faster-rcnn 之 RPN网络的结构解析
2017-12-25 15:05
459 查看
【首先】:大家应该要了解卷积神经网络的连接方式,卷积核的维度,反向传播时是如何灵活的插入一层;这里我推荐一份资料,真是写的非常清晰,就是MatConvet的用户手册,这个框架底层借用的是caffe的算法,所以他们的数据结构,网络层的连接方式都是一样的;建议读者看看,很快的;
下载链接:点击打开链接
【前面5层】:作者RPN网络前面的5层借用的是ZF网络,这个网络的结构图我截个图放在下面,并分析下为什么是这样子的;
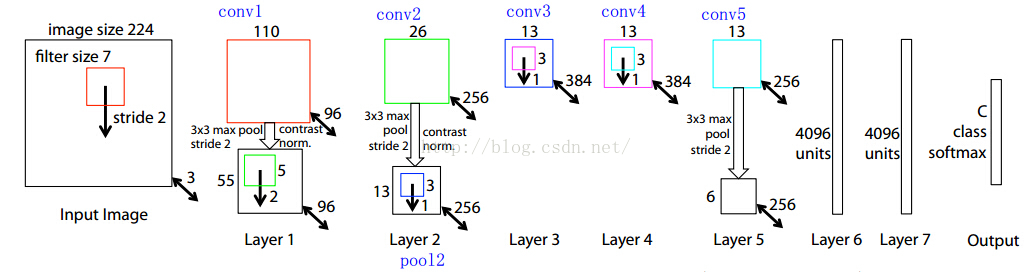
1、首先,输入图片大小是 224*224*3(这个3是三个通道,也就是RGB三种)
2、然后第一层的卷积核维度是 7*7*3*96 (所以大家要认识到卷积核都是4维的,在caffe的矩阵计算中都是这么实现的);
3、所以conv1得到的结果是110*110*96 (这个110来自于 (224-7+pad)/2 +1 ,这个pad是我们常说的填充,也就是在图片的周围补充像素,这样做的目的是为了能够整除,除以2是因为2是图中的stride, 这个计算方法在上面建议的文档中有说明与推导的);
4、然后就是做一次池化,得到pool1, 池化的核的大小是3*3,所以池化后图片的维度是55*55*96 ( (110-3+pad)/2 +1 =55 );
5、然后接着就是再一次卷积,这次的卷积核的维度是5*5*96*256 ,得到conv2:26*26*256;
6、后面就是类似的过程了,我就不详细一步步算了,要注意有些地方除法除不尽,作者是做了填充了,在caffe的prototxt文件中,可以看到每一层的pad的大小;
7、最后作者取的是conv5的输出,也就是13*13*256送给RPN网络的;
【RPN部分】:然后,我们看看RPN部分的结构:

1、前面我们指出,这个conv feature map的维度是13*13*256的;
2、作者在文章中指出,sliding window的大小是3*3的,那么如何得到这个256-d的向量呢? 这个很简单了,我们只需要一个3*3*256*256这样的一个4维的卷积核,就可以将每一个3*3的sliding window 卷积成一个256维的向量;
这里读者要注意啊,作者这里画的示意图 仅仅是 针对一个sliding window的;在实际实现中,我们有很多个sliding window,所以得到的并不是一维的256-d向量,实际上还是一个3维的矩阵数据结构;可能写成for循环做sliding window大家会比较清楚,当用矩阵运算的时候,会稍微绕些;
3、然后就是k=9,所以cls layer就是18个输出节点了,那么在256-d和cls layer之间使用一个1*1*256*18的卷积核,就可以得到cls layer,当然这个1*1*256*18的卷积核就是大家平常理解的全连接;所以全连接只是卷积操作的一种特殊情况(当卷积核的大小是1*1的时候);
4、reg layer也是一样了,reg layer的输出是36个,所以对应的卷积核是1*1*256*36,这样就可以得到reg layer的输出了;
5、然后cls layer 和reg layer后面都会接到自己的损失函数上,给出损失函数的值,同时会根据求导的结果,给出反向传播的数据,这个过程读者还是参考上面给的文档,写的挺清楚的;
【作者关于RPN网络的具体定义】:这个作者是放在./models/pascal_voc/ZF/faster_rcnn_alt_opt/stage1_rpn_train.pt 文件中的;
我把这个文件拿出来给注释下:
[plain] view
plain copy


name: "ZF"
layer {
name: 'input-data' #这一层就是最开始数据输入
type: 'Python'
top: 'data' # top表示该层的输出,所以可以看到这一层输出三组数据,data,真值框gt_boxes,和相关信息im_info
top: 'im_info' # 这些都是存储在矩阵中的
top: 'gt_boxes'
python_param {
module: 'roi_data_layer.layer'
layer: 'RoIDataLayer'
param_str: "'num_classes': 21"
}
}
#========= conv1-conv5 ============
layer {
name: "conv1"
type: "Convolution"
bottom: "data" # 输入data
top: "conv1" # 输出conv1,这里conv1就代表了这一层输出数据的名称,存储在对应的矩阵中
param { lr_mult: 1.0 }
param { lr_mult: 2.0 }
convolution_param {
num_output: 96
kernel_size: 7
pad: 3 # 这里可以看到卷积1层 填充了3个像素
stride: 2
}
}
layer {
name: "relu1"
type: "ReLU"
bottom: "conv1"
top: "conv1"
}
layer {
name: "norm1"
type: "LRN"
bottom: "conv1"
top: "norm1" # 做归一化操作,通俗点说就是做个除法
lrn_param {
local_size: 3
alpha: 0.00005
beta: 0.75
norm_region: WITHIN_CHANNEL
engine: CAFFE
}
}
layer {
name: "pool1"
type: "Pooling"
bottom: "norm1"
top: "pool1"
pooling_param {
kernel_size: 3
stride: 2
pad: 1 # 池化的时候,又做了填充
pool: MAX
}
}
layer {
name: "conv2"
type: "Convolution"
bottom: "pool1"
top: "conv2"
param { lr_mult: 1.0 }
param { lr_mult: 2.0 }
convolution_param {
num_output: 256
kernel_size: 5
pad: 2
stride: 2
}
}
layer {
name: "relu2"
type: "ReLU"
bottom: "conv2"
top: "conv2"
}
layer {
name: "norm2"
type: "LRN"
bottom: "conv2"
top: "norm2"
lrn_param {
local_size: 3
alpha: 0.00005
beta: 0.75
norm_region: WITHIN_CHANNEL
engine: CAFFE
}
}
layer {
name: "pool2"
type: "Pooling"
bottom: "norm2"
top: "pool2"
pooling_param {
kernel_size: 3
stride: 2
pad: 1
pool: MAX
}
}
layer {
name: "conv3"
type: "Convolution"
bottom: "pool2"
top: "conv3"
param { lr_mult: 1.0 }
param { lr_mult: 2.0 }
convolution_param {
num_output: 384
kernel_size: 3
pad: 1
stride: 1
}
}
layer {
name: "relu3"
type: "ReLU"
bottom: "conv3"
top: "conv3"
}
layer {
name: "conv4"
type: "Convolution"
bottom: "conv3"
top: "conv4"
param { lr_mult: 1.0 }
param { lr_mult: 2.0 }
convolution_param {
num_output: 384
kernel_size: 3
pad: 1
stride: 1
}
}
layer {
name: "relu4"
type: "ReLU"
bottom: "conv4"
top: "conv4"
}
layer {
name: "conv5"
type: "Convolution"
bottom: "conv4"
top: "conv5"
param { lr_mult: 1.0 }
param { lr_mult: 2.0 }
convolution_param {
num_output: 256
kernel_size: 3
pad: 1
stride: 1
}
}
layer {
name: "relu5"
type: "ReLU"
bottom: "conv5"
top: "conv5"
}
#========= RPN ============
# 到我们的RPN网络部分了,前面的都是共享的5层卷积层的部分
layer {
name: "rpn_conv1"
type: "Convolution"
bottom: "conv5"
top: "rpn_conv1"
param { lr_mult: 1.0 }
param { lr_mult: 2.0 }
convolution_param {
num_output: 256
kernel_size: 3 pad: 1 stride: 1 #这里作者把每个滑窗3*3,通过3*3*256*256的卷积核输出256维,完整的输出其实是12*12*256,
weight_filler { type: "gaussian" std: 0.01 }
bias_filler { type: "constant" value: 0 }
}
}
layer {
name: "rpn_relu1"
type: "ReLU"
bottom: "rpn_conv1"
top: "rpn_conv1"
}
layer {
name: "rpn_cls_score"
type: "Convolution"
bottom: "rpn_conv1"
top: "rpn_cls_score"
param { lr_mult: 1.0 }
param { lr_mult: 2.0 }
convolution_param {
num_output: 18 # 2(bg/fg) * 9(anchors)
kernel_size: 1 pad: 0 stride: 1 #这里看的很清楚,作者通过1*1*256*18的卷积核,将前面的256维数据转换成了18个输出
weight_filler { type: "gaussian" std: 0.01 }
bias_filler { type: "constant" value: 0 }
}
}
layer {
name: "rpn_bbox_pred"
type: "Convolution"
bottom: "rpn_conv1"
top: "rpn_bbox_pred"
param { lr_mult: 1.0 }
param { lr_mult: 2.0 }
convolution_param {
num_output: 36 # 4 * 9(anchors)
kernel_size: 1 pad: 0 stride: 1 <span style="font-family: Arial, Helvetica, sans-serif;">#这里看的很清楚,作者通过1*1*256*36的卷积核,将前面的256维数据转换成了36个输出</span>
weight_filler { type: "gaussian" std: 0.01 }
bias_filler { type: "constant" value: 0 }
}
}
layer {
bottom: "rpn_cls_score"
top: "rpn_cls_score_reshape" # 我们之前说过,其实这一层是12*12*256的,所以后面我们要送给损失函数,需要将这个矩阵reshape一下,我们需要的是144个滑窗,每个对应的256的向量
name: "rpn_cls_score_reshape"
type: "Reshape"
reshape_param { shape { dim: 0 dim: 2 dim: -1 dim: 0 } }
}
layer {
name: 'rpn-data'
type: 'Python'
bottom: 'rpn_cls_score'
bottom: 'gt_boxes'
bottom: 'im_info'
bottom: 'data'
top: 'rpn_labels'
top: 'rpn_bbox_targets'
top: 'rpn_bbox_inside_weights'
top: 'rpn_bbox_outside_weights'
python_param {
module: 'rpn.anchor_target_layer'
layer: 'AnchorTargetLayer'
param_str: "'feat_stride': 16"
}
}
layer {
name: "rpn_loss_cls"
type: "SoftmaxWithLoss" # 很明显这里是计算softmax的损失,输入labels和cls layer的18个输出(中间reshape了一下),输出损失函数的具体值
bottom: "rpn_cls_score_reshape"
bottom: "rpn_labels"
propagate_down: 1
propagate_down: 0
top: "rpn_cls_loss"
loss_weight: 1
loss_param {
ignore_label: -1
normalize: true
}
}
layer {
name: "rpn_loss_bbox"
type: "SmoothL1Loss" # 这里计算的框回归损失函数具体的值
bottom: "rpn_bbox_pred"
bottom: "rpn_bbox_targets"
bottom: "rpn_bbox_inside_weights"
bottom: "rpn_bbox_outside_weights"
top: "rpn_loss_bbox"
loss_weight: 1
smooth_l1_loss_param { sigma: 3.0 }
}
#========= RCNN ============
# Dummy layers so that initial parameters are saved into the output net
layer {
name: "dummy_roi_pool_conv5"
type: "DummyData"
top: "dummy_roi_pool_conv5"
dummy_data_param {
shape { dim: 1 dim: 9216 }
data_filler { type: "gaussian" std: 0.01 }
}
}
layer {
name: "fc6"
type: "InnerProduct"
bottom: "dummy_roi_pool_conv5"
top: "fc6"
param { lr_mult: 0 decay_mult: 0 }
param { lr_mult: 0 decay_mult: 0 }
inner_product_param {
num_output: 4096
}
}
layer {
name: "relu6"
type: "ReLU"
bottom: "fc6"
top: "fc6"
}
layer {
name: "fc7"
type: "InnerProduct"
bottom: "fc6"
top: "fc7"
param { lr_mult: 0 decay_mult: 0 }
param { lr_mult: 0 decay_mult: 0 }
inner_product_param {
num_output: 4096
}
}
layer {
name: "silence_fc7"
type: "Silence"
bottom: "fc7"
}
anchors作为产生proposal的rpn中的一个重点内容,在Faster R-CNN中被重点介绍,下面我们来学习一下anchors产生部分代码。我主要将其中的部分重点代码展示出来。代码引用自Shaoqing Ren的Matlab下Faster R-CNN。
首先在Faster R-CNN迭代rpn和Fast R-CNN部分训练的前面,有一个产生anchors 的函数,我们称其产生的为base anchor,函数如下:
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
我在实验过程中设置断点,截取自己生成的anchor数值作为例子,如下:
2
3
4
5
6
7
8
9
10
1
2
3
4
5
6
7
8
9
10
可以看出,生成的9个anchor,前三排基本除去一些随机抖动以外不同scale但是ratio相同,均为[-2, -1, 2, 1],中间三排为[-1, -1, 1, 1],最后三排为[-1, -2, 1, 2]。
根据文章,这里即文章所说的9中anchor,即base anchor。
在rpn训练的过程中,针对每一张样本图像的大小与网络,得到所有anchor。
下载链接:点击打开链接
【前面5层】:作者RPN网络前面的5层借用的是ZF网络,这个网络的结构图我截个图放在下面,并分析下为什么是这样子的;
1、首先,输入图片大小是 224*224*3(这个3是三个通道,也就是RGB三种)
2、然后第一层的卷积核维度是 7*7*3*96 (所以大家要认识到卷积核都是4维的,在caffe的矩阵计算中都是这么实现的);
3、所以conv1得到的结果是110*110*96 (这个110来自于 (224-7+pad)/2 +1 ,这个pad是我们常说的填充,也就是在图片的周围补充像素,这样做的目的是为了能够整除,除以2是因为2是图中的stride, 这个计算方法在上面建议的文档中有说明与推导的);
4、然后就是做一次池化,得到pool1, 池化的核的大小是3*3,所以池化后图片的维度是55*55*96 ( (110-3+pad)/2 +1 =55 );
5、然后接着就是再一次卷积,这次的卷积核的维度是5*5*96*256 ,得到conv2:26*26*256;
6、后面就是类似的过程了,我就不详细一步步算了,要注意有些地方除法除不尽,作者是做了填充了,在caffe的prototxt文件中,可以看到每一层的pad的大小;
7、最后作者取的是conv5的输出,也就是13*13*256送给RPN网络的;
【RPN部分】:然后,我们看看RPN部分的结构:
1、前面我们指出,这个conv feature map的维度是13*13*256的;
2、作者在文章中指出,sliding window的大小是3*3的,那么如何得到这个256-d的向量呢? 这个很简单了,我们只需要一个3*3*256*256这样的一个4维的卷积核,就可以将每一个3*3的sliding window 卷积成一个256维的向量;
这里读者要注意啊,作者这里画的示意图 仅仅是 针对一个sliding window的;在实际实现中,我们有很多个sliding window,所以得到的并不是一维的256-d向量,实际上还是一个3维的矩阵数据结构;可能写成for循环做sliding window大家会比较清楚,当用矩阵运算的时候,会稍微绕些;
3、然后就是k=9,所以cls layer就是18个输出节点了,那么在256-d和cls layer之间使用一个1*1*256*18的卷积核,就可以得到cls layer,当然这个1*1*256*18的卷积核就是大家平常理解的全连接;所以全连接只是卷积操作的一种特殊情况(当卷积核的大小是1*1的时候);
4、reg layer也是一样了,reg layer的输出是36个,所以对应的卷积核是1*1*256*36,这样就可以得到reg layer的输出了;
5、然后cls layer 和reg layer后面都会接到自己的损失函数上,给出损失函数的值,同时会根据求导的结果,给出反向传播的数据,这个过程读者还是参考上面给的文档,写的挺清楚的;
【作者关于RPN网络的具体定义】:这个作者是放在./models/pascal_voc/ZF/faster_rcnn_alt_opt/stage1_rpn_train.pt 文件中的;
我把这个文件拿出来给注释下:
[plain] view
plain copy
name: "ZF"
layer {
name: 'input-data' #这一层就是最开始数据输入
type: 'Python'
top: 'data' # top表示该层的输出,所以可以看到这一层输出三组数据,data,真值框gt_boxes,和相关信息im_info
top: 'im_info' # 这些都是存储在矩阵中的
top: 'gt_boxes'
python_param {
module: 'roi_data_layer.layer'
layer: 'RoIDataLayer'
param_str: "'num_classes': 21"
}
}
#========= conv1-conv5 ============
layer {
name: "conv1"
type: "Convolution"
bottom: "data" # 输入data
top: "conv1" # 输出conv1,这里conv1就代表了这一层输出数据的名称,存储在对应的矩阵中
param { lr_mult: 1.0 }
param { lr_mult: 2.0 }
convolution_param {
num_output: 96
kernel_size: 7
pad: 3 # 这里可以看到卷积1层 填充了3个像素
stride: 2
}
}
layer {
name: "relu1"
type: "ReLU"
bottom: "conv1"
top: "conv1"
}
layer {
name: "norm1"
type: "LRN"
bottom: "conv1"
top: "norm1" # 做归一化操作,通俗点说就是做个除法
lrn_param {
local_size: 3
alpha: 0.00005
beta: 0.75
norm_region: WITHIN_CHANNEL
engine: CAFFE
}
}
layer {
name: "pool1"
type: "Pooling"
bottom: "norm1"
top: "pool1"
pooling_param {
kernel_size: 3
stride: 2
pad: 1 # 池化的时候,又做了填充
pool: MAX
}
}
layer {
name: "conv2"
type: "Convolution"
bottom: "pool1"
top: "conv2"
param { lr_mult: 1.0 }
param { lr_mult: 2.0 }
convolution_param {
num_output: 256
kernel_size: 5
pad: 2
stride: 2
}
}
layer {
name: "relu2"
type: "ReLU"
bottom: "conv2"
top: "conv2"
}
layer {
name: "norm2"
type: "LRN"
bottom: "conv2"
top: "norm2"
lrn_param {
local_size: 3
alpha: 0.00005
beta: 0.75
norm_region: WITHIN_CHANNEL
engine: CAFFE
}
}
layer {
name: "pool2"
type: "Pooling"
bottom: "norm2"
top: "pool2"
pooling_param {
kernel_size: 3
stride: 2
pad: 1
pool: MAX
}
}
layer {
name: "conv3"
type: "Convolution"
bottom: "pool2"
top: "conv3"
param { lr_mult: 1.0 }
param { lr_mult: 2.0 }
convolution_param {
num_output: 384
kernel_size: 3
pad: 1
stride: 1
}
}
layer {
name: "relu3"
type: "ReLU"
bottom: "conv3"
top: "conv3"
}
layer {
name: "conv4"
type: "Convolution"
bottom: "conv3"
top: "conv4"
param { lr_mult: 1.0 }
param { lr_mult: 2.0 }
convolution_param {
num_output: 384
kernel_size: 3
pad: 1
stride: 1
}
}
layer {
name: "relu4"
type: "ReLU"
bottom: "conv4"
top: "conv4"
}
layer {
name: "conv5"
type: "Convolution"
bottom: "conv4"
top: "conv5"
param { lr_mult: 1.0 }
param { lr_mult: 2.0 }
convolution_param {
num_output: 256
kernel_size: 3
pad: 1
stride: 1
}
}
layer {
name: "relu5"
type: "ReLU"
bottom: "conv5"
top: "conv5"
}
#========= RPN ============
# 到我们的RPN网络部分了,前面的都是共享的5层卷积层的部分
layer {
name: "rpn_conv1"
type: "Convolution"
bottom: "conv5"
top: "rpn_conv1"
param { lr_mult: 1.0 }
param { lr_mult: 2.0 }
convolution_param {
num_output: 256
kernel_size: 3 pad: 1 stride: 1 #这里作者把每个滑窗3*3,通过3*3*256*256的卷积核输出256维,完整的输出其实是12*12*256,
weight_filler { type: "gaussian" std: 0.01 }
bias_filler { type: "constant" value: 0 }
}
}
layer {
name: "rpn_relu1"
type: "ReLU"
bottom: "rpn_conv1"
top: "rpn_conv1"
}
layer {
name: "rpn_cls_score"
type: "Convolution"
bottom: "rpn_conv1"
top: "rpn_cls_score"
param { lr_mult: 1.0 }
param { lr_mult: 2.0 }
convolution_param {
num_output: 18 # 2(bg/fg) * 9(anchors)
kernel_size: 1 pad: 0 stride: 1 #这里看的很清楚,作者通过1*1*256*18的卷积核,将前面的256维数据转换成了18个输出
weight_filler { type: "gaussian" std: 0.01 }
bias_filler { type: "constant" value: 0 }
}
}
layer {
name: "rpn_bbox_pred"
type: "Convolution"
bottom: "rpn_conv1"
top: "rpn_bbox_pred"
param { lr_mult: 1.0 }
param { lr_mult: 2.0 }
convolution_param {
num_output: 36 # 4 * 9(anchors)
kernel_size: 1 pad: 0 stride: 1 <span style="font-family: Arial, Helvetica, sans-serif;">#这里看的很清楚,作者通过1*1*256*36的卷积核,将前面的256维数据转换成了36个输出</span>
weight_filler { type: "gaussian" std: 0.01 }
bias_filler { type: "constant" value: 0 }
}
}
layer {
bottom: "rpn_cls_score"
top: "rpn_cls_score_reshape" # 我们之前说过,其实这一层是12*12*256的,所以后面我们要送给损失函数,需要将这个矩阵reshape一下,我们需要的是144个滑窗,每个对应的256的向量
name: "rpn_cls_score_reshape"
type: "Reshape"
reshape_param { shape { dim: 0 dim: 2 dim: -1 dim: 0 } }
}
layer {
name: 'rpn-data'
type: 'Python'
bottom: 'rpn_cls_score'
bottom: 'gt_boxes'
bottom: 'im_info'
bottom: 'data'
top: 'rpn_labels'
top: 'rpn_bbox_targets'
top: 'rpn_bbox_inside_weights'
top: 'rpn_bbox_outside_weights'
python_param {
module: 'rpn.anchor_target_layer'
layer: 'AnchorTargetLayer'
param_str: "'feat_stride': 16"
}
}
layer {
name: "rpn_loss_cls"
type: "SoftmaxWithLoss" # 很明显这里是计算softmax的损失,输入labels和cls layer的18个输出(中间reshape了一下),输出损失函数的具体值
bottom: "rpn_cls_score_reshape"
bottom: "rpn_labels"
propagate_down: 1
propagate_down: 0
top: "rpn_cls_loss"
loss_weight: 1
loss_param {
ignore_label: -1
normalize: true
}
}
layer {
name: "rpn_loss_bbox"
type: "SmoothL1Loss" # 这里计算的框回归损失函数具体的值
bottom: "rpn_bbox_pred"
bottom: "rpn_bbox_targets"
bottom: "rpn_bbox_inside_weights"
bottom: "rpn_bbox_outside_weights"
top: "rpn_loss_bbox"
loss_weight: 1
smooth_l1_loss_param { sigma: 3.0 }
}
#========= RCNN ============
# Dummy layers so that initial parameters are saved into the output net
layer {
name: "dummy_roi_pool_conv5"
type: "DummyData"
top: "dummy_roi_pool_conv5"
dummy_data_param {
shape { dim: 1 dim: 9216 }
data_filler { type: "gaussian" std: 0.01 }
}
}
layer {
name: "fc6"
type: "InnerProduct"
bottom: "dummy_roi_pool_conv5"
top: "fc6"
param { lr_mult: 0 decay_mult: 0 }
param { lr_mult: 0 decay_mult: 0 }
inner_product_param {
num_output: 4096
}
}
layer {
name: "relu6"
type: "ReLU"
bottom: "fc6"
top: "fc6"
}
layer {
name: "fc7"
type: "InnerProduct"
bottom: "fc6"
top: "fc7"
param { lr_mult: 0 decay_mult: 0 }
param { lr_mult: 0 decay_mult: 0 }
inner_product_param {
num_output: 4096
}
}
layer {
name: "silence_fc7"
type: "Silence"
bottom: "fc7"
}
anchors作为产生proposal的rpn中的一个重点内容,在Faster R-CNN中被重点介绍,下面我们来学习一下anchors产生部分代码。我主要将其中的部分重点代码展示出来。代码引用自Shaoqing Ren的Matlab下Faster R-CNN。
首先在Faster R-CNN迭代rpn和Fast R-CNN部分训练的前面,有一个产生anchors 的函数,我们称其产生的为base anchor,函数如下:
function anchors = proposal_generate_anchors(cache_name, varargin)
% anchors = proposal_generate_anchors(cache_name, varargin)
% --------------------------------------------------------
% Faster R-CNN
% Copyright (c) 2015, Shaoqing Ren
% Licensed under The MIT License [see LICENSE for details]
% --------------------------------------------------------
%% inputs
ip = inputParser;
ip.addRequired('cache_name', @isstr);
% the size of the base anchor
ip.addParamValue('base_size', 16, @isscalar);
% ratio list of anchors
ip.addParamValue('ratios', [0.5, 1, 2], @ismatrix);
% scale list of anchors
ip.addParamValue('scales', 2.^[3:5], @ismatrix);
ip.addParamValue('ignore_cache', false, @islogical);
ip.parse(cache_name, varargin{:});
opts = ip.Results;
%%
if ~opts.ignore_cache
anchor_cache_dir = fullfile(pwd, 'output', 'rpn_cachedir', cache_name);
mkdir_if_missing(anchor_cache_dir);
anchor_cache_file = fullfile(anchor_cache_dir, 'anchors');
end
try
ld = load(anchor_cache_file);
anchors = ld.anchors;
catch
base_anchor = [1, 1, opts.base_size, opts.base_size];
% 围绕[base_anchor]随机ratios抖动
ratio_anchors = ratio_jitter(base_anchor, opts.ratios);
% 围绕[base_anchor]随机scales抖动
anchors = cellfun(@(x) scale_jitter(x, opts.scales), num2cell(ratio_anchors, 2), 'UniformOutput', false);
anchors = cat(1, anchors{:});
if ~opts.ignore_cache
save(anchor_cache_file, 'anchors');
end
end
end
% 具体ratio_jitter,scale_jitter函数请关注原代码12
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
我在实验过程中设置断点,截取自己生成的anchor数值作为例子,如下:
anchor:9*4 [ -83 -39 100 56 ] [ -175 -87 192 104 ] [ -359 -183 376 200 ] [ -55 -55 72 72 ] [ -119 -119 136 136 ] [ -247 -247 264 264 ] [ -35 -79 52 96 ] [ -79 -167 96 184 ] [ -167 -343 184 360 ]1
2
3
4
5
6
7
8
9
10
1
2
3
4
5
6
7
8
9
10
可以看出,生成的9个anchor,前三排基本除去一些随机抖动以外不同scale但是ratio相同,均为[-2, -1, 2, 1],中间三排为[-1, -1, 1, 1],最后三排为[-1, -2, 1, 2]。
根据文章,这里即文章所说的9中anchor,即base anchor。
在rpn训练的过程中,针对每一张样本图像的大小与网络,得到所有anchor。
function [anchors, im_scales] = proposal_locate_anchors(conf, im_size, target_scale, feature_map_size)
% [anchors, im_scales] = proposal_locate_anchors(conf, im_size, target_scale, feature_map_size)
% --------------------------------------------------------
% Faster R-CNN
% Copyright (c) 2015, Shaoqing Ren
% Licensed under The MIT License [see LICENSE for details]
% --------------------------------------------------------
% generate anchors for each scale
% only for fcn
if ~exist('feature_map_size', 'var')
feature_map_size = [];
end
func = @proposal_locate_anchors_single_scale;
if exist('target_scale', 'var')
[anchors, im_scales] = func(im_size, conf, target_scale, feature_map_size);
else
[anchors, im_scales] = arrayfun(@(x) func(im_size, conf, x, feature_map_size), ...
conf.scales, 'UniformOutput', false);
end
end
function [anchors, im_scale] = proposal_locate_anchors_single_scale(im_size, conf, target_scale, feature_map_size)
if isempty(feature_map_size)
im_scale = prep_im_for_blob_size(im_size, target_scale, conf.max_size);
img_size = round(im_size * im_scale);
% 没有特征图时候,基于前面计算出的output高和宽,计算output_size
output_size = cell2mat([conf.output_height_map.values({img_size(1)}), conf.output_width_map.values({img_size(2)})]);
else
%有特征图时候,直接赋值给output_size
im_scale = prep_im_for_blob_size(im_size, target_scale, conf.max_size);
output_size = feature_map_size;
end
% 针对output的高和宽,产生shift_x,shift_y。
% shift_x大小为1*output列数
shift_x = [0:(output_size(2)-1)] * conf.feat_stride;
% shift_y大小为1*output行数
shift_y = [0:(output_size(1)-1)] * conf.feat_stride;
[shift_x, shift_y] = meshgrid(shift_x, shift_y);
% concat anchors as [channel, height, width], where channel is the fastest dimension.
% 这里意思就是对应output每一个像素处,根据conf.anchors(即前面提到的生成的base anchors)产生一系列anchors
anchors = reshape(bsxfun(@plus, permute(conf.anchors, [1, 3, 2]), ...
permute([shift_x(:), shift_y(:), shift_x(:), shift_y(:)], [3, 1, 2])), [], 4);
% equals to
% anchors = arrayfun(@(x, y) single(bsxfun(@plus, conf.anchors, [x, y, x, y])), shift_x, shift_y, 'UniformOutput', false);
% anchors = reshape(anchors, [], 1);
% anchors = cat(1, anchors{:});
end
相关文章推荐
- faster-rcnn 中的RPN网络的结构解析
- faster-rcnn 之 RPN网络的结构解析以及RPN代码详解
- faster-rcnn 之 RPN网络的结构解析
- faster-rcnn 之 RPN网络的结构解析
- faster-rcnn 之 RPN网络的结构解析
- 【caffe】基本数据结构blob说明,用faster-rcnn 之 RPN网络的结构解析进行说明
- faster-rcnn 之 RPN网络的结构解析
- faster-rcnn 之 RPN网络的结构解析
- faster-rcnn之RPN网络的结构解析
- faster-rcnn 之 RPN网络的结构解析以及RPN代码详解
- faster-rcnn 之 RPN网络的结构解析
- RPN结构解析 ( faster-rcnn )
- py-faster-rcnn流程(2)——训练RPN网络一阶段
- py-faster-rcnn流程(3)——根据RPN网络的输出获取ROI
- py-faster-rcnn流程(5)——训练RPN网络二阶段
- faster rcnn源码理解(二)之AnchorTargetLayer(网络中的rpn_data)
- Faster-RCNN中RPN层解析以及相关网址收藏
- Check rpn proposals in faster-rcnn
- faster-rcnn中utils下几个重要函数的解析
- Caffe下py-faster-rcnn使用残差网络Resnet进行训练