opencv3/C++实现霍夫圆/直线检测
2019-12-12 12:10
190 查看
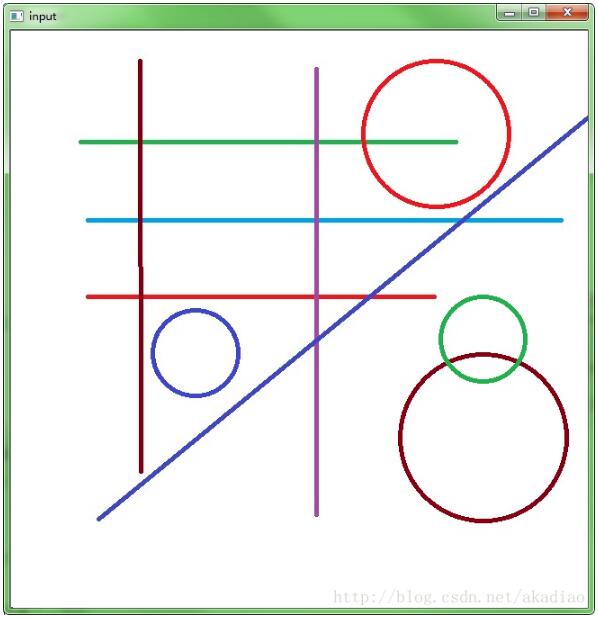
霍夫直线检测
参数说明:
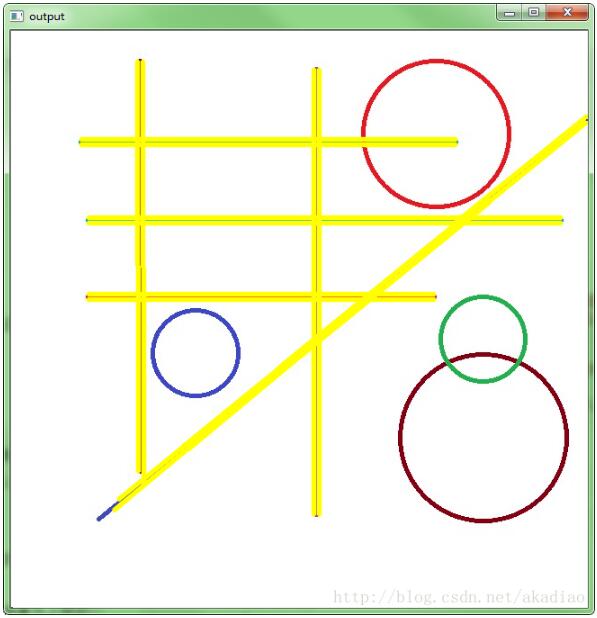
cv::HoughLinesP( InputArray src, // 输入图像(8位灰度图像) OutputArray lines, // 输出直线两点坐标(vector<Vec4i>) double rho, // 生成极坐标时候的像素扫描步长 double theta, //生成极坐标时候的角度步长(一般取CV_PI/180) int threshold, // 累加器阈值,获得足够交点的极坐标点才被看成是直线 double minLineLength=0;// 直线最小长度 double maxLineGap=0;// 直线最大间隔 )
示例:
#include<iostream>
#include<opencv2/opencv.hpp>
using namespace cv;
int main()
{
Mat src, dst;
src = imread("E:/image/image/line.jpg");
if(src.empty())
{
printf("can not load image \n");
return -1;
}
cvNamedWindow("input", CV_WINDOW_AUTOSIZE);
imshow("input", src);
dst = Mat::zeros(src.size(), src.type());
cvtColor(src,dst,CV_RGB2GRAY);
Canny(dst,dst,0,200);
vector<Vec4i> plines;
HoughLinesP(dst, plines, 1, CV_PI/180, 150, 10, 10);
for(size_t i =0; i< plines.size(); i++)
{
Vec4i points = plines[i];
line(src, Point(points[0], points[1]), Point(points[2],points[3]), Scalar(0,255,255), 3, CV_AA);
}
cvNamedWindow("output", CV_WINDOW_AUTOSIZE);
imshow("output", src);
waitKey();
return 0;
}
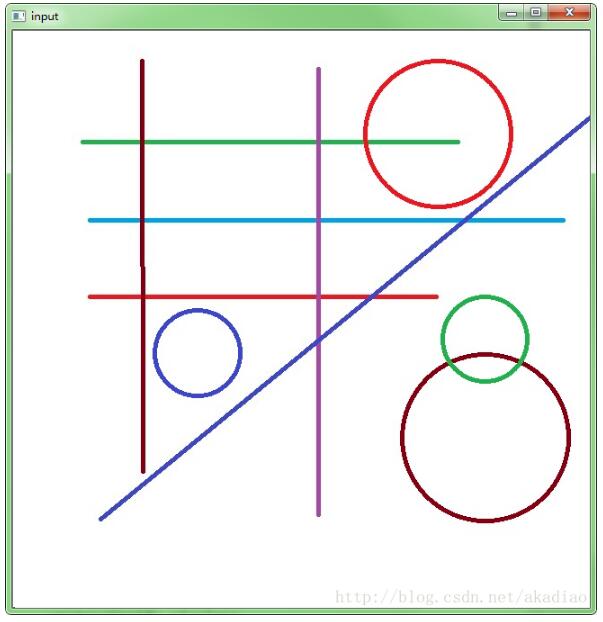
霍夫圆检测
霍夫圆检测对噪声比较敏感,一般要先对图像做中值滤波。
参数说明:
HoughCircles( InputArray image, // 输入图像 ,必须是8位的单通道灰度图像 OutputArray circles, // 输出结果,即圆信息(圆心+半径) Int method, // 采用方法:HOUGH_GRADIENT Double dp, // dp = 1; Double mindist, // 10 最短距离-可以分辨是两个圆的,否则认为是同心圆:src_gray.rows/8 Double param1, // 用于Canny的边缘阀值上限,下限被置为上限的一半 Double param2, // 中心点累加器阈值 Int minradius, // 最小半径 Int maxradius//最大半径 )
示例:
#include<iostream>
#include<opencv2/opencv.hpp>
using namespace cv;
int main()
{
Mat src, dst;
src = imread("E:/image/image/line.jpg");
if(src.empty())
{
printf("can not load image \n");
return -1;
}
cvNamedWindow("input", CV_WINDOW_AUTOSIZE);
imshow("input", src);
cvtColor(src,src,CV_RGB2GRAY);
dst = src.clone();
cvtColor(dst,dst,CV_GRAY2RGB);
//中值滤波
medianBlur(src,src,3);
vector<Vec3f> circles;
HoughCircles(src,circles,CV_HOUGH_GRADIENT,1,100,45,30,45,220);
for(size_t i = 0; i < circles.size(); i++)
{
Vec3f c = circles[i];
circle(dst, Point(c[0], c[1]), c[2], Scalar(0,255,255), 3, CV_AA);
}
cvNamedWindow("output", CV_WINDOW_AUTOSIZE);
imshow("output", dst);
waitKey();
return 0;
}

以上这篇opencv3/C++实现霍夫圆/直线检测就是小编分享给大家的全部内容了,希望能给大家一个参考
您可能感兴趣的文章:

相关文章推荐
- opencv3/C++霍夫圆/直线检测
- 基于C++和OpenCv的SIFT_图像局部特征检测算法代码的实现
- Opencv Hough算法实现图片中直线检测
- Canny边缘检测原理 及 opencv 的 C++ 实现
- OpenCV实现图像的直线检测
- C++opencv实现最小二乘法拟合直线和平面
- 霍夫变换直线检测及opencv实现
- Android(安卓)开发通过NDK调用JNI,使用opencv做本地c++代码开发配置方法实现边缘检测代码(2)
- 基于OpenCV的人脸检测——C++和Python实现
- openCV实现图像的直线检测
- OpenCV2马拉松第22圈——Hough变换直线检测原理与实现
- OpenCV自学笔记31. Android 上使用jni和opencv 实现边缘检测和直线检测
- 霍夫变换直线检测houghlines及opencv的实现分析
- 霍夫变换直线检测houghlines及opencv的实现分析
- opencv2实现多张图片路线路牌(直线和圆)检测并将处理后的图片合成视频_计算机视觉大作业2
- LSD快速直线检测的原理概要及OpenCV代码实现(CV类LineSegmentDetector)
- C++基于OpenCV实现实时监控和运动检测记录
- Java+opencv3.2.0实现hough直线检测
- 霍夫变换检测直线的公式推导以及基于opencv的源代码分析并实例实现
- OpenCV实现傅里叶变换,通过直线检测矫正文本