MPU6050加速度传感器学习笔记之姿态检测
姿态检测
基本概念
在飞行器中,飞行姿态是非常重要的参数, 以飞机自身的中心建立坐标系,当飞机绕坐标轴旋转的时候,会分别影响偏航角、横滚角及俯仰角。
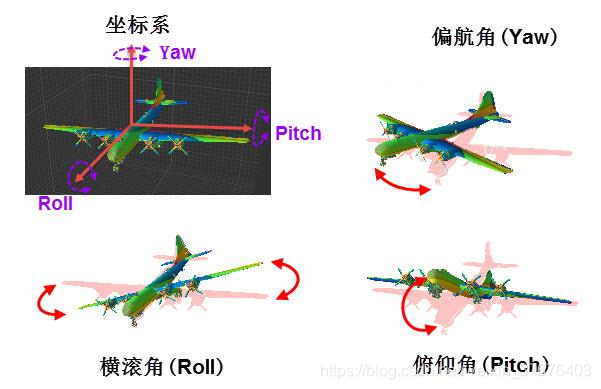
假如我们知道飞机初始时是左上角的状态,只要想办法测量出基于原始状态的三个姿态角的变化量,再进行叠加,就可以获知它的实时姿态了。
坐标系
抽象来说,姿态是“载体坐标系”与“地理坐标系”之间的转换关系。
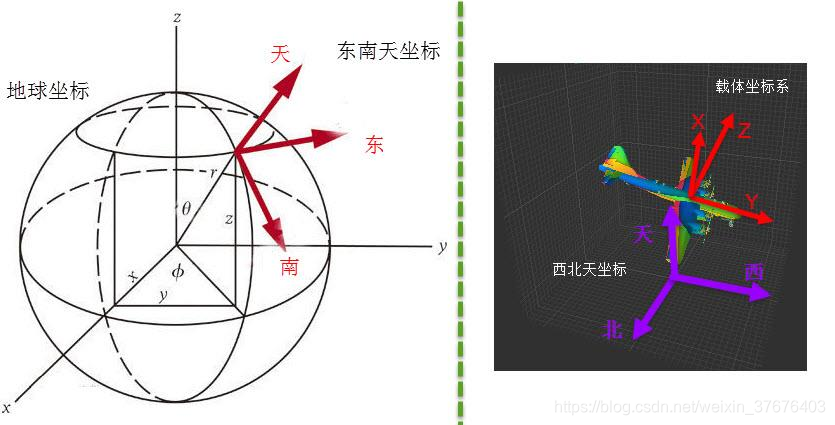
三种常用的坐标系:
• 地球坐标系: 以地球球心为原点, Z轴沿地球自转轴方向, X、 Y轴在赤道平面内的坐标系。
• 地理坐标系: 它的原点在地球表面(或运载体所在的点), Z轴沿当地地理垂线的方向(重力加速度方向), XY轴沿当地经纬线的切线方向。根据各个轴方向的不同,可选为“东北天”、“东南天”、“西北天”等坐标系。这是我们日常生活中使用的坐标系,平时说的东南西北方向与这个坐标系东南西北的概念一致。
• 载体坐标系: 载体坐标系以运载体的质心为原点,一般根据运载体自身结构方向构成坐标系,如Z轴上由原点指向载体顶部, Y轴指向载体头部, X轴沿载体两侧方向。上面说基于飞机建立的坐标系就是一种载体坐标系,可类比到汽车、舰船、人体、动物或手机等各种物体。
• 当飞机绕自身的“Z”轴旋转,该角度就称为偏航角(Yaw);
• 当载体绕自身的“X”轴旋转,该角度称为俯仰角(Pitch);
• 当载体绕自身的“Y”轴旋转,该角度称为横滚角(Roll)。
MEMS:微机械系统
传感器
使用陀螺仪检测角度
陀螺仪是最直观的角度检测器,它可以检测物体绕坐标轴转动的“角速度”,如同将速度对时间积分可以求出路程一样,将角速度对时间积分就可以计算出旋转的“角度”。
陀螺仪检测的缺陷
例如,某种陀螺仪的误差是0.1度/秒,当陀螺仪静止不动时,理想的角速度应为0,无论它静止多久,对它进行积分测量得的旋转角度都是0,这是理想的状态;而由于存在0.1度/秒的误差,当陀螺仪静止不动时,它采样得的角速度一直为0.1度/秒,若静止了1分钟,对它进行积分测量得的旋转角度为6度,若静止了1小时,陀螺仪进行积分测量得的旋转角度就是360度,即转过了一整圈,这就变得无法忍受了。只有当正方向误差和负方向误差能正好互相抵消的时候,才能消除这种累计误差。
利用加速度计检测角度
由于直接用陀螺仪测量角度在长时间测量时会产生累计误差,因而我们又引入了检测倾角的传感器。

测量倾角最常见的例子是建筑中使用的水平仪,在重力的影响下,水平仪内的气泡能大致反映水柱所在直线与重力方向的夹角关系, 利用T字型水平仪,可以检测横滚角与俯仰角,但是偏航角是无法以这样的方式检测的。
在电子设备中,一般使用加速度传感器来检测倾角,它通过检测器件在各个方向的形变情况而采样得到受力数据,根据F=ma转换,传感器直接输出加速度数据,因而被称为加速度传感器。由于地球存在重力场,所以重力在任何时刻都会作用于传感器,当传感器静止的时候(实际上加速度为0),传感器会在该方向检测出加速度g,不能认为重力方向测出的加速度为g,就表示传感器在该方向作加速度为g的运动。
当传感器的姿态不同时,它在自身各个坐标轴检测到的重力加速度是不一样的,利用各方向的测量结果,根据力的分解原理,可求出各个坐标轴与重力之间的夹角。
因为重力方向是与地理坐标系的“天地”轴固连的,所以通过测量载体坐标系各轴与重力方向的夹角即可求得它与地理坐标系的角度旋转关系,从而获知载体姿态。
加速度传感器检测的缺陷
由于这种倾角检测方式是利用重力进行检测的,它无法检测到偏航角(Yaw),原理跟T字型水平仪一样,无论如何设计水平仪,水泡都无法指示这样的角度。
另一个缺陷是加速度传感器并不会区分重力加速度与外力加速度,当物体运动的时候,它也会在运动的方向检测出加速度,特别在震动的状态下,传感器的数据会有非常大的数据变化,此时难以反应重力的实际值。
磁场检测
为了弥补加速度传感器无法检测偏航角(Yaw)的问题,我们再引入磁场检测传感器,它可以检测出各个方向上的磁场大小,通过检测地球磁场,它可实现指南针的功能,所以也被称为电子罗盘。由于地磁场与地理坐标系的“南北”轴固联,利用磁场检测传感器的指南针功能,就可以测量出偏航角(Yaw)了。
磁场检测器的缺陷
与指南针的缺陷一样,使用磁场传感器会受到外部磁场干扰,如载体本身的电磁场干扰,不同地理环境的磁铁矿干扰等等。
GPS检测
使用GPS可以直接检测出载体在地球上的坐标,假如载体在某时刻测得坐标为A,另一时刻测得坐标为B,利用两个坐标即可求出它的航向,即可以确定偏航角,且不受磁场的影响,但这种检测方式只有当载体产生大范围位移的时候才有效(GPS民用精度大概为10米级)。
姿态融合与四元数
可以发现,使用陀螺仪检测角度时,在静止状态下存在缺陷,且受时间影响,而加速度传感器检测角度时,在运动状态下存在缺陷,且不受时间影响,刚好互补。假如我们同时使用这两种传感器,并设计一个滤波算法,当物体处于静止状态时,增大加速度数据的权重,当物体处于运动状时,增大陀螺仪数据的权重,从而获得更准确的姿态数据。
同理,检测偏航角,当载体在静止状态时,可增大磁场检测器数据的权重,当载体在运动状态时,增大陀螺仪和GPS检测数据的权重。这些采用多种传感器数据来检测姿态的处理算法被称为姿态融合。
在姿态融合解算的时候常常使用“四元数”来表示姿态,它由三个实数及一个虚数组成,因而被称之为四元数。使用四元数表示姿态并不直观,但因为使用欧拉角(即前面说的偏航角、横滚角及俯仰角)表示姿态的时候会有“万向节死锁”问题,且运算比较复杂,所以一般在数据处理的时候会使用四元数,处理完毕后再把四元数转换成欧拉角。

- Flash游戏学习笔记:矩形检测碰撞
- 吴恩达深度学习笔记 course4 week3 目标检测
- 《深度学习工程师-吴恩达》03卷积神经网络—目标检测 学习笔记
- JavaScript高程学习笔记之客户端检测(9)
- 论文学习笔记:曹哲 实时多人人体姿态识别 CVPR2017
- OpenCV学习笔记_图片边缘检测
- 深度学习笔记之使用Faster-Rcnn进行目标检测 (实践篇)
- 【OpenCV学习笔记】2.3图像的腐蚀、膨胀、模糊、边缘检测
- 【Unity3D】学习笔记(第7记)射线碰撞检测
- 基础学习笔记之opencv(21):一个简单有趣的皮肤检测代码
- 王爽汇编语言第二版学习笔记之检测点13.1
- 【OpenCV学习笔记】【函数学习】十三(剔除检测到的不符合要求的对象)
- 卷积神经网络—目标检测 学习笔记(下)
- Linux 学习笔记 -- 第五部分 Linux 系统管理员 -- 第21章 系统设置工具(网络与打印机)与硬件检测
- 目标检测 - -DeepLearning.ai 学习笔记(4-3)
- DPI (深度报文检测) 关于DPI的学习笔记
- 图像目标检测与跟踪学习笔记(二)
- OpenCV for Ios 学习笔记(5)-标记检测2
- Opencv2系列学习笔记5(检测Harris角点)
- openCV学习笔记(二)------图像平滑处理和边缘检测