OPENCV特征点java提取与匹配与比较
2017-09-15 00:30
531 查看
opencv的features2d包中提供了surf,sift和orb等特征点算法,用于图像查找图像对象,搜索对象,分析对象,识别对象,合成全景等场合。
研究这些算法的原理和实现,是图像识别基础,OPENCV库使用2.413
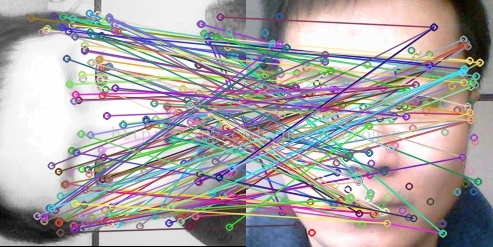
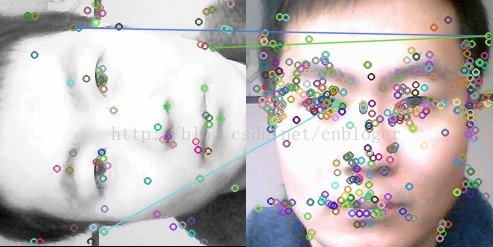
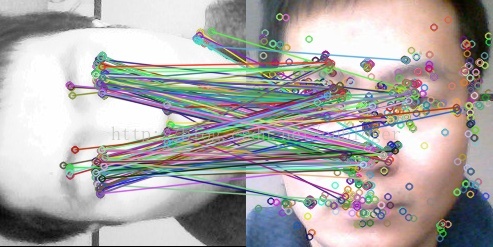
通过一些代码研究三种特征点算法,我有意把原始图像转为灰度并放置90与照处中人物比较,以研究三种算法对人脸识别的优点和局限。辅助使用了人脸查找获取待查找图像中人脸子矩阵。上代码。
import java.util.ArrayList;
import java.util.LinkedList;
import java.util.List;
import org.opencv.core.Core;
import org.opencv.core.Mat;
import org.opencv.core.MatOfDMatch;
import org.opencv.core.MatOfKeyPoint;
import org.opencv.core.MatOfRect;
import org.opencv.core.Size;
import org.opencv.features2d.DMatch;
import org.opencv.features2d.DescriptorExtractor;
import org.opencv.features2d.DescriptorMatcher;
import org.opencv.features2d.FeatureDetector;
import org.opencv.features2d.Features2d;
import org.opencv.highgui.Highgui;
import org.opencv.imgproc.Imgproc;
import org.opencv.objdetect.CascadeClassifier;
public class ExtractSIFT2 {
public static void main(String[] args) {
System.loadLibrary(Core.NATIVE_LIBRARY_NAME);
Mat src = Highgui.imread("E:/work/qqq/Y9.jpg");
Mat dst = Highgui.imread("E:/work/qqq/psb.jpg");
MatOfRect mr = getFace(dst);
Mat sub = dst.submat(mr.toArray()[0]);
Highgui.imwrite("E:/work/qqq/Y4.jpg", FeatureSurfBruteforce(src.t(), sub));
Highgui.imwrite("E:/work/qqq/Y5.jpg", FeatureSiftLannbased(src.t(), sub));
Highgui.imwrite("E:/work/qqq/Y6.jpg", FeatureOrbLannbased(src.t(), sub));
}
public static Mat FeatureSurfBruteforce(Mat src, Mat dst){
FeatureDetector fd = FeatureDetector.create(FeatureDetector.SURF);
DescriptorExtractor de = DescriptorExtractor.create(DescriptorExtractor.SURF);
//DescriptorMatcher Matcher = DescriptorMatcher.create(DescriptorMatcher.FLANNBASED);
DescriptorMatcher Matcher = DescriptorMatcher.create(DescriptorMatcher.BRUTEFORCE_L1);
MatOfKeyPoint mkp = new MatOfKeyPoint();
fd.detect(src, mkp);
Mat desc = new Mat();
de.compute(src, mkp, desc);
Features2d.drawKeypoints(src, mkp, src);
MatOfKeyPoint mkp2 = new MatOfKeyPoint();
fd.detect(dst, mkp2);
Mat desc2 = new Mat();
de.compute(dst, mkp2, desc2);
Features2d.drawKeypoints(dst, mkp2, dst);
// Matching features
MatOfDMatch Matches = new MatOfDMatch();
Matcher.match(desc, desc2, Matches);
double maxDist = Double.MIN_VALUE;
double minDist = Double.MAX_VALUE;
DMatch[] mats = Matches.toArray();
for (int i = 0; i < mats.length; i++) {
double dist = mats[i].distance;
if (dist < minDist) {
minDist = dist;
}
if (dist > maxDist) {
maxDist = dist;
}
}
System.out.println("Min Distance:" + minDist);
System.out.println("Max Distance:" + maxDist);
List<DMatch> goodMatch = new LinkedList<>();
for (int i = 0; i < mats.length; i++) {
double dist = mats[i].distance;
if (dist < 3 * minDist && dist < 0.2f) {
goodMatch.add(mats[i]);
}
}
Matches.fromList(goodMatch);
// Show result
Mat OutImage = new Mat();
Features2d.drawMatches(src, mkp, dst, mkp2, Matches, OutImage);
return OutImage;
}
public static Mat FeatureSiftLannbased(Mat src, Mat dst){
FeatureDetector fd = FeatureDetector.create(FeatureDetector.SIFT);
DescriptorExtractor de = DescriptorExtractor.create(DescriptorExtractor.SIFT);
DescriptorMatcher Matcher = DescriptorMatcher.create(DescriptorMatcher.FLANNBASED);
MatOfKeyPoint mkp = new MatOfKeyPoint();
fd.detect(src, mkp);
Mat desc = new Mat();
de.compute(src, mkp, desc);
Features2d.drawKeypoints(src, mkp, src);
MatOfKeyPoint mkp2 = new MatOfKeyPoint();
fd.detect(dst, mkp2);
Mat desc2 = new Mat();
de.compute(dst, mkp2, desc2);
Features2d.drawKeypoints(dst, mkp2, dst);
// Matching features
MatOfDMatch Matches = new MatOfDMatch();
Matcher.match(desc, desc2, Matches);
List<DMatch> l = Matches.toList();
List<DMatch> goodMatch = new ArrayList<DMatch>();
for (int i = 0; i < l.size(); i++) {
DMatch dmatch = l.get(i);
if (Math.abs(dmatch.queryIdx - dmatch.trainIdx) < 10f) {
goodMatch.add(dmatch);
}
}
Matches.fromList(goodMatch);
// Show result
Mat OutImage = new Mat();
Features2d.drawMatches(src, mkp, dst, mkp2, Matches, OutImage);
return OutImage;
}
public static Mat FeatureOrbLannbased(Mat src, Mat dst){
FeatureDetector fd = FeatureDetector.create(FeatureDetector.ORB);
DescriptorExtractor de = DescriptorExtractor.create(DescriptorExtractor.ORB);
DescriptorMatcher Matcher = DescriptorMatcher.create(DescriptorMatcher.BRUTEFORCE_L1);
MatOfKeyPoint mkp = new MatOfKeyPoint();
fd.detect(src, mkp);
Mat desc = new Mat();
de.compute(src, mkp, desc);
Features2d.drawKeypoints(src, mkp, src);
MatOfKeyPoint mkp2 = new MatOfKeyPoint();
fd.detect(dst, mkp2);
Mat desc2 = new Mat();
de.compute(dst, mkp2, desc2);
Features2d.drawKeypoints(dst, mkp2, dst);
// Matching features
MatOfDMatch Matches = new MatOfDMatch();
Matcher.match(desc, desc2, Matches);
double maxDist = Double.MIN_VALUE;
double minDist = Double.MAX_VALUE;
DMatch[] mats = Matches.toArray();
for (int i = 0; i < mats.length; i++) {
double dist = mats[i].distance;
if (dist < minDist) {
minDist = dist;
}
if (dist > maxDist) {
maxDist = dist;
}
}
System.out.println("Min Distance:" + minDist);
System.out.println("Max Distance:" + maxDist);
List<DMatch> goodMatch = new LinkedList<>();
for (int i = 0; i < mats.length; i++) {
double dist = mats[i].distance;
if (dist < 3 * minDist && dist < 0.2f) {
goodMatch.add(mats[i]);
}
}
Matches.fromList(goodMatch);
// Show result
Mat OutImage = new Mat();
Features2d.drawMatches(src, mkp, dst, mkp2, Matches, OutImage);
//Highgui.imwrite("E:/work/qqq/Y4.jpg", OutImage);
return OutImage;
}
public static MatOfRect getFace(Mat src) {
Mat result = src.clone();
if (src.cols() > 1000 || src.rows() > 1000) {
Imgproc.resize(src, result, new Size(src.cols() / 3, src.rows() / 3));
}
CascadeClassifier faceDetector = new CascadeClassifier("./resource/haarcascade_frontalface_alt2.xml");
MatOfRect objDetections = new MatOfRect();
faceDetector.detectMultiScale(result, objDetections);
return objDetections;
}
}
人脸灰度图,待处理的图片和处理后三种方法对比,做了一些简单的取优。结果来看,orb算法似乎优于其他两种。


参考: http://blog.csdn.net/liufanghuangdi/article/details/52957094?locationNum=2&fps=1 http://blog.csdn.net/shuzhe66/article/details/40824883
研究这些算法的原理和实现,是图像识别基础,OPENCV库使用2.413
通过一些代码研究三种特征点算法,我有意把原始图像转为灰度并放置90与照处中人物比较,以研究三种算法对人脸识别的优点和局限。辅助使用了人脸查找获取待查找图像中人脸子矩阵。上代码。
import java.util.ArrayList;
import java.util.LinkedList;
import java.util.List;
import org.opencv.core.Core;
import org.opencv.core.Mat;
import org.opencv.core.MatOfDMatch;
import org.opencv.core.MatOfKeyPoint;
import org.opencv.core.MatOfRect;
import org.opencv.core.Size;
import org.opencv.features2d.DMatch;
import org.opencv.features2d.DescriptorExtractor;
import org.opencv.features2d.DescriptorMatcher;
import org.opencv.features2d.FeatureDetector;
import org.opencv.features2d.Features2d;
import org.opencv.highgui.Highgui;
import org.opencv.imgproc.Imgproc;
import org.opencv.objdetect.CascadeClassifier;
public class ExtractSIFT2 {
public static void main(String[] args) {
System.loadLibrary(Core.NATIVE_LIBRARY_NAME);
Mat src = Highgui.imread("E:/work/qqq/Y9.jpg");
Mat dst = Highgui.imread("E:/work/qqq/psb.jpg");
MatOfRect mr = getFace(dst);
Mat sub = dst.submat(mr.toArray()[0]);
Highgui.imwrite("E:/work/qqq/Y4.jpg", FeatureSurfBruteforce(src.t(), sub));
Highgui.imwrite("E:/work/qqq/Y5.jpg", FeatureSiftLannbased(src.t(), sub));
Highgui.imwrite("E:/work/qqq/Y6.jpg", FeatureOrbLannbased(src.t(), sub));
}
public static Mat FeatureSurfBruteforce(Mat src, Mat dst){
FeatureDetector fd = FeatureDetector.create(FeatureDetector.SURF);
DescriptorExtractor de = DescriptorExtractor.create(DescriptorExtractor.SURF);
//DescriptorMatcher Matcher = DescriptorMatcher.create(DescriptorMatcher.FLANNBASED);
DescriptorMatcher Matcher = DescriptorMatcher.create(DescriptorMatcher.BRUTEFORCE_L1);
MatOfKeyPoint mkp = new MatOfKeyPoint();
fd.detect(src, mkp);
Mat desc = new Mat();
de.compute(src, mkp, desc);
Features2d.drawKeypoints(src, mkp, src);
MatOfKeyPoint mkp2 = new MatOfKeyPoint();
fd.detect(dst, mkp2);
Mat desc2 = new Mat();
de.compute(dst, mkp2, desc2);
Features2d.drawKeypoints(dst, mkp2, dst);
// Matching features
MatOfDMatch Matches = new MatOfDMatch();
Matcher.match(desc, desc2, Matches);
double maxDist = Double.MIN_VALUE;
double minDist = Double.MAX_VALUE;
DMatch[] mats = Matches.toArray();
for (int i = 0; i < mats.length; i++) {
double dist = mats[i].distance;
if (dist < minDist) {
minDist = dist;
}
if (dist > maxDist) {
maxDist = dist;
}
}
System.out.println("Min Distance:" + minDist);
System.out.println("Max Distance:" + maxDist);
List<DMatch> goodMatch = new LinkedList<>();
for (int i = 0; i < mats.length; i++) {
double dist = mats[i].distance;
if (dist < 3 * minDist && dist < 0.2f) {
goodMatch.add(mats[i]);
}
}
Matches.fromList(goodMatch);
// Show result
Mat OutImage = new Mat();
Features2d.drawMatches(src, mkp, dst, mkp2, Matches, OutImage);
return OutImage;
}
public static Mat FeatureSiftLannbased(Mat src, Mat dst){
FeatureDetector fd = FeatureDetector.create(FeatureDetector.SIFT);
DescriptorExtractor de = DescriptorExtractor.create(DescriptorExtractor.SIFT);
DescriptorMatcher Matcher = DescriptorMatcher.create(DescriptorMatcher.FLANNBASED);
MatOfKeyPoint mkp = new MatOfKeyPoint();
fd.detect(src, mkp);
Mat desc = new Mat();
de.compute(src, mkp, desc);
Features2d.drawKeypoints(src, mkp, src);
MatOfKeyPoint mkp2 = new MatOfKeyPoint();
fd.detect(dst, mkp2);
Mat desc2 = new Mat();
de.compute(dst, mkp2, desc2);
Features2d.drawKeypoints(dst, mkp2, dst);
// Matching features
MatOfDMatch Matches = new MatOfDMatch();
Matcher.match(desc, desc2, Matches);
List<DMatch> l = Matches.toList();
List<DMatch> goodMatch = new ArrayList<DMatch>();
for (int i = 0; i < l.size(); i++) {
DMatch dmatch = l.get(i);
if (Math.abs(dmatch.queryIdx - dmatch.trainIdx) < 10f) {
goodMatch.add(dmatch);
}
}
Matches.fromList(goodMatch);
// Show result
Mat OutImage = new Mat();
Features2d.drawMatches(src, mkp, dst, mkp2, Matches, OutImage);
return OutImage;
}
public static Mat FeatureOrbLannbased(Mat src, Mat dst){
FeatureDetector fd = FeatureDetector.create(FeatureDetector.ORB);
DescriptorExtractor de = DescriptorExtractor.create(DescriptorExtractor.ORB);
DescriptorMatcher Matcher = DescriptorMatcher.create(DescriptorMatcher.BRUTEFORCE_L1);
MatOfKeyPoint mkp = new MatOfKeyPoint();
fd.detect(src, mkp);
Mat desc = new Mat();
de.compute(src, mkp, desc);
Features2d.drawKeypoints(src, mkp, src);
MatOfKeyPoint mkp2 = new MatOfKeyPoint();
fd.detect(dst, mkp2);
Mat desc2 = new Mat();
de.compute(dst, mkp2, desc2);
Features2d.drawKeypoints(dst, mkp2, dst);
// Matching features
MatOfDMatch Matches = new MatOfDMatch();
Matcher.match(desc, desc2, Matches);
double maxDist = Double.MIN_VALUE;
double minDist = Double.MAX_VALUE;
DMatch[] mats = Matches.toArray();
for (int i = 0; i < mats.length; i++) {
double dist = mats[i].distance;
if (dist < minDist) {
minDist = dist;
}
if (dist > maxDist) {
maxDist = dist;
}
}
System.out.println("Min Distance:" + minDist);
System.out.println("Max Distance:" + maxDist);
List<DMatch> goodMatch = new LinkedList<>();
for (int i = 0; i < mats.length; i++) {
double dist = mats[i].distance;
if (dist < 3 * minDist && dist < 0.2f) {
goodMatch.add(mats[i]);
}
}
Matches.fromList(goodMatch);
// Show result
Mat OutImage = new Mat();
Features2d.drawMatches(src, mkp, dst, mkp2, Matches, OutImage);
//Highgui.imwrite("E:/work/qqq/Y4.jpg", OutImage);
return OutImage;
}
public static MatOfRect getFace(Mat src) {
Mat result = src.clone();
if (src.cols() > 1000 || src.rows() > 1000) {
Imgproc.resize(src, result, new Size(src.cols() / 3, src.rows() / 3));
}
CascadeClassifier faceDetector = new CascadeClassifier("./resource/haarcascade_frontalface_alt2.xml");
MatOfRect objDetections = new MatOfRect();
faceDetector.detectMultiScale(result, objDetections);
return objDetections;
}
}
人脸灰度图,待处理的图片和处理后三种方法对比,做了一些简单的取优。结果来看,orb算法似乎优于其他两种。
参考: http://blog.csdn.net/liufanghuangdi/article/details/52957094?locationNum=2&fps=1 http://blog.csdn.net/shuzhe66/article/details/40824883

相关文章推荐
- opencv3_java akaze的特征提取与图像匹配 akaze
- [置顶] 基于opencv-3.4.0的图像特征点提取及图像匹配(Java 版)
- 使用OpenCV3进行SURF特征提取和暴力匹配代码详解
- opencv库图像特征提取与匹配--参考SLAM十四讲7.2
- OpenCV中特征点提取和匹配的通用方法
- opencv上gpu版surf特征点与orb特征点提取及匹配实例
- Opencv 各种特征点提取和匹配
- opencv 特征点提取、匹配(一)
- Matlab/OpenCV自己实现Harris特征点提取和匹配
- OpenCV中特征点提取和匹配的通用方法
- 【OpenCV】图像特征的提取以及相似性比较方法
- OpenCV实践之路——Qt中用opencv提取和匹配SIFT特征点
- OpenCV中提取SIFT特征点、图像匹配、图像配准
- OpenCV中特征点提取和匹配的通用方法
- Opencv运动物体常用的特征提取与匹配方法
- OpenCV中特征点提取和匹配的通用方法
- 利用opencv提取Hu不变量特征 形状匹配
- OpenCV中特征点提取和匹配的通用方法
- opencv之SURF特征点提取及匹配
- 利用opencv提取Hu不变量特征 形状匹配 机器学习识别手写数字 傅里叶变换