EventBus 3.0使用详解
2016-09-13 15:32
537 查看
EventBus介绍:
EventBus出自greenrobot,和之前大名鼎鼎的GreenDao出自同一家。之前一直使用的是2.4版本,今天我们将学习分析最新的Event 3.0,EventBus 3.0 最新的特性就是加入了注解,通过注解的方式 告知订阅函数运行在哪个线程中。github地址:https://github.com/greenrobot/EventBus
官方文档:http://greenrobot.org/eventbus/documentation
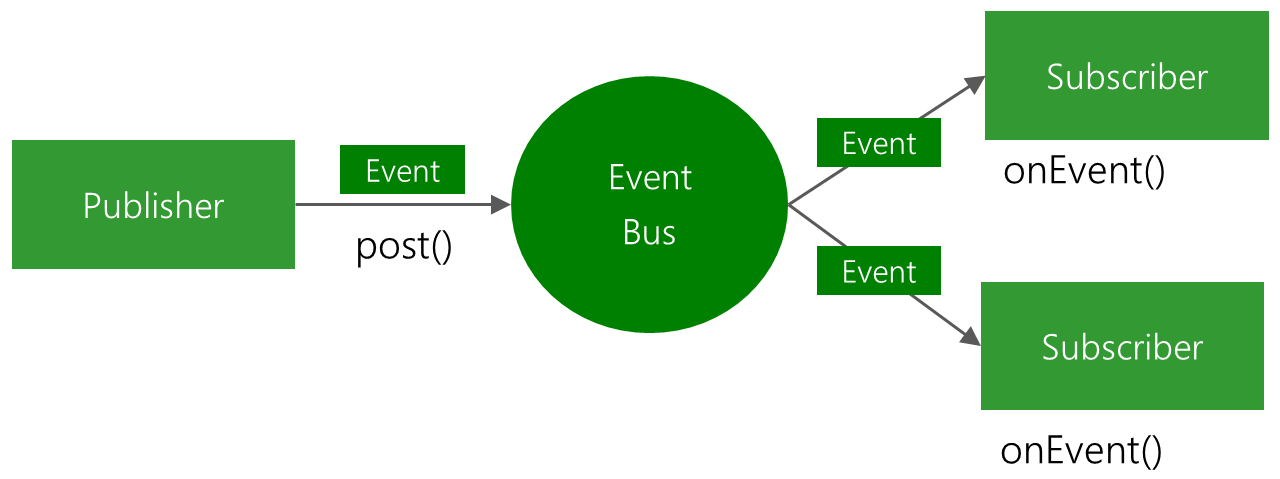
EventBus主要角色:
Event 传递的事件对象Subscriber 事件的订阅者
Publisher 事件的发布者
ThreadMode 定义函数在何种线程中执行
官网给出的各种角色的协作图
EventBus配置:
EventBus框架也是采用建造者模式设计的,可以通过EventBusBuilder来设置一些配置信息,例如设置debug模式下要抛出异常EventBus eventBus=EventBus.builder().throwSubscriberException(BuildConfig.DEBUG).build();
EventBus示例:
之前做图片社交App的时候,需要处理一个点赞数据的同步,比如在作品的详情页点赞 需要同时更新列表页该作品的点赞数量,这里还是以此为例。1.)build.gradle添加引用
compile 'org.greenrobot:eventbus:3.0.0'
2.)定义一个事件类型
public class DataSynEvent {
private int count;
public int getCount() {
return count;
}
public void setCount(int count) {
this.count = count;
}
}3.)订阅/解除订阅
订阅
EventBus.getDefault().register(this);//订阅
解除订阅
EventBus.getDefault().unregister(this);//解除订阅
4.)发布事件
EventBus.getDefault().post(new DataSynEvent());
5.)订阅事件处理
@Subscribe(threadMode = ThreadMode.MAIN) //在ui线程执行
public void onDataSynEvent(DataSynEvent event) {
Log.e(TAG, "event---->" + event.getCount());
}ThreadMode总共四个:
PostThread:如果使用事件处理函数指定了线程模型为PostThread,那么该事件在哪个线程发布出来的,事件处理函数就会在这个线程中运行,也就是说发布事件和接收事件在同一个线程。在线程模型为PostThread的事件处理函数中尽量避免执行耗时操作,因为它会阻塞事件的传递,甚至有可能会引起ANR。
MainThread:如果使用事件处理函数指定了线程模型为MainThread,那么不论事件是在哪个线程中发布出来的,该事件处理函数都会在UI线程中执行。该方法可以用来更新UI,但是不能处理耗时操作。
BackgroundThread:如果使用事件处理函数指定了线程模型为BackgroundThread,那么如果事件是在UI线程中发布出来的,那么该事件处理函数就会在新的线程中运行,如果事件本来就是子线程中发布出来的,那么该事件处理函数直接在发布事件的线程中执行。在此事件处理函数中禁止进行UI更新操作。
Async:如果使用事件处理函数指定了线程模型为Async,那么无论事件在哪个线程发布,该事件处理函数都会在新建的子线程中执行。同样,此事件处理函数中禁止进行UI更新操作。
6.)订阅事件的优先级
事件的优先级类似广播的优先级,优先级越高优先获得消息
@Subscribe(threadMode = ThreadMode.MAIN,priority = 100) //在ui线程执行 优先级100
public void onDataSynEvent(DataSynEvent event) {
Log.e(TAG, "event---->" + event.getCount());
}7.)终止事件往下传递
发送有序广播可以终止广播的继续往下传递,EventBus也实现了此功能
EventBus.getDefault().cancelEventDelivery(event) ;//优先级高的订阅者可以终止事件往下传递
8.)处理代码混淆
-keepattributes *Annotation*
-keepclassmembers class ** {
@org.greenrobot.eventbus.Subscribe <methods>;
}
-keep enum org.greenrobot.eventbus.ThreadMode { *; }
# Only required if you use AsyncExecutor
-keepclassmembers class * extends org.greenrobot.eventbus.util.ThrowableFailureEvent {
<init>(java.lang.Throwable);
}EventBus黏性事件
EventBus除了普通事件也支持粘性事件,这个有点类似广播分类中的粘性广播。本身粘性广播用的就比较少,为了方便理解成订阅在发布事件之后,但同样可以收到事件。订阅/解除订阅和普通事件一样,但是处理订阅函数有所不同,需要注解中添加sticky = true@Subscribe(threadMode = ThreadMode.MAIN,sticky = true) //在ui线程执行
public void onDataSynEvent(DataSynEvent event) {
Log.e(TAG, "event---->" + event.getCount());
}发送粘性事件
EventBus.getDefault().postSticky(new DataSynEvent());
对于粘性广播我们都比较清楚属于常驻广播,对于EventBus粘性事件也类似,我们如果不再需要该粘性事件我们可以移除
EventBus.getDefault().removeStickyEvent(new DataSynEvent());
或者调用移除所有粘性事件
EventBus.getDefault().removeAllStickyEvents();
EventBus processor使用:
EventBus提供了一个EventBusAnnotationProcessor注解处理器来在编译期通过读取@Subscribe()注解并解析,处理其中所包含的信息,然后生成java类来保存所有订阅者关于订阅的信息,这样就比在运行时使用反射来获得这些订阅者的
信息速度要快.
1.)具体使用:在build.gradle中添加如下配置
buildscript {
dependencies {
classpath 'com.neenbedankt.gradle.plugins:android-apt:1.8'
}
}
apply plugin: 'com.neenbedankt.android-apt'
dependencies {
compile 'org.greenrobot:eventbus:3.0.0'
apt 'org.greenrobot:eventbus-annotation-processor:3.0.1'
}
apt {
arguments {
eventBusIndex "com.whoislcj.eventbus.MyEventBusIndex"
}
}2.)使用索引
此时编译一次,自动生成生成索引类。在\
build\generated\source\apt\PakageName\下看到通过注解分析生成的索引类,这样我们便可以在初始化EventBus时应用我们生成的索引了。
自动生成的代码
/** This class is generated by EventBus, do not edit. */
public class MyEventBusIndex implements SubscriberInfoIndex {
private static final Map<Class<?>, SubscriberInfo> SUBSCRIBER_INDEX;
static {
SUBSCRIBER_INDEX = new HashMap<Class<?>, SubscriberInfo>();
putIndex(new SimpleSubscriberInfo(com.whoislcj.testhttp.MainActivity.class, true, new SubscriberMethodInfo[] {
new SubscriberMethodInfo("onDataSynEvent", com.whoislcj.testhttp.eventBus.DataSynEvent.class,
ThreadMode.MAIN, 100, false),
new SubscriberMethodInfo("onDataSynEvent1", com.whoislcj.testhttp.eventBus.TestEvent.class, ThreadMode.MAIN,
0, true),
}));
}
private static void putIndex(SubscriberInfo info) {
SUBSCRIBER_INDEX.put(info.getSubscriberClass(), info);
}
@Override
public SubscriberInfo getSubscriberInfo(Class<?> subscriberClass) {
SubscriberInfo info = SUBSCRIBER_INDEX.get(subscriberClass);
if (info != null) {
return info;
} else {
return null;
}
}
}添加索引到EventBus默认的单例中
EventBus.builder().addIndex(new MyEventBusIndex()).installDefaultEventBus();
3.)对比添加前后注册效率对比
分别EventBus.getDefault().register(this);
添加之前:前后用了9毫秒

添加之后:前后用了2毫秒

EventBus优缺点:
优点:简化组件之间的通信方式,实现解耦让业务代码更加简洁,可以动态设置事件处理线程以及优先级缺点:目前发现唯一的缺点就是类似之前策略模式一样的诟病,每个事件都必须自定义一个事件类,造成事件类太多,无形中加大了维护成本
EventBus 3.0 与2.x的区别
1.)代码更加简洁EventBus 2.x 必须定义以onEvent开头的几个方法,代码中语境比较突兀,且有可能会导致拼写错误,例如数据同步事件
public void onEvent(DataSynEvent event) {
//事件在哪个线程发布出来的,onEvent就会在这个线程中运行, 同 @Subscribe(threadMode = ThreadMode.POSTING)
}
public void onEventMainThread(DataSynEvent event) {
// 不论事件是在哪个线程中发布出来的,onEventMainThread都会在UI线程中执行,接收事件就会在UI线程中运行,同 @Subscribe(threadMode = ThreadMode.MAIN)
}
public void onEventBackgroundThread(DataSynEvent event) {
//那么如果事件是在UI线程中发布出来的,那么onEventBackground就会在子线程中运行,如果事件本来就是子线程中发布出来的,那么onEventBackground函数直接在该子线程中执行,同 @Subscribe(threadMode = ThreadMode.BACKGROUND)
}
public void onEventAsync(DataSynEvent event) {
//使用这个函数作为订阅函数,那么无论事件在哪个线程发布,都会创建新的子线程在执行onEventAsync,同 @Subscribe(threadMode = ThreadMode.ASYNC)
}EventBus 3.0 函数名字不再受到权限,而且可以在一个函数中体现出在哪个线程执行,并且可指定接收事件的优先级
/**
* 普通事件
* @param event
*/
@Subscribe(threadMode = ThreadMode.MAIN, priority = 100)
public void onDataSynEvent(DataSynEvent event) {
}
/**
* 粘性事件
* @param event
*/
@Subscribe(threadMode = ThreadMode.MAIN, priority = 100, sticky = true)
public void onDataSynEvent(DataSynEvent event) {
}EventBus 2.x 注册方式也比较繁琐
public void register(Object subscriber) {
register(subscriber, false, 0);
}
public void register(Object subscriber, int priority) {
register(subscriber, false, priority);
}
public void registerSticky(Object subscriber) {
register(subscriber, true, 0);
}
public void registerSticky(Object subscriber, int priority) {
register(subscriber, true, priority);
}
private void subscribe(Object subscriber, SubscriberMethod subscriberMethod, boolean sticky, int priority) {
...
}EventBus 3.0 注册方式只有一个
public void register(Object subscriber) {
Class<?> subscriberClass = subscriber.getClass();
List<SubscriberMethod> subscriberMethods = subscriberMethodFinder.findSubscriberMethods(subscriberClass);
synchronized (this) {
for (SubscriberMethod subscriberMethod : subscriberMethods) {
subscribe(subscriber, subscriberMethod);
}
}
}以上还是在一个订阅者仅仅订阅一个事件的情况下,如果订阅多个事件,可想而知EventBus 2.x势必导致订阅者要写大量的多态函数,如果订阅多种类型事件,比如普通事件和粘性事件并存,估计要同时调用register,registerSticky两个函数。
2.)性能更优
EventBus 2.x 是采用反射的方式对整个注册的类的所有方法进行扫描来完成注册,当然会有性能上的影响。EventBus 3.0中EventBus提供了EventBusAnnotationProcessor注解处理器来在编译期通过读取@Subscribe()注解并解析、处理其中所包含的信息,然后生成java类来保存所有订阅者关于订阅的信息,这样就比在运行时使用反射来获得这些订阅者的信息速度要快
小结:
EventBus 3.0的使用基本上总结完了,之前一直担心EventBus通过注解或者反射会影响太多性能,随着3.0的发布这部分影响已经很小了相关文章:
EventBus使用详解
老司机教你
“飙” EventBus 3

相关文章推荐
- Android消息传递之EventBus 3.0使用详解(三)
- Android消息传递之EventBus 3.0使用详解
- Android消息传递之EventBus 3.0使用详解
- (转)Android消息传递之EventBus 3.0使用详解
- Android消息传递之EventBus 3.0使用详解
- Android消息传递之EventBus 3.0使用详解(转载)
- Android消息传递之EventBus 3.0使用详解
- Android消息传递之EventBus 3.0使用详解
- Android 框架学习1:EventBus 3.0 的特点与如何使用
- Google EventBus 使用详解
- EventBus使用详解(一)——初步使用EventBus
- android EventBus 3.0使用指南
- android EventBus 3.0使用指南
- android EventBus 3.0使用指南
- Android EventBus组件间通信的使用及详解
- EventBus使用详解(二)——EventBus使用进阶
- Android EventBus使用详解
- EventBus使用详解(一)——初步使用EventBus
- Android 框架学习1:EventBus 3.0 的特点与如何使用
- Android事件总线之EventBus3.0基本使用