图像特征匹配总结
2017-05-22 20:39
429 查看
一. Brute-Force的匹配基础
蛮力匹配器:首先在第一幅图像中选取一个关键点然后依次与第二幅图像的每个关键点进行(描述符)距离测试,最
后返回距离最近的关键点。函数原型BFMatcher::BFMatcher(int normType=NORM_L2, bool crossCheck=false),如
下所示:
1. normType:它是用来指定要使用的距离测试类型。默认值为cv2.Norm_L2。这很适合SIFT和SURF等
(c2.NORM_L1也可)。对于使用二进制描述符的ORB、BRIEF和BRISK算法等,要使用cv2.NORM_HAMMING,
这样就会返回两个测试对象之间的汉明距离。如果ORB算法的参数设置为WTA_K==3或4,normType就应该设置成
cv2.NORM_HAMMING2。
2. crossCheck:默认值为False。如果设置为True,匹配条件就会更加严格,只有到A中的第

个特征点与B中的第

个
特征点距离最近,并且B中的第
个特征点到A中的第
个特征点也是最近时才会返回最佳匹配

,即这两个特征点要
互相匹配才行。
BFMatcher对象有两个方法BFMatcher.match()和BFMatcher.knnMatch()。第一个方法会返回最佳匹配。第二个方
法为每个关键点返回

个最佳匹配,其中
是由用户设定的。使用cv2.drawMatches()来绘制匹配的点,它会将两幅图
像先水平排列,然后在最佳匹配的点之间绘制直线。如果前面使用的是BFMatcher.knnMatch(),现在可以使用函数
cv2.drawMatchsKnn为每个关键点和它的
个最佳匹配点绘制匹配线。如果要选择性绘制就要给函数传入一个掩模。
二. 对ORB描述符进行蛮力匹配
使用ORB描述符来进行特征匹配,在目标图像中寻找查询图像的位置,如下所示:

matches=bf.match(des1,des2)返回值是一个DMatch对象列表。DMatch对象具有属性:DMatch.distance表示描述符
之间的距离,越小越好。DMatch.trainIdx表示目标图像中描述符的索引。DMatch.queryIdx表示查询图像中描述符的
索引。DMatch.imgIdx表示目标图像的索引。
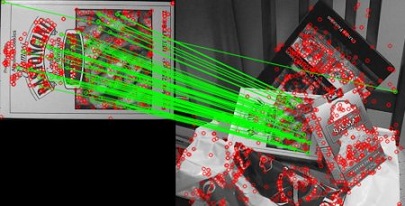
三. 对SIFT描述符进行蛮力匹配和比值测试
如果k等于2,就会为每个关键点绘制两条最佳匹配直线。比值测试的意思是首先获取与A距离最近的点B(最近)和
C(次近),只有当B/C小于阈值(0.75)才被认为是匹配。因为假设匹配是一一对应,真正匹配的理想距离为0。

四. FLANN匹配器
快速最近邻搜索包(Fast Library for Approximate NearestNeighbors,FLANN)是一个对大数据集和高维特征进行最
近邻搜索的算法的集合,在面对大数据集时它的效果要好于BFMatcher。使用FLANN匹配需要传入两个字典参数,第
一个参数是IndexParams,对于SIFT和SURF,可以传入参数
index_params=dict(algorithm=FLANN_INDEX_KDTREE, trees=5)。对于ORB,可以传入参数
index_params=dict(algorithm=FLANN_INDEX_LSH, table_number=6, key_size=12, multi_probe_level=1)。第二个
参数是SearchParams,可以传入参数search_params=dict(checks=100),它来指定递归遍历的次数,值越高结果越
准确,但是消耗的时间也越多。
函数原型cv2.drawMatchesKnn(img1, keypoints1, img2, keypoints2, matches1to2[, outImg[, matchColor[,
singlePointColor[, matchesMask[, flags]]]]]) → outImg,如下所示:
1. matches1to2:Matches from the first image to the second one, which means that keypoints1[i] has a
corresponding point in keypoints2[matches[i]].
2. matchesMask:Mask determining which matches are drawn. If the mask is empty, all matches are drawn.
3. flags:Flags setting drawing features. Possible flags bit values are defined by DrawMatchesFlags.
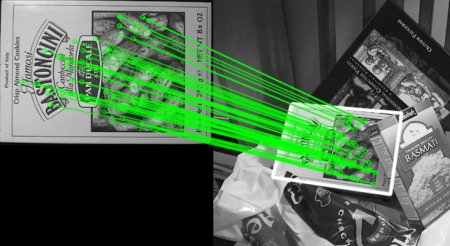
五. 使用特征匹配和单应性查找对象
联合使用特征提取和calib3d模块中的findHomography在复杂图像中查找已知对象。基本思路是首先将这两幅图像中
的特征点集传给该函数,它就会找到这个对象的透视图变换。然后使用函数cv2.perspectiveTransform()找到这个对
象。至少需要4个正确的点才能找到这种变换。为了解决匹配过程中的错误,使用RANSAC和LEAST_MEDIAN算法来
解决这个问题。好的匹配提供的正确的估计被称为inliers,剩下的被称为outliers。cv2.findHomography()返回一个掩
模,这个掩模确定了inlier和outlier。
参考文献:
[1] Feature Matching:http://docs.opencv.org/3.0-beta/doc/py_tutorials/py_feature2d/py_matcher/py_matcher.html#matcher
蛮力匹配器:首先在第一幅图像中选取一个关键点然后依次与第二幅图像的每个关键点进行(描述符)距离测试,最
后返回距离最近的关键点。函数原型BFMatcher::BFMatcher(int normType=NORM_L2, bool crossCheck=false),如
下所示:
1. normType:它是用来指定要使用的距离测试类型。默认值为cv2.Norm_L2。这很适合SIFT和SURF等
(c2.NORM_L1也可)。对于使用二进制描述符的ORB、BRIEF和BRISK算法等,要使用cv2.NORM_HAMMING,
这样就会返回两个测试对象之间的汉明距离。如果ORB算法的参数设置为WTA_K==3或4,normType就应该设置成
cv2.NORM_HAMMING2。
2. crossCheck:默认值为False。如果设置为True,匹配条件就会更加严格,只有到A中的第
个特征点与B中的第
个
特征点距离最近,并且B中的第
个特征点到A中的第
个特征点也是最近时才会返回最佳匹配
,即这两个特征点要
互相匹配才行。
BFMatcher对象有两个方法BFMatcher.match()和BFMatcher.knnMatch()。第一个方法会返回最佳匹配。第二个方
法为每个关键点返回
个最佳匹配,其中
是由用户设定的。使用cv2.drawMatches()来绘制匹配的点,它会将两幅图
像先水平排列,然后在最佳匹配的点之间绘制直线。如果前面使用的是BFMatcher.knnMatch(),现在可以使用函数
cv2.drawMatchsKnn为每个关键点和它的
个最佳匹配点绘制匹配线。如果要选择性绘制就要给函数传入一个掩模。
二. 对ORB描述符进行蛮力匹配
使用ORB描述符来进行特征匹配,在目标图像中寻找查询图像的位置,如下所示:
import cv2
from matplotlib import pyplot as plt
img1 = cv2.imread('box.png',0) # queryImage
img2 = cv2.imread('box_in_scene.png',0) # trainImage
# Initiate SIFT detector
orb = cv2.ORB()
# find the keypoints and descriptors with SIFT
kp1, des1 = orb.detectAndCompute(img1,None)
kp2, des2 = orb.detectAndCompute(img2,None)
# create BFMatcher object
bf = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)
# Match descriptors.
matches = bf.match(des1,des2)
# Sort them in the order of their distance.
matches = sorted(matches,key=lambda x:x.distance)
# Draw first 10 matches.
img3 = cv2.drawMatches(img1,kp1,img2,kp2,matches[:10],flags=2)
plt.imshow(img3)
plt.show()结果输出,如下所示:matches=bf.match(des1,des2)返回值是一个DMatch对象列表。DMatch对象具有属性:DMatch.distance表示描述符
之间的距离,越小越好。DMatch.trainIdx表示目标图像中描述符的索引。DMatch.queryIdx表示查询图像中描述符的
索引。DMatch.imgIdx表示目标图像的索引。
三. 对SIFT描述符进行蛮力匹配和比值测试
如果k等于2,就会为每个关键点绘制两条最佳匹配直线。比值测试的意思是首先获取与A距离最近的点B(最近)和
C(次近),只有当B/C小于阈值(0.75)才被认为是匹配。因为假设匹配是一一对应,真正匹配的理想距离为0。
import cv2
from matplotlib import pyplot as plt
img1 = cv2.imread('box.png',0) # queryImage
img2 = cv2.imread('box_in_scene.png',0) # trainImage
# Initiate SIFT detector
sift = cv2.SIFT()
# find the keypoints and descriptors with SIFT
kp1, des1 = sift.detectAndCompute(img1,None)
kp2, des2 = sift.detectAndCompute(img2,None)
# BFMatcher with default params
bf = cv2.BFMatcher()
matches = bf.knnMatch(des1,des2,k=2)
# Apply ratio test
good = []
for m,n in matches:
if m.distance < 0.75*n.distance:
good.append([m])
# cv2.drawMatchesKnn expects list of lists as matches
img3 = cv2.drawMatchesKnn(img1,kp1,img2,kp2,good,flags=2)
plt.imshow(img3)
plt.show()结果输出,如下所示:四. FLANN匹配器
快速最近邻搜索包(Fast Library for Approximate NearestNeighbors,FLANN)是一个对大数据集和高维特征进行最
近邻搜索的算法的集合,在面对大数据集时它的效果要好于BFMatcher。使用FLANN匹配需要传入两个字典参数,第
一个参数是IndexParams,对于SIFT和SURF,可以传入参数
index_params=dict(algorithm=FLANN_INDEX_KDTREE, trees=5)。对于ORB,可以传入参数
index_params=dict(algorithm=FLANN_INDEX_LSH, table_number=6, key_size=12, multi_probe_level=1)。第二个
参数是SearchParams,可以传入参数search_params=dict(checks=100),它来指定递归遍历的次数,值越高结果越
准确,但是消耗的时间也越多。
import cv2
from matplotlib import pyplot as plt
img1 = cv2.imread('box.png',0) # queryImage
img2 = cv2.imread('box_in_scene.png',0) # trainImage
# Initiate SIFT detector
sift = cv2.SIFT()
# find the keypoints and descriptors with SIFT
kp1, des1 = sift.detectAndCompute(img1,None)
kp2, des2 = sift.detectAndCompute(img2,None)
# FLANN parameters
FLANN_INDEX_KDTREE=0
index_params = dict(algorithm=FLANN_INDEX_KDTREE, trees=5)
search_params = dict(checks=50)
flann = cv2.FlannBasedMatcher(index_params,search_params)
matches = flann.knnMatch(des1,des2,k=2)
# Need to draw only good matches, so create a mask
matchesMask = [[0,0] for i in xrange(len(matches))]
# ratio test as per Lowe's paper
for i,(m,n) in enumerate(matches):
if m.distance < 0.7*n.distance:
matchesMask[i]=[1,0]
draw_params = dict(matchColor=(0,255,0),
singlePointColor=(255,0,0),
matchesMask=matchesMask,
flags=0)
img3 = cv2.drawMatchesKnn(img1,kp1,img2,kp2,matches,None,**draw_params)
plt.imshow(img3)
plt.show()结果输出,如下所示:函数原型cv2.drawMatchesKnn(img1, keypoints1, img2, keypoints2, matches1to2[, outImg[, matchColor[,
singlePointColor[, matchesMask[, flags]]]]]) → outImg,如下所示:
1. matches1to2:Matches from the first image to the second one, which means that keypoints1[i] has a
corresponding point in keypoints2[matches[i]].
2. matchesMask:Mask determining which matches are drawn. If the mask is empty, all matches are drawn.
3. flags:Flags setting drawing features. Possible flags bit values are defined by DrawMatchesFlags.
五. 使用特征匹配和单应性查找对象
联合使用特征提取和calib3d模块中的findHomography在复杂图像中查找已知对象。基本思路是首先将这两幅图像中
的特征点集传给该函数,它就会找到这个对象的透视图变换。然后使用函数cv2.perspectiveTransform()找到这个对
象。至少需要4个正确的点才能找到这种变换。为了解决匹配过程中的错误,使用RANSAC和LEAST_MEDIAN算法来
解决这个问题。好的匹配提供的正确的估计被称为inliers,剩下的被称为outliers。cv2.findHomography()返回一个掩
模,这个掩模确定了inlier和outlier。
import numpy as np
import cv2
from matplotlib import pyplot as plt
MIN_MATCH_COUNT = 10
img1 = cv2.imread('box.png',0) # queryImage
img2 = cv2.imread('box_in_scene.png',0) # trainImage
# Initiate SIFT detector
sift = cv2.SIFT()
# find the keypoints and descriptors with SIFT
kp1, des1 = sift.detectAndCompute(img1,None)
kp2, des2 = sift.detectAndCompute(img2,None)
FLANN_INDEX_KDTREE = 0
index_params = dict(algorithm = FLANN_INDEX_KDTREE, trees = 5)
search_params = dict(checks = 50)
flann = cv2.FlannBasedMatcher(index_params, search_params)
matches = flann.knnMatch(des1,des2,k=2)
# store all the good matches as per Lowe's ratio test.
good = []
for m,n in matches:
if m.distance < 0.7*n.distance:
good.append(m)
if len(good)>MIN_MATCH_COUNT:
# 获取关键点的坐标
src_pts = np.float32([ kp1[m.queryIdx].pt for m in good ]).reshape(-1,1,2)
dst_pts = np.float32([ kp2[m.trainIdx].pt for m in good ]).reshape(-1,1,2)
M, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, 5.0)
matchesMask = mask.ravel().tolist()
h,w = img1.shape
# 使用得到的变换矩阵对原图像的四个角进行变换,获得在目标图像上对应的坐标
pts = np.float32([ [0,0],[0,h-1],[w-1,h-1],[w-1,0] ]).reshape(-1,1,2)
dst = cv2.perspectiveTransform(pts,M)
cv2.polylines(img2,[np.int32(dst)],True,255,10, cv2.LINE_AA)
else:
print "Not enough matches are found - %d/%d" % (len(good),MIN_MATCH_COUNT)
matchesMask = None
draw_params = dict(matchColor=(0,255,0),
singlePointColor=None,
matchesMask=matchesMask,
flags=2)
img3 = cv2.drawMatches(img1,kp1,img2,kp2,good,None,**draw_params)
plt.imshow(img3, 'gray')
plt.show()结果输出,如下所示:参考文献:
[1] Feature Matching:http://docs.opencv.org/3.0-beta/doc/py_tutorials/py_feature2d/py_matcher/py_matcher.html#matcher

相关文章推荐
- 图像特征特点及其常用的特征提取与匹配方法
- 图像特征特点及其常用的特征提取与匹配方法
- 图像特征特点及其常用的特征提取与匹配方法
- 图像特征特点及其常用的特征提取与匹配方法
- ransac算法–基于几何关系的图像特征匹配点对提纯
- 图像特征特点及其常用的特征提取与匹配方法
- 图像特征特点及其常用的特征提取与匹配方法
- 图像特征特点及其常用的特征提取与匹配方法
- 图像特征特点及其常用的特征提取与匹配方法
- 图像特征特点及其常用的特征提取与匹配方法
- 图像特征提取总结
- 经典算法研究系列:九、图像特征提取与匹配之SIFT算法
- 经典算法研究系列:九、图像特征提取与匹配之SIFT算法
- 图像特征特点及其常用的特征提取与匹配方法
- 基于尺度不变特征变换的图像匹配研究
- 图像特征特点及常用的特征提取与匹配方法
- 经典算法研究系列:九、图像特征提取与匹配之SIFT算法
- sift图像特征提取与匹配算法代码
- 图像特征特点及其常用的特征提取与匹配方法
- OpenCV-基于特征点的图像匹配