红绿灯动态配时- review on computational intelligence methods for controlling traffic signal timing
A review on computational intelligence methods for controlling traffic signal timing
NLC
LQF(longest queue first)最长序列优先
需要的软件
MATLAB R2011b、PARAMICS v6.8
其他的交通仿真软件VISSIM
单个路口的交通信号控制
QLC(Q-learning controller),NNC(neural network controller),FLC(fuzzy logic controller模糊逻辑控制器)和固定时间控制四种常用的交通信号控制方法。
交叉路口示意图

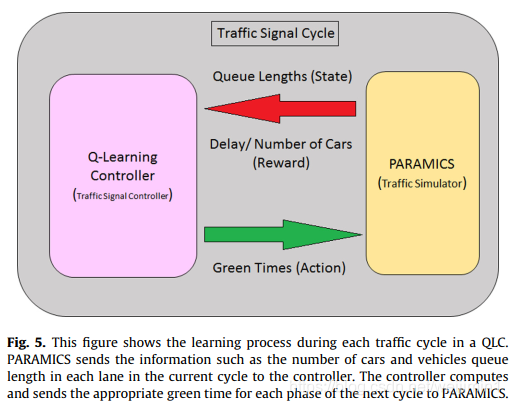
QLC
Q-learning是一种强化学习算法。
QLC的框架图如下
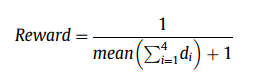
Q-learning的reward函数
Q-learning的其它参数设置

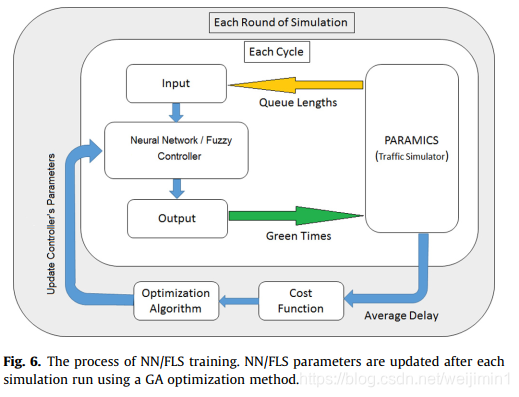
NNC 神经网络控制器
NNC,FLC在每个周期开始就确定红绿灯的时间。
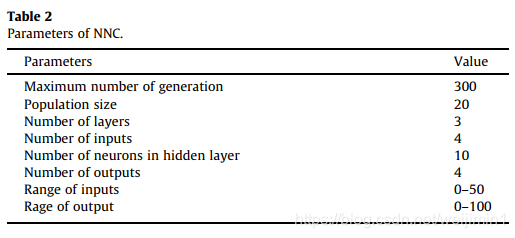
NNC中采用遗传算法(GA)来优化神经网络(NN)的参数,该方法并没有直接计算绿灯时间。神经网络的输入为队列的长度(每一个方向的队列长度4组队列长度,具体是什么时间点的队列长度?),输出为绿灯时间(每一个方向的绿灯时间,4组绿灯时间?)。本次采用的是一个4输入4输出,隐含层为10个的神经网络结构。采用的前向神经网络,是否可以采用RBF神经网络来建立模型?。
每一代中,通过GA为NN计算出新的一组优化参数,通过比较目标函数来确定是否采用新的参数还是放弃新的参数。该目标函数与每一辆车的平均时延(average delay per vehicle)相关。目标函数为当前所有车辆的时延之和。
NNC的参数表
FLC 模糊逻辑控制器
FLC 中的输入同样采用每一组队列的长度,输出为绿灯的长度。
模糊规则的定义中,当前队列(CL),下一个队列(NL),再下一个队列(2NL),之后第三个队列(3NL)。

模糊控制中重要的几个点,模糊化函数、模糊规则、解模糊函数。
模糊规则
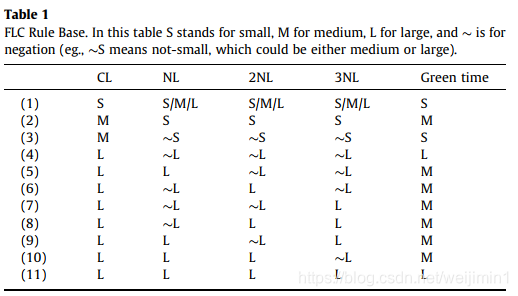
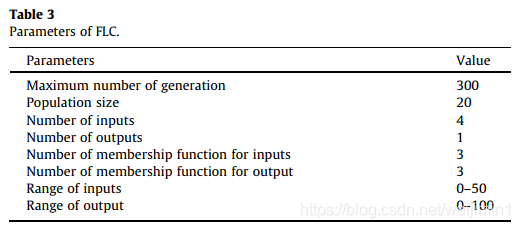
有上图的参数表和模糊规则表可以看出,针对每组方向的绿灯配置都需要一个FLS,因此总共有4个FLS。输入、输出选择的隶属度函数选择都是一致的。隶属度函数选择为高斯函数,高斯函数的均值和方差通过GA(遗传算法)优化得到。
固定时间控制器
每个方向的绿灯时长设置为一样的。
结论
设计两种场景,两种场景都持续5个小时。
- 峰值负载5500辆车。
- 非峰值负载3000辆车。

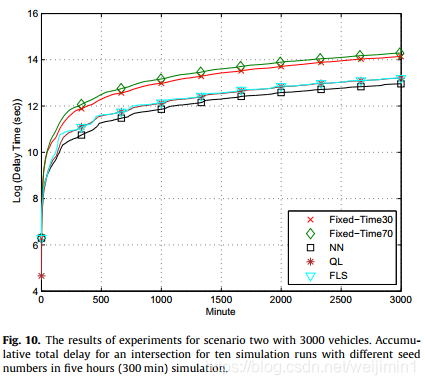
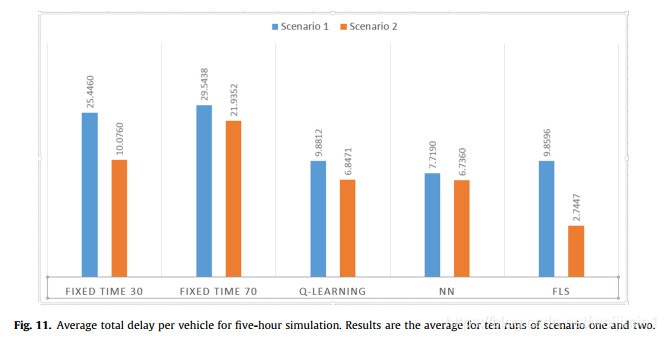

相对与固定时长的控制器,FLC、NNC、QLC分别有74%,71%和66%的提升。

- Uncaught cannot call methods on listview prior to initialization; 在刷新动态内容时报错的解决方案
- QMetaObject::connectSlotsByName: No matching signal for on_pushButton_clicked()
- 读书笔记 - EITantawy2013 - Multiagent RL for Integrated Network of Adaptive Traffic Signal Controllers
- 机器学习文献(一)Systematic Analysis of Machine Learning Algorithms on EEG Data for Brain State Intelligence
- A review of 3D/2D registration methods for image-guided interventions(2)
- Review on EOBD2 ELM327 WIFI for IOS device
- 5、Approximate timing for various operations on a typical PC
- A review of 3D/2D registration methods for image-guided interventions(1)
- Computational Intelligence for Agent-based Systems
- 读书笔记 - Multi-agent Reinforcement Learning for Traffic Signal Control
- office出现错误the setup controller has encountered a problem during install. Please review the log files for further informatin on t
- QMetaObject::connectSlotsByName: No matching signal for on_move_totop_clicked()
- [置顶] facebook Android平台上动态列表的内存优化(Memory optimization for feeds on Android)
- AI 《A PROPOSAL FOR THE DARTMOUTH SUMMER RESEARCH PROJECT ON ARTIFICIAL INTELLIGENCE》读后总结
- QMetaObject::connectSlotsByName: No matching signal for on_pushButton_clicked()
- No matching signal for on_something_event
- intent的startActivityForResult及appcan jar 中 oncallback 方法的使用
- OpenAL SDK for Windows Updated on 12/12/2006
- asp.net下用Aspose.Words for .NET动态生成word文档中的数据表格的方法
- 边缘检测子综述(A review of classic edge detectors[J]. Image Processing On Line, 2012.)