectorAfter.x() + vectorAfter.y()*vectorAfter.y() + vectorAfter.z()*vectorAfter.z());
cosr = ab / a1 / b1;
return (acos(cosr) * 180 / PI);
}
//计算旋转轴
inline Eigen::Vector3d calculateRotAxis(const Eigen::Vector3d &vectorBefore, const Eigen::Vector3d &vectorAfter)
{
return Eigen::Vector3d(vectorBefore.y()*vectorAfter.z() - vectorBefore.z()*vectorAfter.y(), \
vectorBefore.z()*vectorAfter.y() - vectorBefore.x()*vectorAfter.z(), \
vectorBefore.x()*vectorAfter.y() - vectorBefore.y()*vectorAfter.x());
}
//计算旋转矩阵
void rotationMatrix(const Eigen::Vector3d &vectorBefore, const Eigen::Vector3d &vectorAfter, Eigen::Matrix3d &rotMatrix)
{
Eigen::Vector3d vector = calculateRotAxis(vectorBefore, vectorAfter);
double angle = calculateAngle(vectorBefore, vectorAfter);
Eigen::AngleAxisd rotationVector(angle, vector.normalized());
Eigen::Matrix3d rotationMatrix = Eigen::Matrix3d::Identity();
rotMatrix = rotationVector.toRotationMatrix();//所求旋转矩阵
}
int main()
{
Eigen::Matrix3d rotMatrix;
Eigen::Vector3d vectorBefore(0,0,1);
Eigen::Vector3d vectorAfter(1,0,0);
rotationMatrix(vectorBefore, vectorAfter, rotMatrix);
std::cout << rotMatrix << std::endl;
system("pause");
return 0;
}
打印结果:

c#代码:
void Calculation(double[] vectorBefore, double[] vectorAfter)
{
double[] rotationAxis;
double rotationAngle;
double[,] rotationMatrix;
rotationAxis = CrossProduct(vectorBefore, vectorAfter);
rotationAngle = Math.Acos(DotProduct(vectorBefore, vectorAfter) / Normalize(vectorBefore) / Normalize(vectorAfter));
rotationMatrix = RotationMatrix(rotationAngle, rotationAxis);
}
double[] CrossProduct(double[] a, double[] b)
{
double[] c = new double[3];
c[0] = a[1] * b[2] - a[2] * b[1];
c[1] = a[2] * b[0] - a[0] * b[2];
c[2] = a[0] * b[1] - a[1] * b[0];
return c;
}
double DotProduct(double[] a, double[] b)
{
double result;
result = a[0] * b[0] + a[1] * b[1] + a[2] * b[2];
return result;
}
double Normalize(double[] v)
{
double result;
result = Math.Sqrt(v[0] * v[0] + v[1] * v[1] + v[2] * v[2]);
return result;
}
double[,] RotationMatrix(double angle, double[] u)
{
double norm = Normalize(u);
double[,] rotatinMatrix = new double[3,3];
u[0] = u[0] / norm;
u[1] = u[1] / norm;
u[2] = u[2] / norm;
rotatinMatrix[0, 0] = Math.Cos(angle) + u[0] * u[0] * (1 - Math.Cos(angle));
rotatinMatrix[0, 0] = u[0] * u[1] * (1 - Math.Cos(angle) - u[2] * Math.Sin(angle));
rotatinMatrix[0, 0] = u[1] * Math.Sin(angle) + u[0] * u[2] * (1 - Math.Cos(angle));
rotatinMatrix[0, 0] = u[2] * Math.Sin(angle) + u[0] * u[1] * (1 - Math.Cos(angle));
rotatinMatrix[0, 0] = Math.Cos(angle) + u[1] * u[1] * (1 - Math.Cos(angle));
rotatinMatrix[0, 0] = -u[0] * Math.Sin(angle) + u[1] * u[2] * (1 - Math.Cos(angle));
rotatinMatrix[0, 0] = -u[1] * Math.Sin(angle) + u[0] * u[2] * (1 - Math.Cos(angle));
rotatinMatrix[0, 0] = u[0] * Math.Sin(angle) + u[1] * u[2] * (1 - Math.Cos(angle));
rotatinMatrix[0, 0] = Math.Cos(angle) + u[2] * u[2] * (1 - Math.Cos(angle));
return rotatinMatrix;
}
三、实现原理
1.旋转角度
已知旋转前向量为P, 旋转后变为Q。由点积定义可知:
 可推出P,Q之间的夹角为:
可推出P,Q之间的夹角为:
2. 旋转轴
由1中可知,旋转角所在的平面为有P和Q所构成的平面,那么旋转轴必垂直该平面。
假定旋转前向量为a(a1, a2, a3), 旋转后向量为b(b1, b2, b3)。由叉乘定义得:

所以旋转轴c(c1, c2, c3)为:

3. 罗德里格旋转公式(Rodrigues' rotation formula)
3.1 公式
已知单位向量
 , 将它旋转θ角。由罗德里格旋转公式,可知对应的旋转矩阵
, 将它旋转θ角。由罗德里格旋转公式,可知对应的旋转矩阵
 :
:

其中I是3x3的单位矩阵,
 是叉乘中的反对称矩阵r:
是叉乘中的反对称矩阵r:

3.2 公式证明
假设在坐标系(x, y, z)中,向量v=ax+by+cz,v绕z轴逆时针旋转θ角后得到新的向量v’。
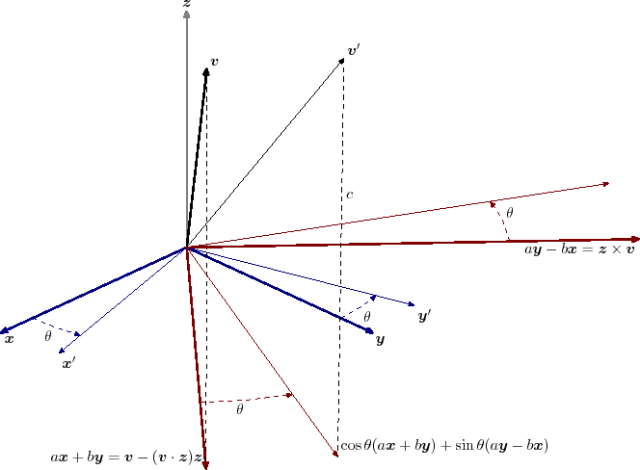
根据2维(x,y)面上的旋转公式可得:
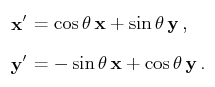
推出:
 已知:
已知:
 将上式带入v’的公式:
将上式带入v’的公式:
 将cz替换掉,可得:
将cz替换掉,可得:

将上式中的叉乘表示为反对称矩阵得:

另外:

最终可以推出:

上式即为罗德里格旋转公式。
参考博客:https://www.geek-share.com/detail/2571917960.html
参考博客里的是c#的实现代码
我是参考完之后改了一个c++的版本出来
若有兴趣交流分享技术,可关注本人公众号,里面会不定期的分享各种编程教程,和共享源码,诸如研究分享关于c/c++,python,前端,后端,opencv,halcon,opengl,机器学习深度学习之类有关于基础编程,图像处理和机器视觉开发的知识


- 坐标系转换之三:欧拉角、四元数、旋转矩阵、方向余弦矩阵、旋转向量、轴角表示
- 3d数学基础-欧拉角转换与旋转矩阵或旋转矩阵转换成欧拉角-用C++代码实现
- 根据旋转前后的向量值求旋转矩阵
- 翻转子串 假定我们都知道非常高效的算法来检查一个单词是否为其他字符串的子串。请将这个算法编写成一个函数,给定两个字符串s1和s2,请编写代码检查s2是否为s1旋转而成,要求只能调用一次检查子串的函数。
- 根据旋转前后的向量值求旋转矩阵
- 根据旋转前后的向量值求旋转矩阵
- 根据旋转前后的向量值求旋转矩阵
- 根据旋转前后的向量值求旋转矩阵
- 矩阵相乘-c++代码实现及运行实例结果
- 《剑指offer》:[7]两个队列实现栈的C++代码实现
- Eigen库:旋转矩阵,旋转向量和四元数的初始化和相互转换
- C#代码中实现两个表(DataTable)的关联查询(JOIN)
- 使用托管C++粘合C#和C++代码
- 我也不知道他是第几次c++作业——代码篇
- c++ 连接两个字符串实现代码 实现类似strcat功能(转)
- 使用托管C++粘合C#和C++代码(二)
- [转]c#有关winform的两个代码片段(多线程操作窗体控件与窗体淡入淡出效果)
- 两个在线编写C++代码的网站
- 两个在线编写C++代码的网站
- 让C++代码与C#代码一起生成一个单一的Assembly