吴恩达深度学习笔记之卷积神经网络(卷积网络)
2017-12-18 16:33
761 查看
1.1 计算机视觉(computer vision)
应用计算机视觉存在一个挑战:就是数据的输入可能会非常大,例如,过去一般的操作是64*64的小图片,实际上它的数据量是64*64*3,因为每张图片还有3个颜色通道,如果计算一下,可以得知数据量是12288,所以我们的特征向量X维度是12288,这其实不算大,但是如果操作更大的图片,比如一张1000*1000的图片,则其特征向量维度X为1000*1000*3,所以数字将会是300万,此时,假设隐藏层神经元个数也为1000,此时 矩阵是(1000,3m)为3billion,这是一个非常庞大的数字,会导致神经网络很容易发生过拟合,而且神经网络巨大的内存需求也让人不可接受。但是对于计算机视觉来说,我们肯定不希望它只能处理小图片,我们希望它能处理大图,为此,我们需要进行卷积运算,她是卷积神经网络中非常重要的一块。计算机视觉有如下几个应用:图片分类,目标检测,以及最近新出来的一种艺术形式,图片风格转换。
图片分类
风格转换
目标检测
1.2 边缘检测示例(Edge detection example)
卷积运算是卷积圣经网络中最最基本的组成部分,接下来我们使用边缘检测作为入门样例。
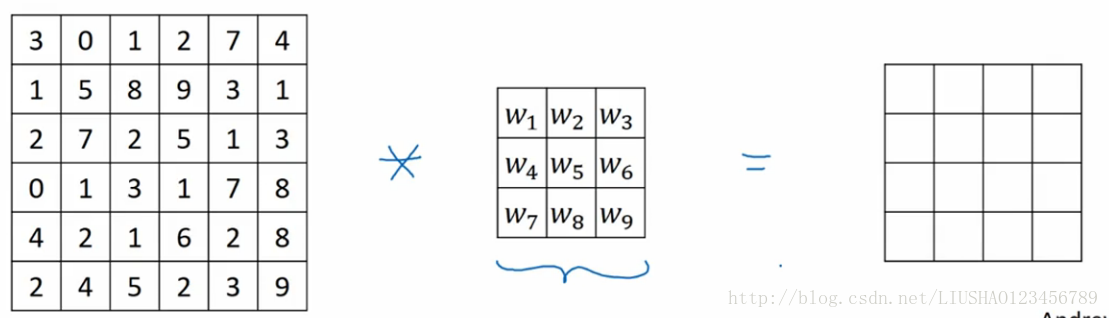
下图是具体细节:
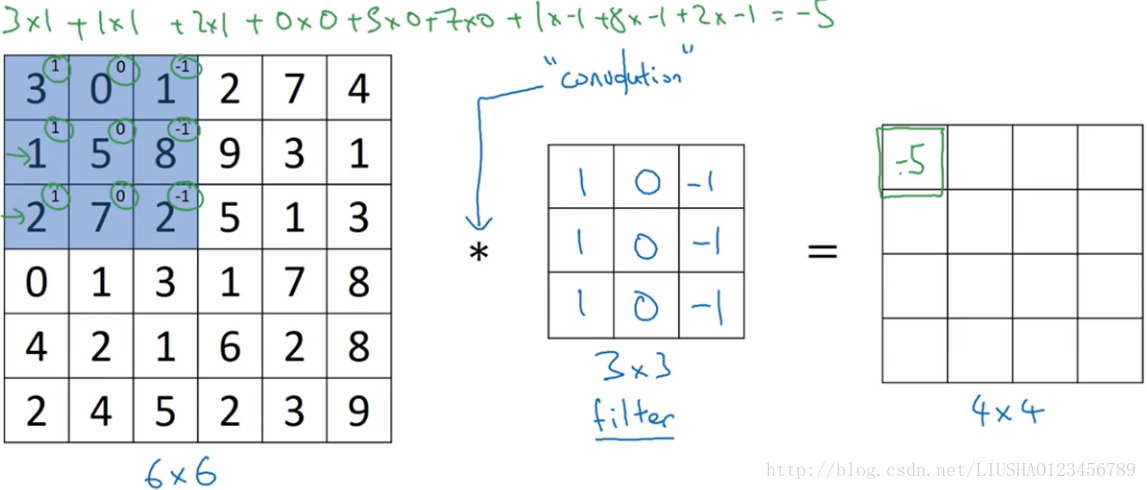
上图左边为一个二值图,故其为单通道,“*”表示一个卷积运算,它也是卷积运算的标准标志,中间的为一个过滤器,在论文中有时也称为核,右边是卷积得到的结果。以上就是一个垂直边缘检测器。为什么可以做垂直边缘检测呢,来看如下例子。

如果把右边看成一副图片,则右图下边的小图,像素值10是比较亮的一部分,左图右边像素值比较暗,在此使用灰色,这个图像里有特别明显的垂直边缘,这条垂直线是从黑到白的过度线。中间是一个过滤器,右图是结果,结果中我们可以看到垂直边缘检测出来了,但是检测到的边缘太粗,这是因为图片太小,如果我们用1000*1000的图片,我们会发现其会很好的检测出图像中的垂直边缘。
1.3 更多边缘检测例子(more edge detection)
上一节中已经见识到用卷积运算实现垂直边缘检测,在这节中,我们将学习如何区别正边到负边,这实际上就是由亮到暗于由暗到亮的区别,也就是边缘的过度。
上图左边为一个垂直边缘过滤器,右边是水平边缘过滤器。通过使用不同的滤波器,可以找出垂直的或是水平的边缘。但实际上,对于这样一个3*3的滤波器来说,我们只使用了一种数字组合。但在历史当中,曾经争论过怎么样的数字组合才是最好的滤波器。我们还可以使用下面两种滤波器。

左图称为sobel filter,它的优点在于增加了中间一行元素的权值,会使得结果鲁棒性更高。右图则叫做scharr filter,他有着和之前完全不同的特性,实际上他也是一种垂直边缘检测。
随着深度学习的发展,就是当我们真正去检测复杂图像的边缘,我们不需要去使用研究者们所选择的这9个数字,我们可以把这9个数字当成9个参数,然后使用反向传播算法,让其去理解这9个参数,这样的话,可以得到一个出色的边缘检测。这种滤波器相比于单纯的垂直边缘和水平边缘,他可以检测出45°,70°,甚至是任何角度的边缘,可以将矩阵的所有数字都设置成参数,通过数据反馈,让神经网络自动去学习,学习到一些比较低级的特征。
如图所示:
1.4 padding
为了构建深度神经网络,我们需要学会的一个基本操作就padding。
在上一节中,我们知道边缘像素点只被一次输出所触碰或者所使用,但是中间的像素点会被使用多次。
上一节中,如果我们用3*3的过滤器,卷积一个6*6的图像,最后会得到一个4*4的输出,这背后的数学解释是如果我们用n*n的图像,用一个f*f的过滤器做卷积,那么输出结果的维度是(n-f+1)*(n-f+1)。这样做如下两个缺点。
缺点一:
每次做卷积操作,图像就会缩小,从6*6缩小到4*4,经过几次卷积之后,图像会更小。直到可能变成1*1缺点二:
如果我们注意角落边缘的像素,这个像素只被一个输出所触碰或者所使用,但是如果是中间的像素点就会有许多3*3的区域与之重叠,所以那些在角落或者边缘的区域的像素点,在输出中采用较少,意味着丢掉了图像边缘位置的许多信息。为了解决以上两个缺点,我们可以在卷积操作之前,填充这副图像,在上述6*6矩阵中,再填充一层像素,此时就变成了8*8的图像,此时经过卷积之后,得到的输出不再是4*4,而依然是6*6的图像,习惯上我们用0去填充。至于填充多少像素,通常有两个选择。分别叫做valid卷积和same卷积。
valid卷积:
valid卷积意味着不填充,此时如果输入图像为n*n,过滤器为f f,则输出为(n-f+1)(n-f+1)same卷积:
意味着填充之后,输入和输出之后大小是一样的。根据上述公式,当我们填充p个像素点,此时输出大小为(n+2p-f+1)*(n+2p-f+1),为了让输入与输出相等即n+2p-f+1=n,可知
p=(f−1)/2
所以当f是奇数时,只要选择相应的填充尺寸,就能确保得到和输入相同尺寸的输出。
1.5 卷积步长(strided convolutions)
我们首先看一个卷积步长的样例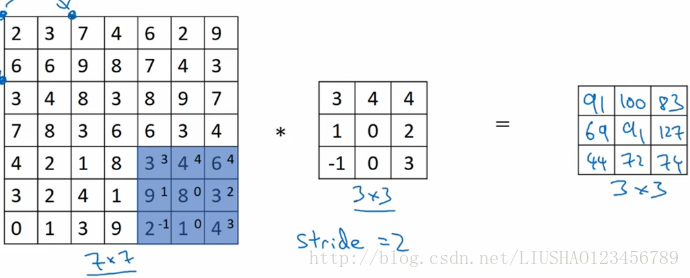
卷积中的步幅是另一个构建卷积神经网络的基本操作,输入和输出的维度由以下公式决定:
(n+2p−fs+1)×(n+2p−fs+1)
s表示步长,如果商不是整数我们选择向下取整。
1.6 卷积中“卷”的体现指出(Convolutions over volumes)
上节中讲到如何在灰度图上做卷积,这节中讲如何在彩色图中做卷积。为了检测图像的边缘,或者一些其他的特征,不是把他跟原来的3*3的过滤器做卷积,而是跟一个三维的过滤器做卷积,它的维度是3*3*3,对应红绿蓝三个通道。如图所示:
注意:图像的通道数和过滤器的通道数必须一致。
那么这个能干什么呢?
举个例子,这个过滤器是3*3*3,如果我们检测图像红色通道的边缘,那么我们可以将第一个过滤器设置为如下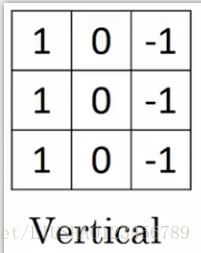
而绿色通道全为0,蓝色通道也全为0,这样,如果我们把这三个堆叠在一起,形成一个3*3*3的过滤器,那么这就是一个检测边界,但只对红色通道有用。
按照计算机视觉的惯例,如果输入有不同的高,宽,过滤器也可以有不同的高,宽,但是通道数必须一样。
还有一个概念,对建立卷积神经网络至关重要,就是我们如果想同时检测垂直和水平边缘,还有45度或者70度边缘该怎么做。此时我们需要为过滤器设置深度。如图所示:

1.7 单层卷积网络(one layer of a convolutional network)
上节,我们知道了如何通过连个过滤器卷积处理一个三维图像,并输出两个4*4的矩阵,假设使用第一个过滤器进行卷积,得到一个4*4的矩阵,使用第二个过滤器得到另外一个4*4的矩阵,最终各自形成一个卷积神经网络层,然后增加偏差bias,它是一个实数,通过python广播机制,给这16个元素加上同一偏差,然后应用非线性函数Relu。同理,对第二个也进行同样的操作,并将两个4*4堆叠在一起,得到4*4*2的矩阵。具体流程如图所示: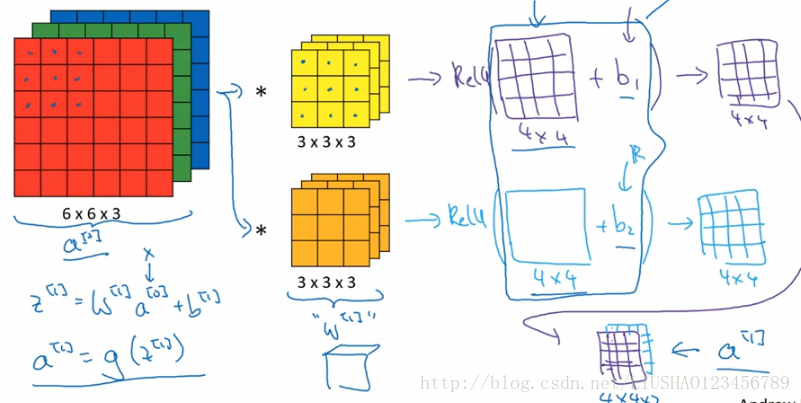
Summary of notation
在这里就不具体写了,直接用图片来做总结
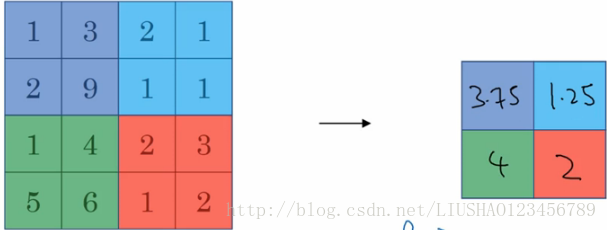
1.8 池化层(pooling layers)
池化层可以缩减模型的大小,提高计算速度,同事提高所提取特征的鲁棒性。一般分为两种分别为max pooling 和 average pooling。我们首先来看最大池化。最大池化作用实际就是,如果在过滤器中提取到某个特征,那么保留其最大值,绝大多数用的是最大池化,因为其实验效果比平均池化要好。如图为最大池化:

另一种为平均池化如图所示:
此外需要说明的是,池化层中包含两个超参数,如下:
f:filter size
s:stride
常用的参数值为f=2,s=2
1.9 why convolutions?
和只用全连接层相比,卷积神经网络有两个优势分别为参数共享和稀疏连接。以下为一简单的卷积神经网络的架构。

由于不依赖于框架的卷积神经网络的代码叫长,这里就只粘贴一下基于tensorflow框架的简单卷积神经网络对mnist数据集的分类代码。如下:
import numpy as np
import tensorflow as tf
import matplotlib.pyplot as plt
import input_data
mnist = input_data.read_data_sets('data/', one_hot=True)
trainimg = mnist.train.images
trainlabel = mnist.train.labels
testimg = mnist.test.images
testlabel = mnist.test.labels
print ("MNIST ready")
n_input = 784
n_output = 10
weights = {
'wc1': tf.Variable(tf.random_normal([3, 3, 1, 64], stddev=0.1)),
'wc2': tf.Variable(tf.random_normal([3, 3, 64, 128], stddev=0.1)),
'wd1': tf.Variable(tf.random_normal([7*7*128, 1024], stddev=0.1)),
'wd2': tf.Variable(tf.random_normal([1024, n_output], stddev=0.1))
}
biases = {
'bc1': tf.Variable(tf.random_normal([64], stddev=0.1)),
'bc2': tf.Variable(tf.random_normal([128], stddev=0.1)),
'bd1': tf.Variable(tf.random_normal([1024], stddev=0.1)),
'bd2': tf.Variable(tf.random_normal([n_output], stddev=0.1))
}
def conv_basic(_input, _w, _b, _keepratio):
# INPUT
_input_r = tf.reshape(_input, shape=[-1, 28, 28, 1])
# CONV LAYER 1
_conv1 = tf.nn.conv2d(_input_r, _w['wc1'], strides=[1, 1, 1, 1], padding='SAME')
#_mean, _var = tf.nn.moments(_conv1, [0, 1, 2])
#_conv1 = tf.nn.batch_normalization(_conv1, _mean, _var, 0, 1, 0.0001)
_conv1 = tf.nn.relu(tf.nn.bias_add(_conv1, _b['bc1']))
_pool1 = tf.nn.max_pool(_conv1, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding='SAME')
_pool_dr1 = tf.nn.dropout(_pool1, _keepratio)
# CONV LAYER 2
_conv2 = tf.nn.conv2d(_pool_dr1, _w['wc2'], strides=[1, 1, 1, 1], padding='SAME')
#_mean, _var = tf.nn.moments(_conv2, [0, 1, 2])
#_conv2 = tf.nn.batch_normalization(_conv2, _mean, _var, 0, 1, 0.0001)
_conv2 = tf.nn.relu(tf.nn.bias_add(_conv2, _b['bc2']))
_pool2 = tf.nn.max_pool(_conv2, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding='SAME')
_pool_dr2 = tf.nn.dropout(_pool2, _keepratio)
# VECTORIZE
_dense1 = tf.reshape(_pool_dr2, [-1, _w['wd1'].get_shape().as_list()[0]])
# FULLY CONNECTED LAYER 1
_fc1 = tf.nn.relu(tf.add(tf.matmul(_dense1, _w['wd1']), _b['bd1']))
_fc_dr1 = tf.nn.dropout(_fc1, _keepratio)
# FULLY CONNECTED LAYER 2
_out = tf.add(tf.matmul(_fc_dr1, _w['wd2']), _b['bd2'])
# RETURN
out = { 'input_r': _input_r, 'conv1': _conv1, 'pool1': _pool1, 'pool1_dr1': _pool_dr1,
'conv2': _conv2, 'pool2': _pool2, 'pool_dr2': _pool_dr2, 'dense1': _dense1,
'fc1': _fc1, 'fc_dr1': _fc_dr1, 'out': _out
}
return out
print ("CNN READY")
a = tf.Variable(tf.random_normal([3, 3, 1, 64], stddev=0.1))
print (a)
a = tf.Print(a, [a], "a: ")
init = tf.global_variables_initializer()
sess = tf.Session()
sess.run(init)
#sess.run(a)
x = tf.placeholder(tf.float32, [None, n_input])
y = tf.placeholder(tf.float32, [None, n_output])
keepratio = tf.placeholder(tf.float32)
# FUNCTIONS
_pred = conv_basic(x, weights, biases, keepratio)['out']
cost = tf.reduce_mean(tf.nn.softmax_cross_entropy_with_logits(_pred, y))
optm = tf.train.AdamOptimizer(learning_rate=0.001).minimize(cost)
_corr = tf.equal(tf.argmax(_pred,1), tf.argmax(y,1))
accr = tf.reduce_mean(tf.cast(_corr, tf.float32))
init = tf.global_variables_initializer()
# SAVER
print ("GRAPH READY")
sess = tf.Session()
sess.run(init)
training_epochs = 15
batch_size = 16
display_step = 1
for epoch in range(training_epochs):
avg_cost = 0.
#total_batch = int(mnist.train.num_examples/batch_size)
total_batch = 10
# Loop over all batches
for i in range(total_batch):
batch_xs, batch_ys = mnist.train.next_batch(batch_size)
# Fit training using batch data
sess.run(optm, feed_dict={x: batch_xs, y: batch_ys, keepratio:0.7})
# Compute average loss
avg_cost += sess.run(cost, feed_dict={x: batch_xs, y: batch_ys, keepratio:1.})/total_batch
# Display logs per epoch step
if epoch % display_step == 0:
print ("Epoch: %03d/%03d cost: %.9f" % (epoch, training_epochs, avg_cost))
train_acc = sess.run(accr, feed_dict={x: batch_xs, y: batch_ys, keepratio:1.})
print (" Training accuracy: %.3f" % (train_acc))
#test_acc = sess.run(accr, feed_dict={x: testimg, y: testlabel, keepratio:1.})
#print (" Test accuracy: %.3f" % (test_acc))
print ("OPTIMIZATION FINISHED")

相关文章推荐
- 吴恩达深度学习课程笔记之卷积神经网络基本操作详解
- 吴恩达卷积神经网络笔记(2)—深度卷积网络:实例研究
- 吴恩达深度学习笔记 course4 week2 深度卷积网络 实例探究
- 吴恩达深度学习入门学习笔记之神经网络和深度学习(第一周)
- 神经网络与深度学习_吴恩达 学习笔记(一)
- 吴恩达深度学习视频笔记1-2:《神经网络和深度学习》之《神经网络基础》
- 吴恩达Coursera深度学习课程 DeepLearning.ai 提炼笔记(4-1)-- 卷积神经网络基础
- 吴恩达深度学习笔记之卷积神经网络(实例探究)
- Coursea吴恩达《卷积神经网络》课程笔记(2)深度卷积网络
- 吴恩达神经网络和深度学习课程自学笔记(七)之超参数调试,Batch正则化和程序框架
- 深度学习(DL)与卷积神经网络(CNN)学习笔记随笔-02-基于Python的卷积运算
- 深度学习阅读笔记(四)之卷积网络CNN
- 吴恩达深度学习课程笔记 1.2什么是神经网络?
- 深度学习(DL)与卷积神经网络(CNN)学习笔记随笔-02-基于Python的卷积运算
- 吴恩达神经网络和深度学习课程自学笔记(二)之神经网络基础
- 吴恩达Coursera深度学习课程 DeepLearning.ai 提炼笔记(1-2)-- 神经网络基础
- 吴恩达深度学习笔记五:卷积神经网络 人脸识别和风格迁移部分
- 吴恩达Coursera深度学习课程 DeepLearning.ai 提炼笔记(4-2)-- 深度卷积模型
- 吴恩达Coursera深度学习课程 DeepLearning.ai 提炼笔记(1-4)-- 深层神经网络
- 吴恩达老师深度学习视频课笔记:多隐含层神经网络公式推导(二分类)